换一换
换一换 





成就 本指南介绍游戏中的成就获取方法,自行获取并不困难,若遇到问题可参考本指南。 快速搜索可使用Ctrl + F并输入所需成就名称。 1.你好,世界

运行第一个程序 do_a_flip() 2. 无限循环

创建无限循环 while True: do_a_flip() 3. 显著增长 | It Grew

扩建农场

4. é误

触发程序错误 give_me_my_achievement() 5. 杂技演员

做个后空翻 do_a_flip() 6. 时尚风格

戴上新帽子 | 装备一顶新帽子 更换帽子(帽子.绿色帽子) 更换帽子(帽子.棕色帽子) 7. 愉悦的感觉 | 感觉良好

摸小猪 | 抚摸小猪 循环执行: 抚摸小猪() 8. 高阶编程 | 高阶编程

将一个函数作为参数传递给另一个函数 定义任务(动作): 循环 真: 动作() 定义 动作(): 执行翻转() 定义 启动无人机(): 任务(动作) 生成无人机(启动无人机) 9. 泥浆农场

将整个农场的水位提升至0.5以上 clear() world = get_world_size() for y in range(world): for x in range(world): for _ in range(5): use_item(Items.Water) move(East) move(North) 10. 迷宫

生成迷宫 种植(实体.灌木) 物质 = 获取世界大小() * 2**(已解锁数量(解锁.迷宫) - 1) 使用物品(物品.怪异物质,物质) 11. 寻宝猎人

通过占据整个农场的迷宫 清空() 定义 工作(): 种植(实体.灌木) 世界大小 = 获取世界大小() 迷宫等级 = 已解锁数量(解锁项.迷宫) 物质数量 = 世界大小 * (2 ** (迷宫等级 - 1)) 使用物品(物品.怪异物质, 物质数量) 方向 = [北, 东, 南, 西] 当前索引 = 0 循环 真: 当前实体 = 获取实体类型() 如果 当前实体 == 实体.宝藏: 收获() 返回 右索引 = (当前索引 + 1) % 4 左索引 = (当前索引 - 1) % 4 右方向 = 方向[右索引] 左方向 = 方向[左索引] 当前方向 = 方向[当前索引] 如果 可移动(右方向): 当前索引 = 右索引 移动(方向[当前索引]) 否则如果 可移动(当前方向): 移动(方向[当前索引]) 否则如果 可移动(左方向): 当前索引 = 左索引 移动(方向[当前索引]) 否则: 当前索引 = (当前索引 + 2) % 4 循环: 工作() 12. 超级农场 | Megafarm

使用多个无人机 clear() def harvest_column(): for _ in range(get_world_size()): do_a_flip() move(北) while True: if spawn_drone(harvest_column): move(东) 13. 治疗者

治愈被感染的植物 14. 大型农场
将农场扩展到最大规模
15. 混沌(Chaos)

同时打开20个代码窗口

16. 技艺精湛的杂技演员 | Master Acrobat

完成1000次空翻 clear() def flip_forever(): while True: do_a_flip() def make_drone(offset): def drone_behavior(): for step in range(offset): move(East) while True: do_a_flip() return drone_behavior def main(): number_of_drones = 32 for i in range(number_of_drones): spawn_drone(make_drone(i)) flip_forever() main() 17. 长恐龙

创造一只占据整个农场的恐龙 查看 42. 骨骼收集 检查 42. Bone Farmer 18. 错误顺序

将满场的仙人掌按错误顺序排列 19. 蜂群

同时使用32架无人机 clear() TOTAL_DRONES = 31 def do_flip_forever(): while True: do_a_flip() for _ in range(TOTAL_DRONES): spawn_drone(do_flip_forever) do_flip_forever() 20. 巨大南瓜
收集32×32大小的南瓜 | 收获一个32x32的南瓜 用于32×32的田地和32个无人机 宽度,高度 = 32,32 定义种植或耕种(): 如果不能收获(): 种植(实体.南瓜) 如果获取地面类型() == 地面.草地: 耕种() 种植(实体.南瓜) 定义检查水分(): 如果获取水分() == 0: 使用物品(物品.水) 定义工作(步数=0): 对于_在范围(步数)内: 移动(东) 循环: 对于_在范围(宽度)内: 对于_在范围(高度)内: 检查水分() 如果获取位置X() == 0 且 获取位置Y() == 0 且 可以收获(): 收获() 种植或耕种() 移动(北) 定义生成无人机(): 对于步数在范围(31)内: 定义无人机任务(): 工作(步数) 生成无人机(无人机任务) 清除() 生成无人机() 工作(31) 用于32×32的田地和1个无人机 宽度,高度 = 32,32 定义种植或耕种(): 如果不能收获(): 种植(实体.南瓜) 如果获取地面类型() == 地面.草地: 耕种() 种植(实体.南瓜) 定义检查水分(): 如果获取水分() == 0: 使用物品(物品.水) 定义执行工作(): 循环 真: 对于 行 在 范围(宽度): 对于 列 在 范围(高度): 检查水分() 如果 获取位置X() == 0 且 获取位置Y() == 0 且 可收获(): 收获() 种植或耕种() 移动(北) 移动(东) 清除() 执行工作() 21. 循环导入

创建循环导入 控制台1 导入f10(你的文件名) 定义函数a(): 打印"模块a" f10.函数b()(你的文件名) 控制台2 导入f0(你的文件名) 定义函数b(): 打印"模块b" f0.函数a()(你的文件名) 22. 堆栈溢出

