换一换
换一换 





A hopefully helpful guide on setting up the Saitek X-56 Rhino H.O.T.A.S. We will be setting things up so that moving the stick left and right will SMOOTHLY ROLL the ship, and roll it faster the further you move it (so not just max roll speed with any movement), moving the stick forward and back will naturally pitch (up and down rotation) the spacecraft, and twisting the stick will yaw (left and right rotation on the horizontal plane. It's how the ship steers in the base game.). This will utilize as many buttons as you like, though there isn't all THAT much for them to do. This will be a bit tedious but quite rewarding, especially for you VR players. The First Bit I made a YouTube video on this, check it out for help! https://youtu.be/iORUGl_oYf0 This is VERY long, but a lot of the length is just very detailed explanations of things. You can feel free to skim over sections that seem obvious, the pictures should guide you. I wrote most of this guide before realizing that when you hold down an input from a controller, any keyboard inputs become jittery. This is fine for our purposes, but some of this guide will end up going back on itself. I highly recommend doing the Setting Up XOutput section BEFORE you do the Setting Up The X-56 Software, and bind as many buttons to controller buttons as you can. Especially buttons you use often. I'm sorry for the inconvenience. This section can be skipped, and I will try to make it so that it can be efficiently completed by people of all skill levels. Things marked in "(...)" parentheses will be elaborations that experienced people can skip. If you are proficient in this kind of thing you can probably just scroll through and follow the pictures for the most part. (except probably some of the "Setting Up The X-56 Software" Sections) You will have to restart your computer a couple times. So just be ready for that. These links will be linked later when they are relevant. This is just a list of them all for convenience. Links: The X-56 user manual.[www.logitech.com] Might be nice to have this on hand. This is a PDF. X-56 Software.[support.logi.com] This is the absolute backbone of this project. This is very very required. XOutput.[github.com] This too is necessary, although there are alternatives. DirectX.