引发堆栈溢出 定义堆栈溢出(): 堆栈溢出() 堆栈溢出() 23. 尺寸很重要

将恐龙长度增加到1000 查看42. Bone Farmer 24. 回收

重复使用同一个迷宫300次 定义导航至位置函数(目标x坐标, 目标y坐标): 世界大小 = 获取世界大小() 当前位置x = 获取位置x() 当前位置y = 获取位置y() 水平距离 = (目标x坐标 - 当前位置x) 对世界大小取模 垂直距离 = (目标y坐标 - 当前位置y) 对世界大小取模 如果 水平距离 < 世界大小 // 2: 循环 水平距离 次: 移动(东) 否则: 循环 (世界大小 - 水平距离) 次: 移动(西) 如果 垂直距离 < 世界大小 // 2: 循环 垂直距离 次: 移动(北) 否则: 循环 (世界大小 - 垂直距离) 次: 移动(南) 定义使用无人机收集黄金函数(目标数量): 定义无人机工作函数(): 宝藏数量 = 0 当前无人机ID =num_drones() - 1 当 num_drones()不等于25时: 等待 当 num_items(Items.Gold)小于目标数量时: 如果 get_entity_type()等于Entities.Grass: treasure_count = 0 如果 current_drone_id等于1且get_entity_type()等于Entities.Grass: 种植(Entities.Bush) 使用物品(Items.Weird_Substance, 160) 如果 get_entity_type()等于Entities.Treasure: 使用物品(Items.Weird_Substance, 160) treasure_count += 1 如果 treasure_count等于45: 收获() 如果 num_items(Items.Gold)小于目标数量: initial_world_size = get_world_size() 导航至位置(0, 0) 如果 num_unlocked(Unlocks.当扩展值大于等于4且无人机最大数量大于等于25时:临时世界大小设为5,否则返回。设置世界大小为临时世界大小。对于临时世界大小范围内的x和y,若x不是临时世界大小减1或y不是临时世界大小减1,则生成工蜂无人机并向北移动。在x循环中,若x不是临时世界大小减1或y不是临时世界大小减1,则向东移动。执行工蜂无人机函数。当无人机数量不等于1时持续等待。设置世界大小为初始世界大小。用无人机收集1000000000000金币。25. 时装秀

给5架无人机分别戴上5种不同的帽子 帽子列表 = [ 胡萝卜帽, 向日葵帽, 南瓜帽, 树木帽, 仙人掌帽 ] 循环5次: 定义无人机(): 更换帽子(帽子列表[索引]) 无限循环: 后空翻() 生成无人机(无人机) 26.接下来做什么?

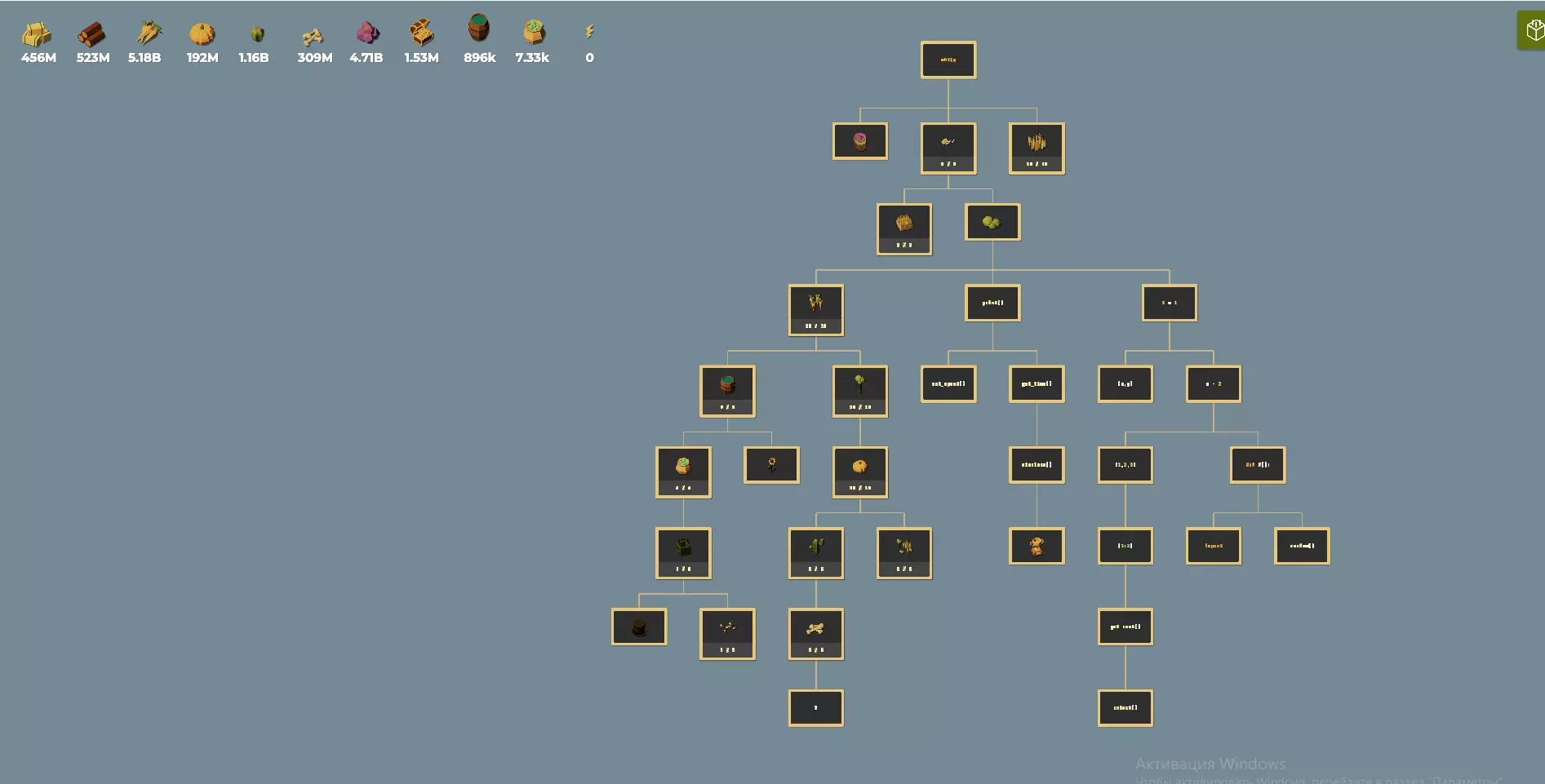
解锁所有内容
27. 农场主竞赛

进入排行榜 clear() 植物类型解锁映射 = { 实体.灌木: 解锁.植物, 实体.树木: 解锁.树木, 实体.胡萝卜: 解锁.胡萝卜, 实体.南瓜: 解锁.南瓜, 实体.仙人掌: 解锁.仙人掌, 实体.向日葵: 解锁.向日葵, } 无人机位置_32X32 = [ (0, 0), (8, 0), (16, 0), (24, 0), (4, 4), (12, 4), (20, 4), (28, 4), (0, 8), (8, 8), (16, 8), (24, 8), (4, 12), (12, 12), (20, 12), (28, 12), (0, 16), (8, 16), (16, 16), (24, 16), (4, 20), (12, 20), (20, 20), (28, 20), (0, 24), (8, 24), (16, 24), (24, 24), (4, 28), (12, 28), (20, 28), (28, 28), ] 资源配置 = { 物品.干草: { "植物类型": 实体.草, "肥料": 否, "特殊物质": 否, "水": 是, "需要准备": 否, "选择种植功能": 无, }, 物品.木材: { "植物类型": 无, "肥料": 是, "特殊物质": 是, "水": 是, "需要准备": 否, "选择种植功能": "select_wood_plant", }, 物品.胡萝卜: { "植物类型": 实体.无法识别内容,已删除。胡萝卜(目标数量) 定义 用无人机收集南瓜(目标数量): 定义 无人机种植者(): 当前无人机ID = 无人机数量() 如果 当前无人机ID 不等于 1 且 获取X坐标()不等于 初始世界大小 - 1: 移动(东) 如果 当前无人机ID 不等于 最大无人机数 且 获取X坐标()不等于 初始世界大小 - 1: 生成无人机(无人机种植者) 循环 _ 在 范围内( 28. 完全自动化 | Full Automation无法识别或无法翻译,已删除。如果可以收获(): 返回 如果使用肥料且已解锁肥料数量不等于0且肥料物品数量大于等于1: 使用肥料物品 如果使用奇异物质且奇异物质物品数量大于等于1: 使用奇异物质物品 如果使用水且已解锁浇水功能数量不等于0且当前水量小于1且水物品数量大于等于1: 使用水物品 定义准备土壤并种植(植物类型): 当前实体类型 = 获取实体类型() 当前地面类型 = 获取地面类型() 如果植物类型不等于当前实体类型: 收获() 如果植物类型 == 实体.草: 如果当前地面类型不等于地面.草地: 耕地() 否则: 如果当前地面类型不等于地面.无法翻译的内容已删除(内容无法识别,已删除)(内容为代码片段,无法按游戏汉化规则处理,已删除)无法识别内容,已删除。(内容无法识别,已删除)无法识别或无法翻译,已删除。

进入完全重置排行榜 27步 第一步 在农场进行你的第一次操作。 29. 灌木丛

种植灌木 清除() 种植(实体.灌木) 30. 树木
种树 清除() 种植(实体.树) 31. 向日葵

种植向日葵 清除() 耕地() 种植(实体.向日葵) 32. 胡萝卜

种植胡萝卜 清理() 耕地() 种植(实体.胡萝卜) 33. 南瓜

种植南瓜 清除() 耕地() 种植(实体.南瓜) 34. 仙人掌

种植仙人掌 清除() 耕地() 种植(实体.仙人掌) 35. 恐龙

装备恐龙帽子 clear() change_hat(Hats.Dinosaur_Hat) 收获 从事农业并收获你的庄稼。 36. 干草收集者

收集1000份干草 定义收割(): 尺寸 = 获取世界大小() 循环 _ 在 范围(尺寸)内: 收割() 向北移动 无限循环: 如果 生成无人机(收割()): 向东移动 37. 收集木材

收集1000份木材 | 收集1000份木材 针对32×32的田地和32架无人机 clear() def work(offset=0): for _ in range(offset): move(东) while True: size = get_world_size() for row in range(size): for col in range(size): use_item(物品.水) use_item(物品.奇异物质) if get_pos_y()在(32, 30, 28, 26, 24)中: if can_harvest(): harvest() if get_ground_type() != 地面.土壤: till() plant(实体.向日葵) elif get_pos_y()除以2余数为0且get_pos_x()除以2余数为0: if can_harvest(): harvest() plant(实体.树) else: if get_entity_type() != None: plant(实体.灌木) if can_harvest(): harvest() plant(实体.灌木) move(北) for i in range(31): def make_drone(offset=i): def drone(): work(offset) return drone spawn_drone(make_drone()) work(31) 38.能量收集 | 能量农夫