[www.microsoft.com] ViGEmBus.[github.com] So this is technically deprecated but as of now it works all the same. Check the XOutput github for successors. ViGEmBus github.[github.com] .NET.[www.microsoft.com] We'll get to all of this in a bit. Visual Studio redist.[learn.microsoft.com] .NET 7[dotnet.microsoft.com] (This may or may not apply yet) Credit to this "Logchain76" guy on Reddit where I found the picture of the ship that I used: Reddit post. The Steps This is what you will be doing. More detail in the various guide sections. Certain items will be in BOLD. if you already know how to do them, you probably did it right and don't need to check the guide sections. If you don't know how then go to the guide section for it. Others will be UNDERLINED ITALIC. These items may be the source of your issues if you did them yourself. Check the guide sections for troubleshooting. Purchase, unbox, and have X-56 H.O.T.A.S. (This is here for people without this exact thing. Check the guide section if you are using something else.) Install X-56 H.O.T.A.S. software. Install ViGEmBus. Install DirectX. Install Visual Studio redistributables for 32 and 64 bit. Install .NET Framework 4.5.2. (You will need to restart your computer after this.) Install XOutput. (Github is hard to use if you don't know what you're doing) Grab a controller if you have one. (I'll explain in the guide) Set up your throttle and stick in the X-56 software. (This is where it gets fun) Set up your throttle and stick in XOutput. Set up steam and in-game settings. Profit! (Optional) The X-56 H.O.T.A.S. This can be skipped if you have an X-56. If you get confused about what an axis is or why certain things look different than they are, you should read the second half of this which explains how axis and buttons work, and what is a button and what is (has) an axis. This guide is specifically tailored to people who have the Saitek X-56 Rhino H.O.T.A.S. (Hands On Throttle And Stick). If your H.O.T.A.S. is not this exact same one, you might still be able to get some use out of this guide. This will become important in the section "Setting Up The X-56 Software". The X-56 comes (You gotta download it seperately) with some software that makes rolling the ship smoothly and 'seamlessly' (This is a play on