收集1000能量 | 种植1000能量 针对32×32田地和32架无人机 clear() 无人机数量 = 31 世界大小 = 获取世界大小() 定义工作(偏移量=0): 循环(偏移量)次: 向东移动 无限循环: 循环行从0到世界大小-1: 循环列从0到世界大小-1: 如果可以收获(): 收获() 如果地面类型()不等于土壤: 耕地() 种植(向日葵) 向北移动 定义制造无人机(偏移量): 定义无人机任务(): 工作(偏移量) 返回无人机任务 循环i从0到无人机数量-1: 生成无人机(制造无人机(i)) 工作(无人机数量) 39. 收集胡萝卜 | 胡萝卜农夫

收集1000个胡萝卜 | 种植1000个胡萝卜 clear() FIELD_SIZE = 获取世界大小() NUMBER_OF_DRONES = 31 def 胡萝卜(): if 可以收获(): 收获() if 获取地面类型() == 地面.草地: 耕种() 种植(实体.胡萝卜) def 工作(无人机偏移=0): for _ in range(无人机偏移): 移动(东) while True: for 行 in range(FIELD_SIZE): for 列 in range(FIELD_SIZE): 胡萝卜() 移动(北) def 创建无人机(偏移): def 无人机行为(): 工作(偏移) return 无人机行为 for i in range(NUMBER_OF_DRONES): 生成无人机(创建无人机(i)) 工作(NUMBER_OF_DRONES) 40. 收集南瓜 | Pumpkin Farmer

收集1000个南瓜 | 种植1000个南瓜 清除() 无人机数量 = 31 世界大小 = 获取世界大小() 定义 南瓜(): 如果 无法收获() == 假: 种植(实体.南瓜) 如果 获取地面类型() == 地面.草地: 耕种() 种植(实体.南瓜) 定义 工作(次数=0): 对于 计数 在 范围(次数)内: 移动(东) 循环 真: 对于 _ 在 范围(世界大小)内: 对于 _ 在 范围(世界大小)内: 如果 获取水分() == 0: 使用物品(物品.水) 如果 获取X坐标() == 0 且 获取Y坐标() == 0: 如果 可以收获(): 收获() 南瓜() 否则: 南瓜() 移动(北) 定义 创建无人机(次数): 定义 无人机(): 工作(次数) 返回 无人机 对于 计数 在 范围(无人机数量)内: 生成无人机(创建无人机(计数)) 工作(无人机数量) 41. 收集仙人掌 | 仙人掌农夫

收集1000个仙人掌 | 种植1000个仙人掌 42. 收集骨头 | Bone Farmer

收集1000根骨头 clear() def work_as_dino(): change_hat(Hats.Dinosaur_Hat) world_size = get_world_size() current_y = world_size - 1 current_direction = East while True: if current_direction == East: for step in range(world_size - 1): move(East) else: for step in range(world_size - 2): move(West) if current_y > 0: move(North) current_y = current_y - 1 if current_direction == East: current_direction = West else: current_direction = East else: move(West) for step in range(world_size - 1): move(South) current_y = current_y + 1 current_direction = East work_as_dino() 43. 收集黄金

收集1000金币 清空() 定义 工作(): 种植(实体.灌木) 世界大小 = 获取世界大小() 迷宫等级 = 已解锁数量(解锁项.迷宫) 物质数量 = 世界大小 * (2 ** (迷宫等级 - 1)) 使用物品(物品.怪异物质, 物质数量) 方向 = [北, 东, 南, 西] 当前索引 = 0 循环 真: 当前实体 = 获取实体类型() 如果 当前实体 == 实体.宝藏: 收获() 返回 右索引 = (当前索引 + 1) % 4 左索引 = (当前索引 - 1) % 4 右方向 = 方向[右索引] 左方向 = 方向[左索引] 当前方向 = 方向[当前索引] 如果 可以移动(右方向): 当前索引 = 右索引 移动(方向[当前索引]) 否则如果 可以移动(当前方向): 移动(当前方向) 否则如果 可以移动(左方向): 当前索引 = 左索引 移动(方向[当前索引]) 否则: 当前索引 = (当前索引 + 2) % 4 循环: 工作() 《疯狂农场》 探索最高效的农作物收获方法! 44. 大干草收获者 | Big Hay Farmer

收集10亿干草 查看36. 干草收集 查看36. Hay Farmerr 45. 大量木材收集 | Big Wood Farmer

收集10亿木材 查看37. 木材收集 检查37. Wood Farmer 46. 大量收集能量

收集100000能量 | 收集100000能量 查看38. 能量收集者 查看38. Power Farmer 47. 大量收集胡萝卜 | Big Carrot Farmer

收集10亿根胡萝卜 查看39. 胡萝卜收集 检查39. Carrot Farmer 48. 大量收集南瓜 | Big Pumpkin Farmer

收集100000000个南瓜 查看40. 南瓜收集 检查40. Pumpkin Farmer 49. 大量收集仙人掌 | Big Cactus Farmer

收集100000000个仙人掌 | 种植100000000个仙人掌 检查6 50. 大量收集骨头 | Big Bone Farmer
收集100000000根骨头 查看42. 骨头收集者 查看42. Bone Farmer 51. 大量收集黄金 Big Gold Farmer

收集100000000金币 查看43. 金币收集 检查43. Gold Farmer 【丰收大师】 此成就类别专为真正的大师打造!以创纪录的时间收集资源。 52. 干草大师

无法翻译的内容已删除草, "肥料": 否, "特殊物质": 否, "水": 是, "需要准备": 否, "选择种植功能": 无, }, 物品.木材: { "植物类型": 无, "肥料": 是, "特殊物质": 是, "水": 是, "需要准备": 否, "选择种植功能": "select_wood_plant", }, 物品.胡萝卜: { "植物类型": 实体.无法识别或无法翻译,已删除。如果可以收获(): 返回 如果使用肥料且已解锁肥料(解锁项.肥料)不为0且肥料(物品.肥料)数量>=1: 使用物品(物品.肥料) 如果使用奇异物质且奇异物质(物品.奇异物质)数量>=1: 使用物品(物品.奇异物质) 如果使用水且已解锁浇水(解锁项.浇水)不为0且当前水量<1且水(物品.水)数量>=1: 使用物品(物品.水) 定义准备土壤并种植(植物类型): 当前实体类型=获取实体类型() 当前地面类型=获取地面类型() 如果植物类型不等于当前实体类型: 收获() 如果植物类型=实体.草: 如果当前地面类型不等于地面.草地: 耕地() 否则: 如果当前地面类型不等于地面.土壤: 翻耕() 如果植物类型在植物类型解锁映射表中: 所需解锁项 = 植物类型解锁映射表[植物类型] 如果已解锁数量(所需解锁项)不等于0: 种植(植物类型) 定义选择木材植物(): 如果已解锁数量(解锁项.树木)不等于0: 返回实体.树木 否则如果已解锁数量(解锁项.植物)不等于0: 返回实体.灌木 返回空 定义单独收集干草(目标数量): 当物品数量(物品.干草)小于目标数量时: 准备土壤并种植(实体.草) 当不能收获时: 施加肥料和浇水(否,否,是) 收获() 定义单独收集木材(目标数量): 当物品数量(物品.无法识别或无法翻译,已删除。无法识别或无法翻译,已删除。无法识别内容,已删除。= 伴生植物类型: 导航至位置(伴生植物X坐标, 伴生植物Y坐标) 满足伴生植物种植要求(伴生植物类型, 胡萝卜成本) 准备土壤并种植(伴生植物类型) 种植位置地图[(伴生植物X坐标, 伴生植物Y坐标)] = 伴生植物类型 导航至位置(无人机位置[0], 无人机位置[1]) 当无法收获时: 施加肥料和浇水( 配置["肥料"], 配置["特殊物质"], 配置["水"] ) 收获() 如果资源物品数量 < 目标数量: 如果配置["需要准备"]: 如果物品.干草数量 < 胡萝卜成本[物品.干草]: 单独收集干草(胡萝卜成本[物品.干草]) 如果物品.木材数量 < 胡萝卜成本[物品.木材]: 单独收集木材(胡萝卜成本[物品.53. 木材大师 | Wood Master