words, more on that later.) possible. Your hardware may very well come with similar software available to it. If so, I may not be able to help you set it up, but setting it up similarly may very well lead to the same results. I will be pretending you have an X-56 for the most part though as that is what I have and the only thing I know how to do. I won't actually go into a lot of detail on the unboxing of the X-56, however there is a Manual[www.logitech.com] available which carried me through a large portion of the section "Setting Up The X-56 Software". (This, and trial and error) For anyone new to this, the X-56 has two pieces, the throttle and the stick. The throttle is the thing with the two connected levers that move forwards and back, and the stick is the vertical one that moves left-right, forward-back, and twists side to side. These all also have a variety of buttons, as well as both of them having a small joystick on them. Both the stick and the throttle use two different things: axis and buttons. An axis can tell the precise location of a joystick (or anything else) along a line, and a button is either on or off and there is no in-between. Something that moves in a 2D space like a joystick will usually use two axis, and find your point along both lines to tell where on a 2D plane. As far as the computer is concerned, you're moving one stick along one axis and a second stick along a second axis any time you move a joystick. The stick moves along 3 axis, the forward-back axis (the "Y" axis), the left-right or side to side axis (the "X" axis), and the twist axis (the "Z" axis). It has a small joystick halfway up which has it's own two X and Y axis (left-right and up-down axis). The throttle moves along one axis (In this case it is the "X" axis, as it is it's only axis). It also has four "dials", two of which can click in. The dials themselves act as a single axis of movement, and the clicking acts as a button. There are also a variety of buttons and switches and one slider. The buttons are of course obvious, but it may not be as obvious that the switches act as two separate buttons rather than as an on-off switch. These switches, when pushed up, act as a button press, and when pushed down, act as a completely separate button press. The one slider acts like you might expect an on-off switch to, where moving it forward continuously holds down a button and only releases once you move it back. On the top of the stick there are 3 joystick looking things that are NOT joysticks, but rather act as 4 buttons (Or 8 using the software, the rest of this assumes it's set as 4). There are also two of these on the side of the throttle. These will click as you move them around rather than smoothly moving. The stick and throttle have no idea how far you are pushing these, even though they move like a joystick. They only know the direction in which you are pushing the "joysticks". These four buttons can be combined into 8 different combinations, with moving up, down, left, or right just acting like a D-Pad (four directional buttons on a controller), and pushing it into a corner triggering both a vertical and horizontal button, such as moving it to the top left corner will activate BOTH the UP and the LEFT buttons. It is not it's own unique button. Installing X-56 Software Go to the X-56 manual page[www.logitech.com] and follow their instructions for setting things up. I will also be running you through the process. You will want to make your way to the software download site[support.logi.com] and pick the right download for you. First you will want to know if you have a 32 or a 64 bit operating system. It is probably 64 bit, but (this is for windows) go to your computer settings, then find your system settings,
然后找到你的【关于】部分
然后在“设备规格”下方找到“系统类型”,你将看到你的操作系统以及它是32位还是64位。
如果遇到问题,可以忽略该部分,直接下载64位版本。当你尝试安装时,系统会提示你是否需要32位版本(如果确实需要的话)。进入下载页面后,

浏览所有选项,找到针对你的版本且发布时间最晚的那个。
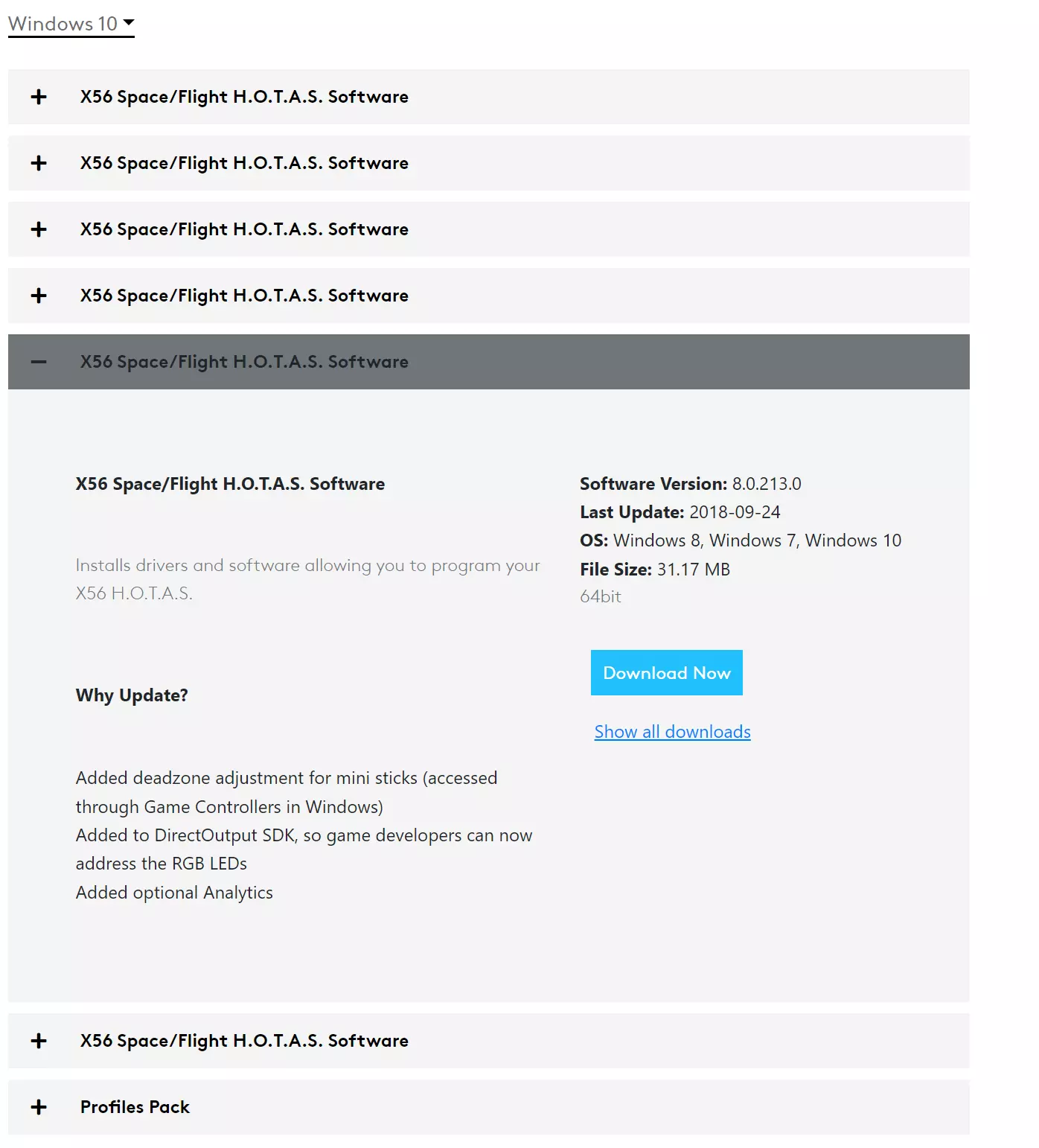
这个问题曾经困扰过我,或许也会困扰你。 下载完成后,运行.exe文件,它会引导你完成设置。(主要就是同意协议,以及启用或禁用“自动帮助改进罗技产品”选项。我选择了禁用。) 安装ViGEmBus 前往相关网站查找ViGEmBus安装程序的下载链接。

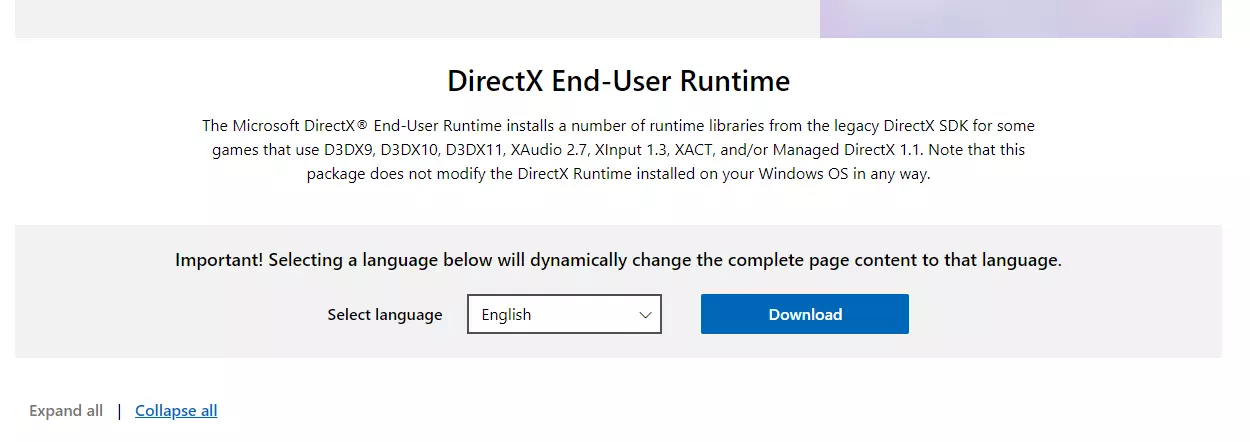
点击以“.exe”结尾的蓝色链接进行下载,然后运行该文件,它将引导你完成安装。 安装DirectX 在官方网站下载DirectX安装程序。
然后运行.exe文件,它将引导你完成安装。 安装Visual Studio可再发行组件 你需要了解自己处理器的架构,这可以在查看操作系统位数的相同位置找到。有关更多详细信息,请参阅“安装X-56软件”部分。
然后你需要前往该网站并下载你的电脑所需的版本,无论是ARM64、X86还是X64。
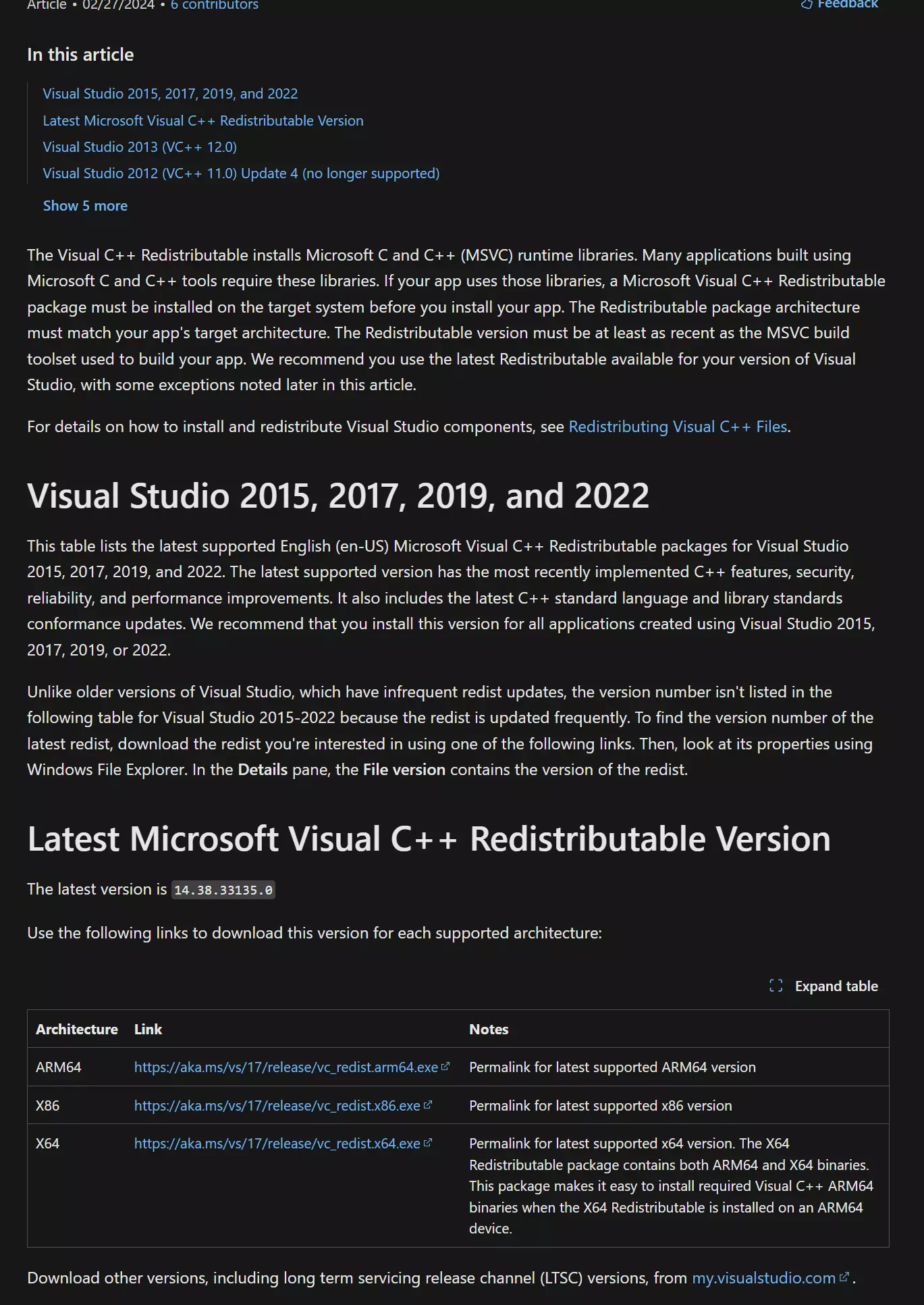
运行可执行文件(.exe),它会引导你完成设置。 安装.NET框架。 适当休息(非必需)。 简单来说,如果你清楚操作流程,可下载.NET 4.5.2或在XOutput 4.x版本发布后下载.NET 7,然后运行安装程序。
查看4.x版本是否已发布。
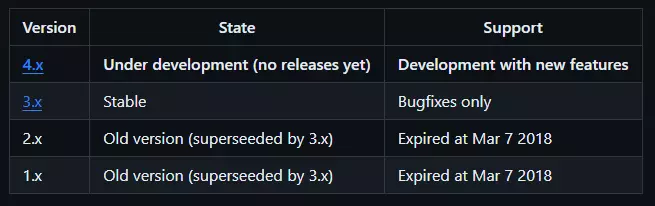