Собери 1 000 000 000 древесины за минуту | Farm 1 billion wood in 1 minute Вам нужно заранее собрать Удобрение и Энергию, чтобы получить достижение. / You need to collect Fertilizer and Power in advance to get the achievement clear() PLANT_TYPE_TO_UNLOCK_MAPPING = { Entities.Bush: Unlocks.Plant, Entities.Tree: Unlocks.Trees, Entities.Carrot: Unlocks.Carrots, Entities.Pumpkin: Unlocks.Pumpkins, Entities.Cactus: Unlocks.Cactus, Entities.Sunflower: Unlocks.Sunflowers, } DRONE_POSITIONS_32X32 = [ (0, 0), (8, 0), (16, 0), (24, 0), (4, 4), (12, 4), (20, 4), (28, 4), (0, 8), (8, 8), (16, 8), (24, 8), (4, 12), (12, 12), (20, 12), (28, 12), (0, 16), (8, 16), (16, 16), (24, 16), (4, 20), (12, 20), (20, 20), (28, 20), (0, 24), (8, 24), (16, 24), (24, 24), (4, 28), (12, 28), (20, 28), (28, 28), ] RESOURCE_CONFIG = { Items.Hay: { "plant_type": Entities.Grass, "fertilizer": False, "weird_substance": False, "water": True, "needs_preparation": False, "select_plant_function": None, }, Items.Wood: { "plant_type": None, "fertilizer": True, "weird_substance": True, "water": True, "needs_preparation": False, "select_plant_function": "select_wood_plant", }, Items.Carrot: { "plant_type": Entities.Carrot, "fertilizer": True, "weird_substance": True, "water": True, "needs_preparation": True, "select_plant_function": None, }, } def navigate_to_position(target_x, target_y): world_size = get_world_size() current_position_x = get_pos_x() current_position_y = get_pos_y() horizontal_distance = (target_x - current_position_x) % world_size vertical_distance = (target_y - current_position_y) % world_size if horizontal_distance < world_size // 2: for _ in range(horizontal_distance): move(East) else: for _ in range(world_size - horizontal_distance): move(West) if vertical_distance < world_size // 2: for _ in range(vertical_distance): move(North) else: for _ in range(world_size - vertical_distance): move(South) def apply_fertilizer_and_water(use_fertilizer, use_weird_substance, use_water): if can_harvest(): return if use_fertilizer and num_unlocked(Unlocks.Fertilizer) != 0 and num_items(Items.Fertilizer) >= 1: use_item(Items.Fertilizer) if use_weird_substance and num_items(Items.Weird_Substance) >= 1: use_item(Items.Weird_Substance) if use_water and num_unlocked(Unlocks.Watering) != 0 and get_water() < 1 and num_items(Items.Water) >= 1: use_item(Items.Water) def prepare_soil_and_plant(plant_type): current_entity_type = get_entity_type() current_ground_type = get_ground_type() if plant_type != current_entity_type: harvest() if plant_type == Entities.Grass: if current_ground_type != Grounds.Grassland: till() else: if current_ground_type != Grounds.Soil: till() if plant_type in PLANT_TYPE_TO_UNLOCK_MAPPING: required_unlock = PLANT_TYPE_TO_UNLOCK_MAPPING[plant_type] if num_unlocked(required_unlock) != 0: plant(plant_type) def select_wood_plant(): if num_unlocked(Unlocks.Trees) != 0: return Entities.Tree elif num_unlocked(Unlocks.Plant) != 0: return Entities.Bush return None def collect_hay_solo(target_quantity): while num_items(Items.Hay) < target_quantity: prepare_soil_and_plant(Entities.Grass) while not can_harvest(): apply_fertilizer_and_water(False, False, True) harvest() def collect_wood_solo(target_quantity): while num_items(Items.Wood) < target_quantity: wood_plant = select_wood_plant() if wood_plant == None: return prepare_soil_and_plant(wood_plant) while not can_harvest(): apply_fertilizer_and_water(True, True, True) harvest() def collect_carrot_solo(target_quantity): carrot_cost = get_cost(Entities.Carrot) while num_items(Items.Carrot) < target_quantity: if num_items(Items.Hay) < carrot_cost[Items.Hay]: collect_hay_solo(carrot_cost[Items.Hay]) if num_items(Items.Wood) < carrot_cost[Items.Wood]: collect_wood_solo(carrot_cost[Items.Wood]) prepare_soil_and_plant(Entities.Carrot) while not can_harvest(): apply_fertilizer_and_water(True, True, True) harvest() def fulfill_companion_plant_requirements(companion_plant_type, carrot_cost): if companion_plant_type == Entities.Carrot: if num_items(Items.Hay) < carrot_cost[Items.Hay]: collect_hay_solo(carrot_cost[Items.Hay]) if num_items(Items.Wood) < carrot_cost[Items.Wood]: collect_wood_solo(carrot_cost[Items.Wood]) def get_plant_type_for_resource(resource_item, config): if config["select_plant_function"] == "select_wood_plant": return select_wood_plant() return config["plant_type"] def collect_resource_with_drones(resource_item, target_quantity): if resource_item not in RESOURCE_CONFIG: return config = RESOURCE_CONFIG[resource_item] carrot_cost = get_cost(Entities.Carrot) def drone_worker(): current_drone_id = num_drones() if current_drone_id < 32: spawn_drone(drone_worker) drone_position = DRONE_POSITIONS_32X32[current_drone_id - 1] navigate_to_position(drone_position[0], drone_position[1]) plant_type = get_plant_type_for_resource(resource_item, config) if plant_type == None: return while num_items(resource_item) < target_quantity: prepare_soil_and_plant(plant_type) companion_plant_type, (companion_x, companion_y) = get_companion() if (companion_x, companion_y) not in plant_position_map: plant_position_map[(companion_x, companion_y)] = None if plant_position_map[(companion_x, companion_y)] != companion_plant_type: navigate_to_position(companion_x, companion_y) fulfill_companion_plant_requirements(companion_plant_type, carrot_cost) prepare_soil_and_plant(companion_plant_type) plant_position_map[(companion_x, companion_y)] = companion_plant_type navigate_to_position(drone_position[0], drone_position[1]) while not can_harvest(): apply_fertilizer_and_water( config["fertilizer"], config["weird_substance"], config["water"] ) harvest() if num_items(resource_item) < target_quantity: if config["needs_preparation"]: if num_items(Items.Hay) < carrot_cost[Items.Hay]: collect_hay_solo(carrot_cost[Items.Hay]) if num_items(Items.Wood) < carrot_cost[Items.Wood]: collect_wood_solo(carrot_cost[Items.Wood]) initial_world_size = get_world_size() plant_position_map = {} navigate_to_position(0, 0) if num_unlocked(Unlocks.Expand) == 9 and max_drones() == 32: temporary_world_size = 32 else: return set_world_size(temporary_world_size) drone_worker() while num_drones() != 1: pass set_world_size(initial_world_size) collect_resource_with_drones(Items.Wood, 1000000000000) 54. Мастер подсолнухов | Sunflower Master

一分钟收集12000能量 clear() 植物类型解锁映射 = { 实体.灌木: 解锁.植物, 实体.树木: 解锁.树木, 实体.胡萝卜: 解锁.胡萝卜, 实体.南瓜: 解锁.南瓜, 实体.仙人掌: 解锁.仙人掌, 实体.向日葵: 解锁.无法识别或无法翻译,已删除。肥料)>= 1: 使用物品(物品.肥料) 如果使用奇异物质且物品(物品.奇异物质)数量 >= 1: 使用物品(物品.奇异物质) 如果使用水且解锁(解锁.浇水)数量不为0且获取水量 < 1且物品(物品.水)数量 >= 1: 使用物品(物品.水) 定义准备土壤和种植(植物类型): 当前实体类型 = 获取实体类型() 当前地面类型 = 获取地面类型() 如果植物类型 != 当前实体类型: 收获() 如果植物类型 == 实体.草: 如果当前地面类型 != 地面.草地: 耕地() 否则: 如果当前地面类型 != 地面.土壤: 耕地() 如果植物类型在植物类型到解锁映射中: 所需解锁 = 植物类型到解锁映射[植物类型] 如果解锁(所需解锁)数量 !=55. 胡萝卜大师 | Carrot Master