如果已发布,你需要下载.NET 7而非.NET 4,相关页面应会提供链接,若没有你也可以自行搜索。这是微软的产品。 如果尚未发布: 前往相关网站下载.NET安装程序。
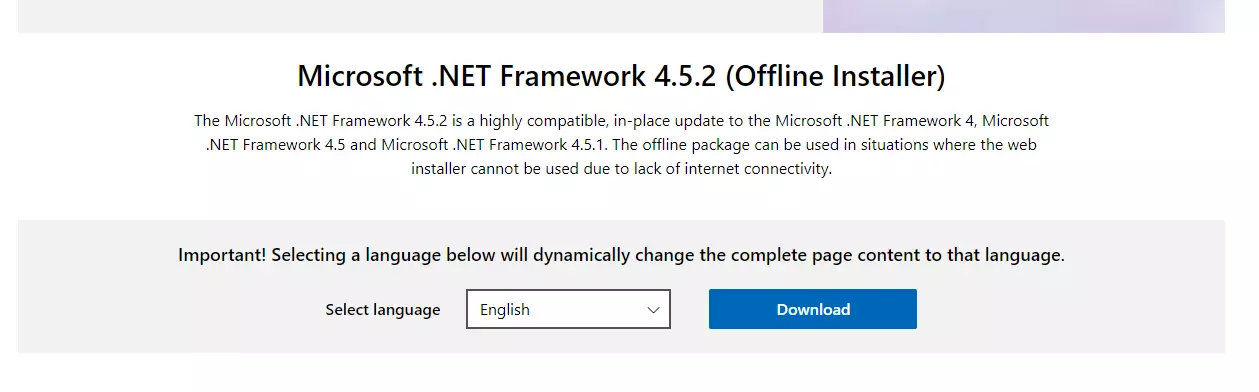
运行此.exe文件,它将引导你完成安装过程。安装完成后,可能会提示你重启电脑,这是必要步骤,建议尽快重启。重启前请保存所有打开的内容,之后你需要重新找到本指南。 如果【.NET 7】已发布:按照安装【.NET 4】的方式安装【.NET 7】,安装后仍需按上述说明重启电脑。 安装【XOutput】:强烈建议在进行此步骤前重启电脑。 如果你清楚操作流程,可直接下载GitHub上的.zip压缩包并解压到任意位置。 如果【XOutput 4.x】版本已发布,你需要参考GitHub页面上的指南,其安装步骤可能与3.x版本不同。如果你正在安装3.x版本,恭喜你已完成更新! 如果尚未更新,请下载压缩文件。操作步骤如下: 1. 点击“<>Code”按钮 2. 点击“Download zip” 请参考图片进行操作。
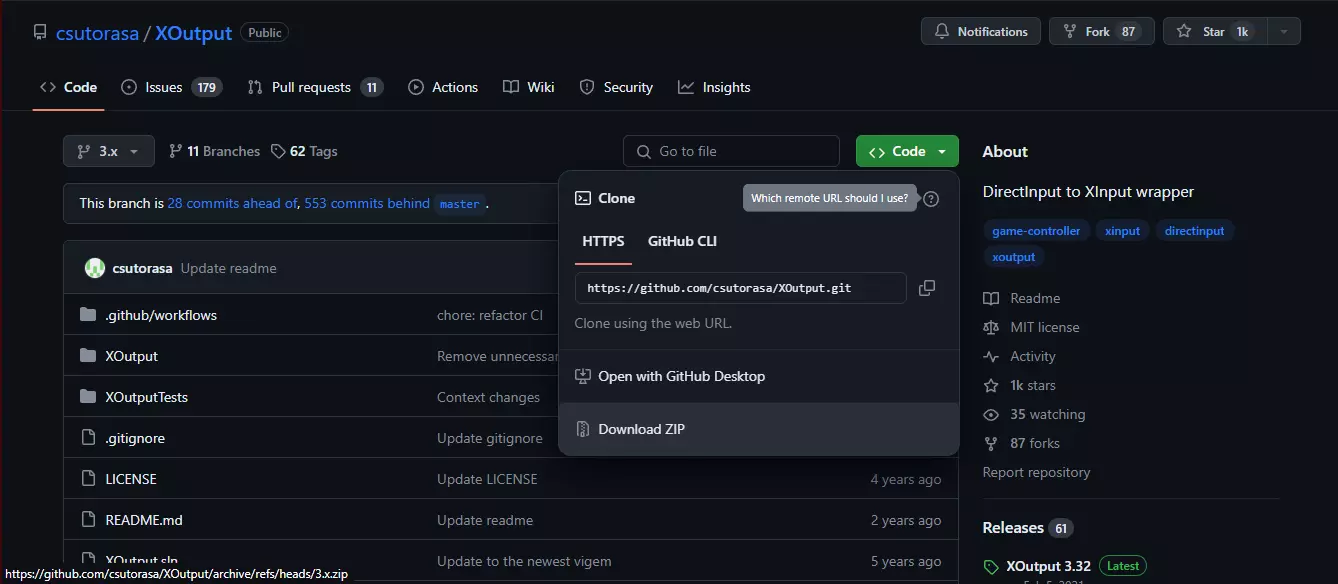
代码按钮
无法识别内容,已删除。
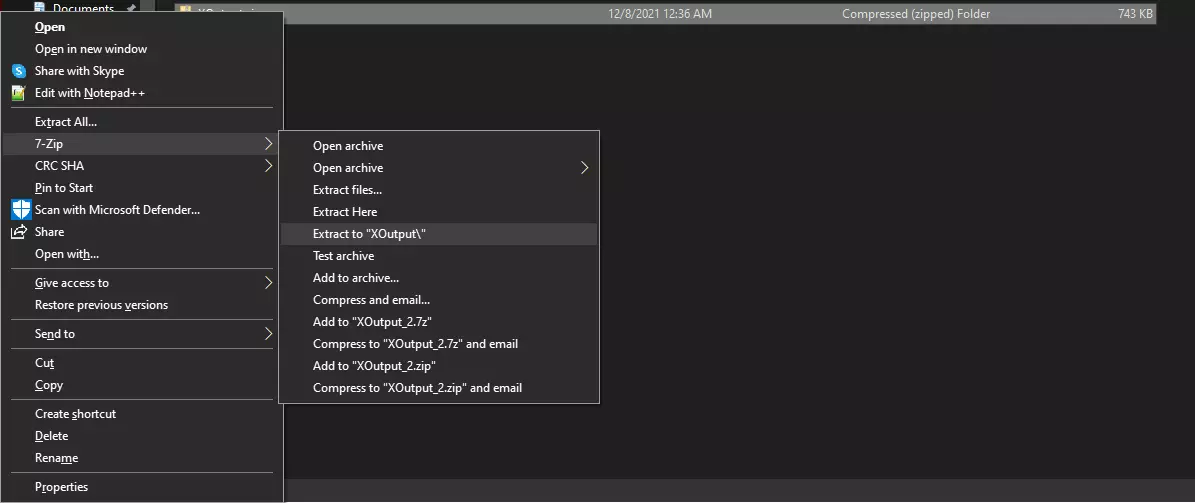
这不是一个.exe文件。它需要第三方应用程序来进行相关操作。我认为Windows 10默认可以处理这类文件,但拥有专门的第三方应用程序会更方便。【7-Zip】和【WinRAR】是广受欢迎的选择。【WinRAR】严格来说是付费应用程序,但实际上并不限制用户免费使用。免费使用它甚至成了一种流行的梗。 你需要将此文件解压到任意位置(该压缩包内包含一个.exe文件,你需要将其放置在压缩包外部)。如果在Windows系统上不使用任何外部应用程序(我不太确定,可能是因为我安装了相关软件才具备此功能),你可以双击下载的.zip文件,然后会看到相关内容。
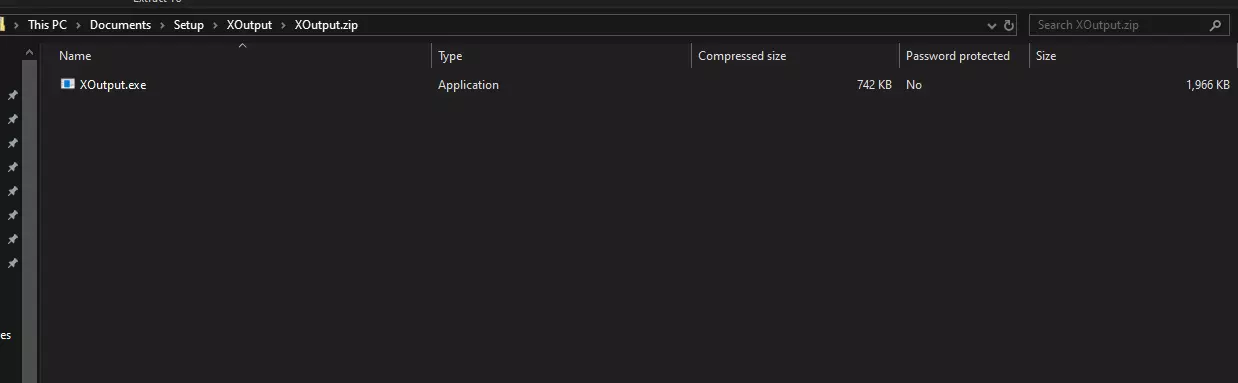
右键点击“XOutput.exe”文件,然后点击复制(或者也可以先单击该文件,按住Ctrl键再按C键,这两种操作效果相同)。 现在你可以选择任何位置来存放这个文件。可以放在桌面(不推荐),或者在文档中新建一个文件夹(在空白处右键点击,通过右键菜单操作),将其命名为类似“XOutput”的名称,然后双击打开该文件夹。接着,在文件夹的空白处右键点击并选择粘贴,或者将鼠标悬停在空白处,按住Ctrl键再按V键,这两种操作效果相同。 这样就能将.exe文件放置到该位置了。如果你正在使用7zip之类的应用程序,只要它已安装(可能需要重启电脑),你可以右键点击压缩文件,将鼠标悬停在7zip选项上,然后选择【解压到[文件夹名称]】。
这将在压缩文件所在位置自动创建一个文件夹(如果未更改设置,该文件夹可能位于下载文件夹中),此文件夹内会包含解压后的可执行文件。 解压完成后,双击该可执行文件即可运行。你也可以右键点击解压后的可执行文件,选择创建快捷方式,然后从文件资源管理器中将其拖拽到桌面。 关于使用控制器(此步骤为可选): 如果你尚未尝试,建议先用控制器操作飞船一段时间,熟悉常用操作,并规划在新设置中如何进行这些操作。例如,你可能会想将开火武器按钮设置为摇杆上的扳机键,而那个小指扳机键或许可以设为着陆/离舰按钮。 值得注意的是,在一定程度上(假设你使用的是X-56,或者你的其他双手摇杆节流阀系统的应用程序支持),你可以比游戏控制选项中“重新映射控制”部分所提供的功能,更进一步地自定义你的双手摇杆节流阀系统按钮。 这部分内容比“下载并运行程序”要复杂一些。 我强烈建议为XOutput创建一个快捷方式。你需要在启动无人深空之前运行它,这一过程可以自动化。有一个复选框可以设置该应用程序在Windows启动时自动运行。我会在【设置XOutput】部分详细说明这一点。设置X-56软件 这部分操作稍显复杂,却是确保滚转功能正常工作的核心步骤。继续操作前请重启电脑。 安装X-56软件后,桌面应会生成一个快捷方式。

双击此文件即可打开应用程序。
点击此按钮进入编程菜单。

我们将从编程摇杆开始,所以请点击摇杆图像按钮。
有关此流程的更多信息,请查阅手册。你可能需要为【无人深空】创建自己的配置文件,因此请点击蓝色保存图标旁的黑色三角形,然后点击另存为,或者你可以按住CTRL键并点击A键,这两种操作效果相同。
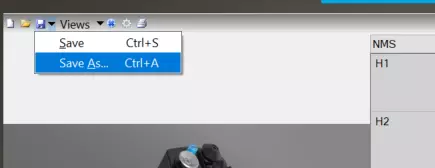
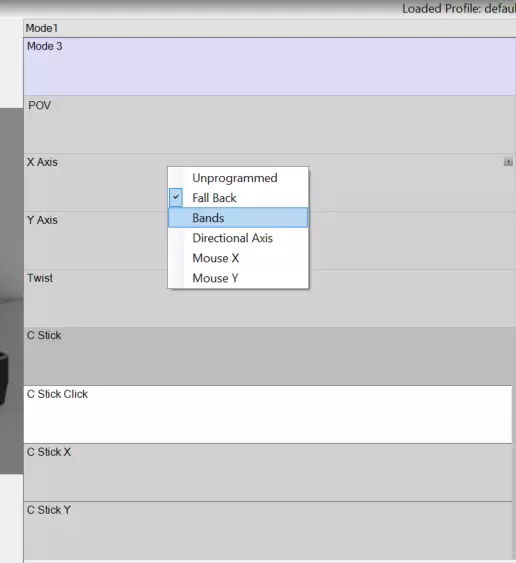
你可以将个人资料命名为任何你喜欢的名称,例如简单的NMS、无人深空,或者你也可以命名为Fluffybutt,这完全取决于你。在此处,你可以通过按住CTRL键并点击S键,或者点击蓝色的保存图标(不是旁边的黑色三角形)来保存到此个人资料。 接下来的操作会变得复杂一些,因为你可能希望根据自己的需求自定义个人资料,所以你的操作体验可能会与我的有所不同。 你可以不必阅读此段: 你可以沿摇杆的任意轴移动摇杆,或按下任意按钮,应用程序中相应的部分会自动高亮显示。你也可以点击摇杆图像中的任意按钮来达到相同的效果。如果你希望X轴(左右轴)控制船只翻滚,需要通过设置X轴的不同区间,让其在特定时机按下或不按下某个按钮。你添加的区间越多,控制就会显得越“无缝”。这就是之前提到的文字游戏,因为不同翻滚速度之间实际上存在“接缝”,但只要你现在付出努力进行设置,这些接缝几乎是完全无法察觉的。 要进行此操作,请找到X轴,右键点击它,然后选择“区间”选项。
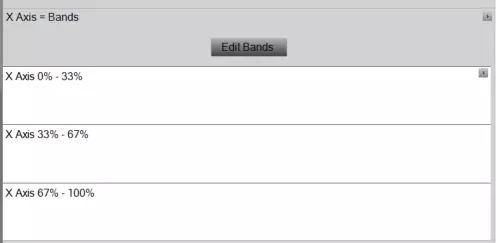
它会自动设置3个区间,但这远远不够。每个方向都需要多个区间,你可以选择保留奇数个区间,这样其中一个区间就会成为死区。这是可选操作。要添加更多区间,请点击【编辑区间】按钮。
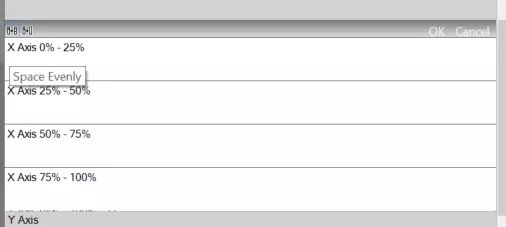
如果你点击频段的中心位置(垂直居中,左右偏移无关紧要),会看到一个带线条和箭头的黑色光标,它会将该频段一分为二。当你将鼠标悬停在两个频段之间的线条上时,可以看到一个上下指向的白色箭头,拖动该箭头可以调整相连频段所占的百分比。不过我们(可能)不会这么做。你需要添加很多频段。我设置了17个频段,其中8个在0%到47%之间,1个死区,8个在53%到100%之间。我还将死区调整为48%到52%。建议你至少在两侧各添加4个频段,总共8个,但添加的频段越多,最终效果可能会越好。当你放置好所有频段后,在频段编辑区域的左上角有一个类似“H”形状的按钮。将鼠标悬停在该按钮上会显示“均匀分布”,点击此按钮即可将你创建的所有频段均匀排列。
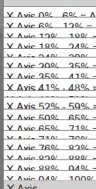
请务必点击确定。我的最终界面就是这样,看起来相当复杂。
好的,现在你已经设置好了你的频段,接下来我们要做一点小计算。你需要记下每一半可用的频段数量,比如我的每边是8个,记住这个数字。 我建议从0%频段开始。在两个极端频段(0%和100%频段)上,点击频段,然后在0%频段上按A键,在100%频段上按D键。应该会显示成这样。

然后你应该点击绿色对勾,此时会提示你为其命名。你可以不命名,但我建议将其命名为你输入的字母。 如果你不小心在不需要的频段上创建了按键操作,可以右键点击该频段并将其设置为【无操作】。
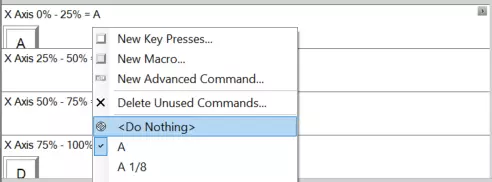
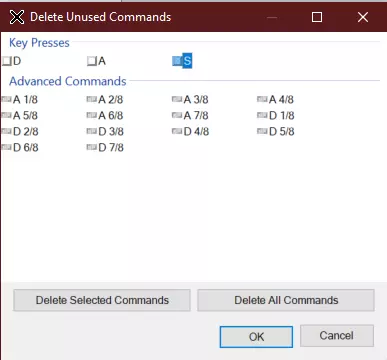
然后你可以右键点击任意乐队,选择【删除未使用命令】,而你创建的多余命令可以通过点击选中它们,然后点击【删除所选命令】来删除。
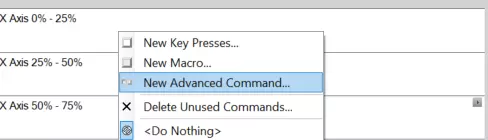
一旦将两个端点设为A和D,你就需要设置它们之间的所有频段。 (参见第二部分末尾的简明摘要) 你还记得那个数字吗?就是每一半的频段数量。现在要用到数学运算了。在0%频段正下方的那个频段上,右键点击并选择【新建高级命令...】
你可以将其命名为“A [x]/[y]”(并非必须如此命名),其中“[y]”是每半部分的带子数量。例如,如果你有13条带子,那么每半部分会有6条,同时有1个空白区域。“[x]”则比该数字少1。所以对于6这个例子,你可以将其命名为“A 5/6”。我的命名是“A 7/8”。在“Repeat”(重复)区域内,点击该区域然后按“A”键。点击第一个嵌入式的“A”使其变为蓝色,然后右键点击它。点击“Set Delay”(设置延迟)。
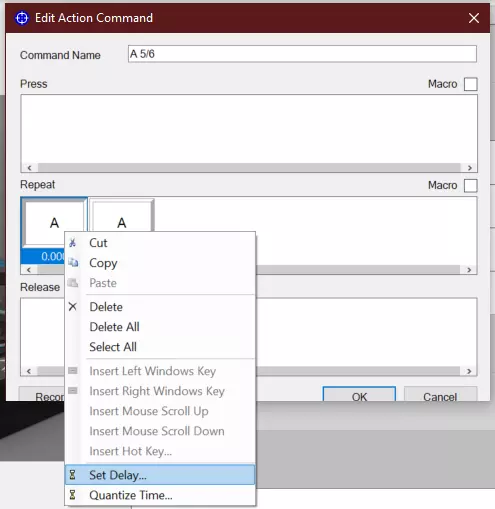
更多数学计算。因为我有8个频段,所以我在鼠标抬起和按下之间分配了0.080秒。你可以尝试任何数字,但我强烈建议这个数字能被你每半部分的频段数量整除。如果你有6个频段,你可以分配0.060或0.120秒。设置较短的时间会降低按键被连续点击的明显程度,而较长的时间则会使其更明显。在这些时间尺度上,可能根本不会被注意到,而且如果时间设置得太短,游戏可能难以正确记录你点击的间隔。 经过测试,短于0.020秒的时间似乎无法被游戏识别。要解决这个问题,你可以将时间分配加倍。 关于“分配”的详细说明。对于我的A键7/8指令,我希望A键(虚拟)按下的时间恰好占总时间的7/8(即0.080秒中的0.070秒),抬起的时间占1/8(即0.080秒中的0.010秒)。要实现这一点,你需要将第一个延迟设置为你希望按键抬起的时间,第二个延迟设置为你希望按键按下的时间。在当前菜单中,你应该已经右键点击了第一个A键,并且看到显示为“0.000”。你需要将其设置为你希望分割时间的1/8(如果你选择6段,则为1/6,以此类推)。这就是为什么总时间应该能被你的段数整除。(对于0.080秒的1/8分割,结果是0.010秒;对于0.060秒的1/6分割,结果也是0.010秒;对于0.120秒的1/6分割,结果则是0.而是使用“0.020”,因为“0.120”的六分之一是“0.020”。你可以点击“确定”,然后左键点击第二个A键,接着右键点击该键。这会显示一个“随机”数字,实际上这是你按住该键后松开的时长。你应该将此设置为分割的剩余部分,这也应该是你的命令名称。(以我的A 7/8为例,我分割了“0.080”,所以在第一次使用“0.010”后,剩余时间为“0.070”秒。这也是原始“0.080”的八分之七) X-56软件设置(第二部分) (这些部分似乎有字符限制)
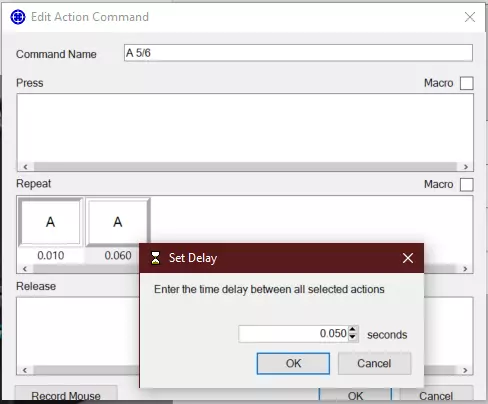