一分钟内收集2000万根胡萝卜 要获得该成就,你需要提前收集肥料和能量。 首先,按照步骤38的方法通过收集向日葵来积累能量。收集能量后,使用此代码: clear() PLANT_TYPE_TO_UNLOCK_MAPPING = { Entities.Bush: Unlocks.Plant, Entities.Tree: Unlocks.Trees, Entities.Carrot: Unlocks.Carrots, Entities.Pumpkin: Unlocks.Pumpkins, Entities.Cactus: Unlocks.仙人掌, 实体.向日葵:解锁.向日葵, } 无人机位置_32X32 = [ (0, 0), (8, 0), (16, 0), (24, 0), (4, 4), (12, 4), (20, 4), (28, 4), (0, 8), (8, 8), (16, 8), (24, 8), (4, 12), (12, 12), (20, 12), (28, 12), (0, 16), (8, 16), (16, 16), (24, 16), (4, 20), (12, 20), (20, 20), (28, 20), (0, 24), (8, 24), (16, 24), (24, 24), (4, 28), (12, 28), (20, 28), (28, 28), ] 资源配置 = { 物品.干草:{ "植物类型": 实体.草, "肥料": 否, "特殊物质": 否, "水": 是, "需要准备": 否, "选择植物函数": 无, }, 物品.木材:{ "植物类型": 无, "肥料": 是, "特殊物质": 是, "水": 是, "需要准备": 否, "选择植物函数": "select_wood_plant", }, 物品.胡萝卜:{ "植物类型": 实体.无法识别或无法翻译,已删除。如果可以收获(): 返回 如果使用肥料且已解锁肥料(解锁项.肥料)不为0且肥料(物品.肥料)数量>=1: 使用物品(物品.肥料) 如果使用奇异物质且奇异物质(物品.奇异物质)数量>=1: 使用物品(物品.奇异物质) 如果使用水且已解锁浇水(解锁项.浇水)不为0且当前水量<1且水(物品.水)数量>=1: 使用物品(物品.水) 定义准备土壤并种植(植物类型): 当前实体类型=获取实体类型() 当前地面类型=获取地面类型() 如果植物类型不等于当前实体类型: 收获() 如果植物类型=实体.草: 如果当前地面类型不等于地面.草地: 耕地() 否则: 如果当前地面类型不等于地面.土壤: 翻耕() 如果植物类型在植物类型解锁映射表中: 所需解锁项 = 植物类型解锁映射表[植物类型] 如果已解锁数量(所需解锁项)不等于0: 种植(植物类型) 定义选择木材植物(): 如果已解锁数量(解锁项.树木)不等于0: 返回实体.树木 否则如果已解锁数量(解锁项.植物)不等于0: 返回实体.灌木 返回空 定义单独收集干草(目标数量): 当物品数量(物品.干草)小于目标数量时: 准备土壤并种植(实体.草) 当不能收获时: 施加肥料和浇水(否,否,是) 收获() 定义单独收集木材(目标数量): 当物品数量(物品.无法识别内容,已删除。无法识别或无法翻译,已删除。无法识别内容,已删除。= 伴生植物类型: 导航至位置(伴生植物X坐标, 伴生植物Y坐标) 满足伴生植物种植要求(伴生植物类型, 胡萝卜成本) 准备土壤并种植(伴生植物类型) 种植位置地图[(伴生植物X坐标, 伴生植物Y坐标)] = 伴生植物类型 导航至位置(无人机位置[0], 无人机位置[1]) 当无法收获时: 施加肥料和浇水( 配置["肥料"], 配置["特殊物质"], 配置["水"] ) 收获() 如果资源物品数量 < 目标数量: 如果配置["需要准备"]: 如果物品.干草数量 < 胡萝卜成本[物品.干草]: 单独收集干草(胡萝卜成本[物品.干草]) 如果物品.木材数量 < 胡萝卜成本[物品.木材]: 单独收集木材(胡萝卜成本[物品.56. 南瓜大师 | Pumpkin Master

一分钟内收获2000万个南瓜。要获得该成就,你需要提前收集肥料和能量。 clear() PLANT_TYPE_TO_UNLOCK_MAPPING = { Entities.Bush: Unlocks.Plant, Entities.Tree: Unlocks.Trees, Entities.Carrot: Unlocks.Carrots, Entities.Pumpkin: Unlocks.Pumpkins, Entities.Cactus: Unlocks.Cactus, Entities.Sunflower: Unlocks.无法识别或无法翻译,已删除。肥料)>= 1: 使用物品(物品.肥料) 如果使用奇异物质且物品(物品.奇异物质)数量 >= 1: 使用物品(物品.奇异物质) 如果使用水且解锁(解锁.浇水)数量不为0且获取水量 < 1且物品(物品.水)数量 >= 1: 使用物品(物品.水) 定义准备土壤和种植(植物类型): 当前实体类型 = 获取实体类型() 当前地面类型 = 获取地面类型() 如果植物类型 != 当前实体类型: 收获() 如果植物类型 == 实体.草: 如果当前地面类型 != 地面.草地: 耕种() 否则: 如果当前地面类型 != 地面.土壤: 耕种() 如果植物类型在植物类型到解锁映射中: 所需解锁 = 植物类型到解锁映射[植物类型] 如果解锁(所需解锁)数量 !=无法识别内容,已删除。南瓜) navigate_to_position(0, 0) while num_items(Items.Pumpkin) < target_quantity: required_carrots = pumpkin_cost[Items.Carrot] * (initial_world_size * initial_world_size * 2) if num_items(Items.Carrot) < required_carrots: collect_carrot_with_drones(required_carrots) drone_planter() while num_drones() != 1: pass harvest() while num_drones() != 1: pass collect_pumpkin_with_drones(1000000000000) 57. 仙人掌大师 | Cactus Master

一分钟内收集2000万仙人掌 clear() PLANT_TYPE_TO_UNLOCK_MAPPING = { Entities.Bush: Unlocks.Plant, Entities.Tree: Unlocks.Trees, Entities.Carrot: Unlocks.Carrots, Entities.Pumpkin: Unlocks.Pumpkins, Entities.Cactus: Unlocks.Cactus, Entities.Sunflower: Unlocks.无法识别内容,已删除。肥料) >= 1: 使用物品(物品.肥料) 如果使用奇异物质且物品数量(物品.奇异物质) >= 1: 使用物品(物品.奇异物质) 如果使用水且已解锁数量(解锁.浇水)不等于0且获取水量() < 1且物品数量(物品.水) >= 1: 使用物品(物品.水) 定义准备土壤和种植(植物类型): 当前实体类型 = 获取实体类型() 当前地面类型 = 获取地面类型() 如果植物类型不等于当前实体类型: 收获() 如果植物类型 == 实体.草: 如果当前地面类型不等于地面.草地: 耕地() 否则: 如果当前地面类型不等于地面.土壤: 耕地() 如果植物类型在植物类型到解锁映射中: 所需解锁 = 植物类型到解锁映射[植物类型] 如果已解锁数量(所需解锁)不无法识别或无法翻译,已删除。= 初始世界大小 - 1: 移动(北方) 如果当前无人机ID不等于最大无人机数且当前Y坐标不等于初始世界大小 - 1: 生成无人机(无人机分类器) 当当前X坐标不等于初始世界大小 - 1时: 如果测量(东方)小于测量(): 交换(东方) 如果当前X坐标不等于0: 移动(西方) 否则: 移动(东方) 移动(东方) 如果物品数量(物品.仙人掌)小于目标数量: 初始世界大小 = 获取世界大小() 仙人掌成本 = 获取成本(实体.仙人掌) 导航至位置(0, 0) 当物品数量(物品.仙人掌)小于目标数量时: 所需南瓜 = 仙人掌成本[物品.南瓜] * (初始世界大小 * 初始世界大小) 如果物品数量(物品.南瓜)小于所需南瓜: 用无人机收集南瓜(所需南瓜) 无人机种植器() 当无人机数量不等于1时: 等待 无人机分类器() 当无人机数量不等于58. 恐龙大师 | Dino Master

一分钟收集100万根骨头 清除() 植物类型解锁映射 = { 实体.灌木: 解锁.植物, 实体.树木: 解锁.树木, 实体.胡萝卜: 解锁.胡萝卜, 实体.南瓜: 解锁.南瓜, 实体.仙人掌: 解锁.仙人掌, 实体.向日葵: 解锁.无法识别或无法翻译,已删除。肥料) >= 1: 使用物品(物品.肥料) 如果使用奇异物质且物品(物品.奇异物质)数量 >= 1: 使用物品(物品.奇异物质) 如果使用水且解锁(解锁.浇水)数量 != 0且获取水量() < 1且物品(物品.水)数量 >= 1: 使用物品(物品.水) 定义准备土壤和种植(植物类型): 当前实体类型 = 获取实体类型() 当前地面类型 = 获取地面类型() 如果植物类型 != 当前实体类型: 收获() 如果植物类型 == 实体.草: 如果当前地面类型 != 地面.草地: 耕种() 否则: 如果当前地面类型 != 地面.土壤: 耕种() 如果植物类型在植物类型到解锁映射中: 所需解锁 = 植物类型到解锁映射[植物类型] 如果解锁(所需解锁)数量 !=无法识别内容,已删除。无法识别或无法翻译,已删除。(get_pos_y() < 初始世界大小 - 偏移量 - 1)且(get_pos_x() > 0)且(get_pos_y() % 2 == next_y % 2)且(偏移量 < 初始世界大小 / 4):执行行内移动(北,1)否则:若行_y % 2 == 0:执行行内移动(东,(初始世界大小 - 1) - get_pos_x())否则:目标左移步数 = get_pos_x() - 边界 若目标左移步数 > 0:执行行内移动(西,目标左移步数)若i不等于行数: 执行行内移动(北,1) 执行行内移动(西,1) 执行行内移动(南,初始世界大小 - 1) 若物品数量(物品.骨头)< 目标数量: 清空 初始世界大小 = 获取世界大小() 苹果成本 = 获取成本(实体.苹果) 当物品数量(物品.骨头)< 目标数量时: 所需仙人掌 = 苹果成本[物品.仙人掌] *(初始世界大小 * 初始世界大小) 若物品数量(物品.仙人掌)<所需仙人掌数量: 独自收集仙人掌(所需仙人掌数量) 关闭=否 下一个X坐标=0 下一个Y坐标=0 长度=0 偏移量=0 边界=1 向东移动1步 更换帽子(帽子.恐龙帽) 当关闭=否时: 阈值=初始世界大小×2 如果长度>(阈值-8)+(偏移量×(初始世界大小-2)): 偏移量+=1 如果偏移量<初始世界大小/16: 阶段1() 否则: 阶段2() 用无人机收集骨头(1000000000000) 59. 迷宫大师|Maze Master

收集200万金币/分钟 | 1分钟内收集200万金币 定义导航至位置(目标_x, 目标_y): 世界大小 = 获取世界大小() 当前位置_x = 获取位置_x() 当前位置_y = 获取位置_y() 水平距离 = (目标_x - 当前位置_x) % 世界大小 垂直距离 = (目标_y - 当前位置_y) % 世界大小 如果 水平距离 < 世界大小 // 2: 循环 水平距离 次: 移动(东) 否则: 循环 (世界大小 - 水平距离) 次: 移动(西) 如果 垂直距离 < 世界大小 // 2: 循环 垂直距离 次: 移动(北) 否则: 循环 (世界大小 - 垂直距离) 次: 移动(南) 定义使用无人机收集金币(目标数量): 定义无人机工作函数(): 宝藏数量 = 0 当前无人机ID = 无人机数量() - 1无法翻译的内容已删除无法翻译,已删除。