这是它应有的样子。注意,尽管第二个A的延迟为0.050,但显示的是0.060。这是因为显示的时间是所有先前延迟加上当前延迟的累积。这个最后的显示数字在每个频段中都应保持不变。这两个延迟的总和应始终等于你选择的分割时间。点击确定以确认并保存更改。你应该在所有频段中重复此操作,直到达到50%的标记。例如,在A 5/6之后的下一个频段,应创建一个新的高级命令并将其命名为4/6,然后将延迟设置为第一个为0.020,第二个为0.040,总和为0.060。 达到50%标记后,你将开始反向操作,从1/6、1/8或1/[你的频段数]开始,然后逐步增加。从现在开始,你将使用D而不是A。延迟机制保持不变,A 1/6的延迟与D 1/6相同(可能第一个为【0.100】,第二个为【0.020】),然后逐步调整到100%频段上方的那个值。100%频段仍应保持连续的D。我的最终设置就是这样。
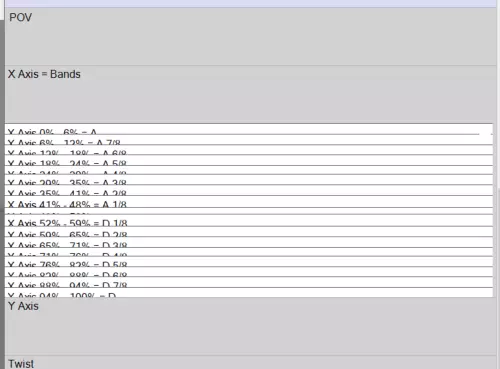
我的延迟数据如下(第一个数字为首次延迟,第二个数字为第二次延迟): A A 7/8 "0.020" "0.140" A 6/8 "0.020" "0.060" A 5/8 "0.030" "0.050" A 4/8 "0.040" "0.040" A 3/8 "0.050" "0.030" A 2/8 "0.060" "0.020" A 1/8 "0.140" "0.020" A 1/16 "0.300" "0.020" 死区范围 D 1/16 "0.300" "0.020" D 1/8 "0.140" "0.020" D 2/8 "0.060" "0.020" D 3/8 "0.050" "0.030" D 4/8 "0.040" "0.040" D 5/8 "0.030" "0.050" D 6/8 "0.020" "0.060" D 7/8 "0.020" "0.140" 并且所有第二次数字下方都显示数字"0.080"。(我写这个的时候还没意识到问题所在><) 滚动部分就这些。接下来,你可以按住CTRL键然后按S保存配置文件,之后点击【配置文件】按钮。它看起来像一个带有十字准星的蓝色圆圈,位于保存图标附近和“查看”一词旁边。
然后点击【测试配置文件】按钮。该按钮图标为齿轮形状,位于【配置文件按钮】旁边。
可能很难注意到时间差异,因为它会每0.080秒循环切换按键的输入与释放,但按键被按住的时间确实会发生变化。左右移动操纵杆,你应该会看到A和D按键的输入显示。当你将操纵杆完全推到边缘时,它会停止反复快速按下和释放按键,而是暂停一秒钟,然后以蓝色显示的字母进行连续输入。如果没有任何反应,可能需要重启电脑。我自己也遇到过这个问题。 你也可以打开无人深空并进入飞船。你需要使用控制器或键盘来起飞和控制飞船,但左右移动操纵杆应该会根据你推动操纵杆的幅度使飞船进行翻滚。以下是刚才所有操作的简要说明: 右键点击从0%频段正下方的频段开始的各个频段,添加高级命令。 将其命名为“A x/y”,其中y是之前让你记住的数字,即总频段数的一半,若频段数为奇数则忽略中间的死区频段。x比y小1。例如,我有17个总频段,每半部分为8个频段,我的命名是“A 7/8”。现在点击重复框内部并点击A键。先左键点击,然后右键点击第一个A键,选择一个能被你应该记住的频段数整除的命令总执行时间。数值越小越好,但过小可能会导致问题。我选择了“0.080”。对于“A 7/8”频段,我分配了“0.”将第一个延迟设置为0.100秒,然后通过先左键点击再右键点击第二个延迟,将其设置为0.070秒。第二个延迟应占你总分配时间的X/Y。从现在开始,为你发出的每个其他命令分配相同的总时间(例如0.080秒)。点击确定保存所有设置。右键点击下一个频段并重复此过程,但递减X值,直到达到“A 1/y”,每次都应调整延迟,使第二个延迟占总分配时间的X/Y,第一个延迟则为剩余时间(例如,6/8位置的频段应设置为第一个延迟0.020秒,第二个延迟0.060秒)。如果你有奇数个频段,请将中心死区频段留空。现在你需要反向操作,50%区间之后的下一个区间将开始递增,并使用D。从“D 1/y”开始递增,直到达到“D x/y”,这应该是100%区间前的最后一个区间。A分数和D分数的时间设置相同。你可以点击左上角带十字准星的蓝色圆圈,将配置文件应用到你的摇杆上,这样你就能在游戏中用摇杆控制飞船滚转了。 接下来我们会调整灵敏度。 X-56软件设置第三部分 接下来的步骤会比设置滚转简单得多。 你可能会注意到,要进行精确的滚转操作,似乎只需要稍微移动摇杆即可。如果你每半区设置的频段数量很少,可能会注意到可滚动的速度档位也很少。这一点不增加频段数量是无法改变的,但另一部分可以调整。你可能会发现,从两个频段之间的中心位置(或者如果你设置了死区频段,就是从死区频段)开始,按某个键的时间占比是1/Y(例如,离中心最近的第一个频段按A或D键的时间占比为1/8)。下一个频段则是2/Y,按该键的时间占比是前者的两倍。只需小幅移动,滚动速度就会翻倍。如果你喜欢这种设置,可以保持不变;但如果你想调整,不必改变时间设置。简而言之,现在你可以确保配置文件已保存,然后进入设置菜单。

点击摇杆图标
它应该看起来像这样,但带有一条直线。

如果你懂这类操作,可以不用看这段说明。 在此菜单中,右侧有一个表格,表格下方有滑块。移动这些滑块可以调整其上方对应字段的值。你也可以点击这些字段直接输入数字,这会一次只调整一个轴。你可以设置死区(这里称为死区范围),这样如果还没有设置死区范围,摇杆稍微偏离中心时就不会触发横滚。这个数值的范围是0到1000,所以设为10就是1%的死区,设为100则意味着需要将摇杆移动其全量程的10%才会开始触发任何操作。我建议将其设置得低一些,比如2%(20)。曲线会影响摇杆在距离中心特定位置时的灵敏度。若曲线在中心附近呈水平平直状态,在边缘处向上或向下弯曲,则摇杆在中心附近灵敏度较低,在边缘处灵敏度较高。曲率数值大于500时,这种效果会更明显。曲率数值小于500时则效果相反,会使摇杆在中心附近灵敏度更高,在边缘处灵敏度更低。如果这样说不太好理解,那么将曲率数值设为500以上意味着,当摇杆靠近中心时,你需要移动得更远才能察觉到【区间】的变化(就好像区间变少了一样)。当操纵杆靠近边缘时,无需移动太远就能切换档位(就好像边缘有更多档位一样)。 这让你在操纵杆靠近中心时能进行精细的滚转操作。如果将数值设为500以下,中心附近的任何微小移动都会使飞船快速滚转,难以进行精细的滚转控制。但如果数值设置过高,你几乎要将操纵杆推到边缘才能让飞船有明显的滚转,而且在中心附近档位感会更明显。记得点击应用,设置将保存到所选轴。我偏好的设置是死区20,曲率750。你可以进一步调整并编辑中心附近频段的时间,使其更加精细,例如从A 1/32开始,然后是A 1/16、A 1/8、A 2/8、A 3/8等等。这样可以实现非常精细的移动,但过程会繁琐得多,而且频段大小必须设置得非常小,或者需要调整曲线,这两种操作都不太有趣。 除非你想进一步调整,否则滚动设置就到此为止。接下来,我们将在X-56软件中设置按钮。返回编程菜单。
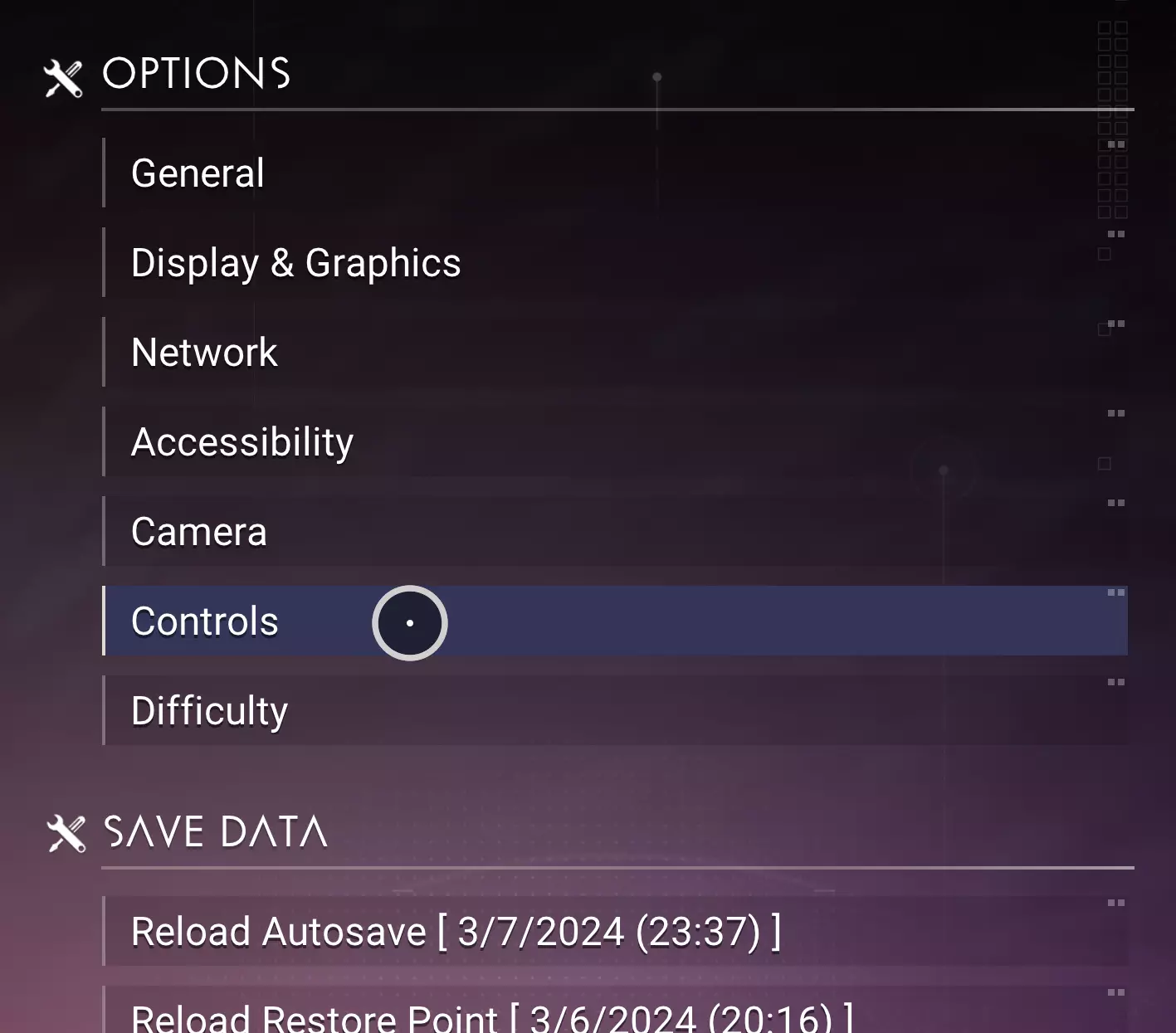
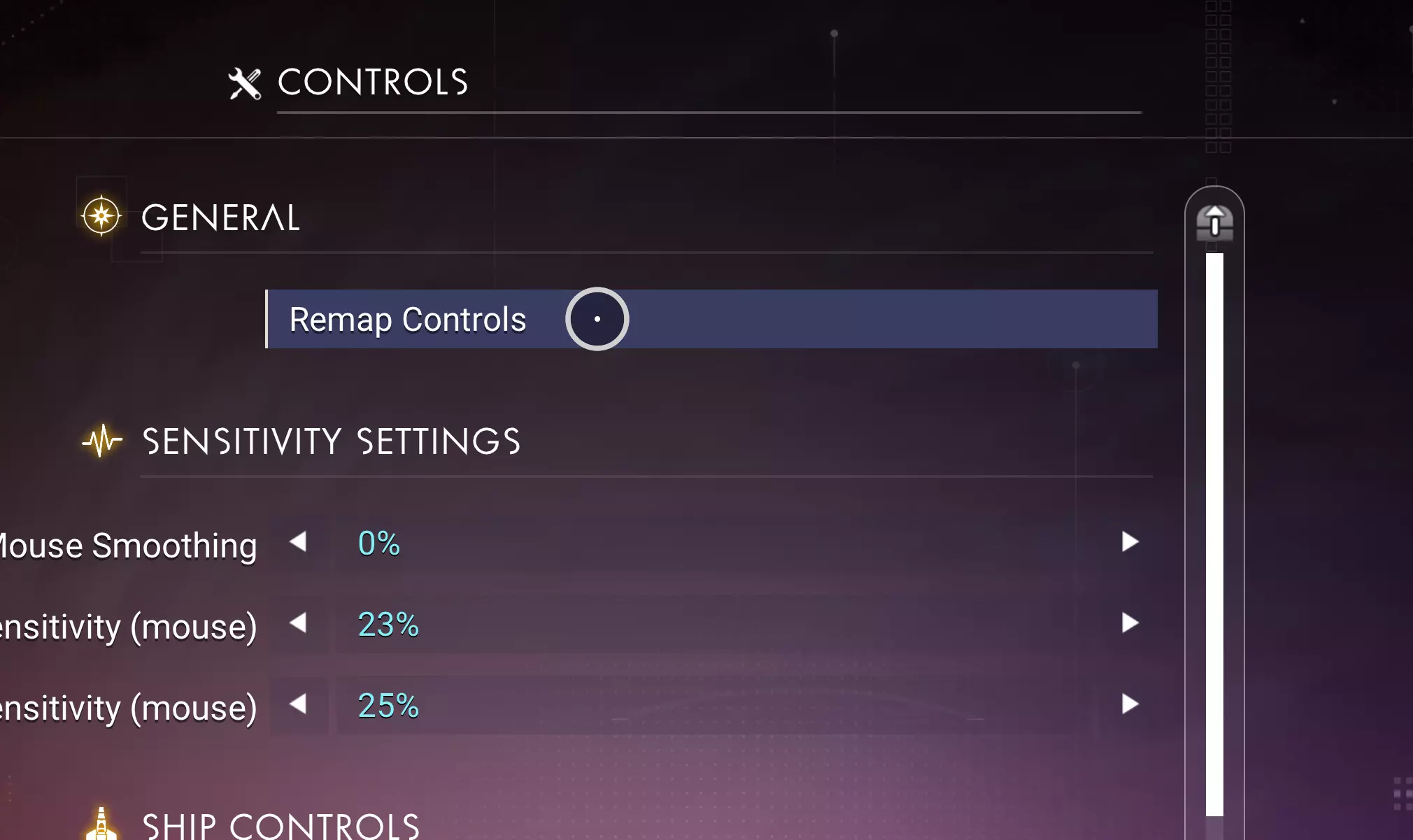
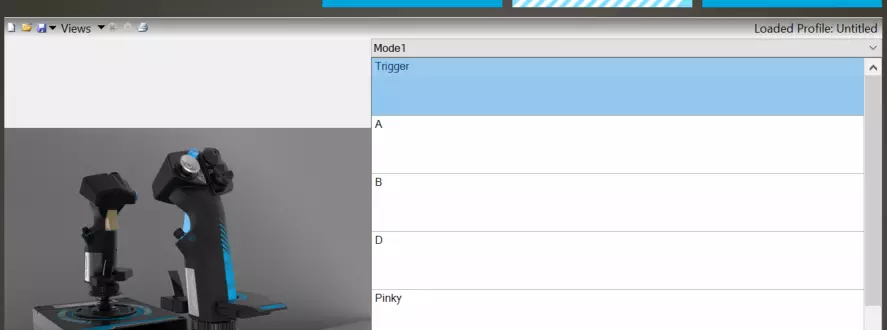
接下来,你需要考虑每个按钮的功能,或者换个角度想,每个可能的操作应该分配到哪个按钮上。你有足够的按钮来使用和导航快捷菜单。现在我们就要为这些按钮进行设置。不必局限于摇杆或油门,你完全可以将摇杆上的一个按钮和油门上的一个按钮设置为执行相同的操作。我们先从《无人深空》键盘的基本可用操作开始。每个操作都分配了一个按键,并且可以随意更改该按键。进入游戏选项,选择控制,然后选择重新映射控制。
然后使用【视角控制】下方的三角形切换到【飞行控制】部分

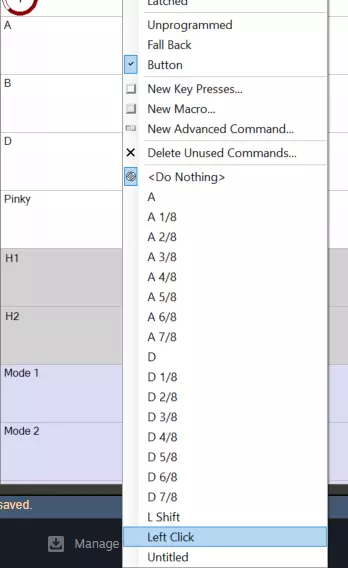
以下是30种不同的按键绑定列表,其中一些比其他的更重要。你会注意到像“离开飞船”和“降落飞船”这样的按键被设置为同一个键。如果你打算将H.O.T.A.S.上的“离开飞船”按钮和“降落飞船”按钮设为同一个按钮,那么这样设置非常合适。但如果你计划将它们设为不同的按钮,就需要将其中一个控制功能分配给新的键盘按键(这并非严格要求。你仍然可以将E键同时设为“离开飞船”和“降落飞船”,同时在H.O.T.A.S.上为这两个功能设置不同的按钮。你也可以为操作设置完全自定义的按键组合。我将在“设置XOutput”部分介绍该过程。)或许值得写下或记住(如果还没记住的话)每个操作对应的按键(此处鼠标按键也算作键盘按键)。 如果不想更改键盘按键绑定,且多个操作存在冲突的按键绑定,现在可以暂时跳过这些特定操作,我们将在【设置XOutput】部分介绍它们。有条理地检查每个你想设置到摇杆按钮上的操作。对于每个操作,在设置中查看该操作绑定的按键。例如,【开火武器】绑定的是【左键点击】。

现在你可以点击实际的按钮(在物理摇杆上),或者用鼠标点击图像中你想要绑定该操作的按钮。以我为例,我想将扳机键绑定为“开火武器”,所以我会点击真实的物理扳机键,此时右侧的扳机键区域会以蓝色高亮显示。你也可以点击图像中的扳机键,或者镜像图像中的扳机键(从这张图中可以看出我点击了镜像扳机键,因为它在图像中呈橙色高亮)。
你需要点击该部分(在本示例中是我们标蓝的触发部分),之后会提示你输入按键。输入游戏按键设置中你想要绑定的动作所对应的按键。(例如,我在游戏中为“开火武器”这一动作绑定的按键是“左键点击”)。在尝试输入任何鼠标点击按键绑定之前,你需要先点击红色X下方的小鼠标图标。将鼠标悬停在该图标上时,会显示“记录鼠标操作”。

然后你可以在该区域输入鼠标点击,再次点击鼠标图标即可停止录制鼠标点击。鼠标点击会显示为一个红色圆圈,圆圈内有一个数字。数字1代表左键点击,2代表右键点击,3代表中键点击,4代表后退按钮(并非所有鼠标都有此按钮),5代表前进按钮(并非所有鼠标都有此按钮)。

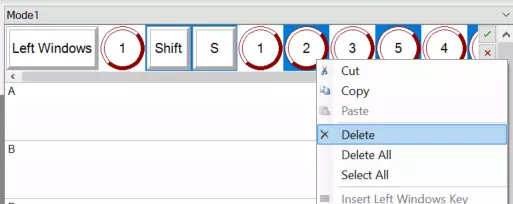
X-56软件设置指南(第四部分) 如果不慎误点或误触按键,你可以(确保“记录鼠标”键处于关闭状态)点击单个按键,使其高亮显示为蓝色。你可以先点击一个按键,然后按住Shift键并点击另一个按键,这样这两个按键之间的所有按键都会被高亮。按住Ctrl键并点击某个按键,可以在选中(高亮)和未选中状态之间切换该按键。以我为例,我先点击第一个按键【LEFT WINDOWS】,然后按住Shift键点击最后一个按键,这样所有按键都会被高亮。之后,我按住Ctrl键并点击【Mouse 3】键,将其取消选中。

你也可以选择(在未选中任何内容的情况下)按住CTRL键并点击每个你不想要的键。然后你可以右键点击任何高亮显示的键,并选择【删除】。
在这种情况下,我只能这样了。

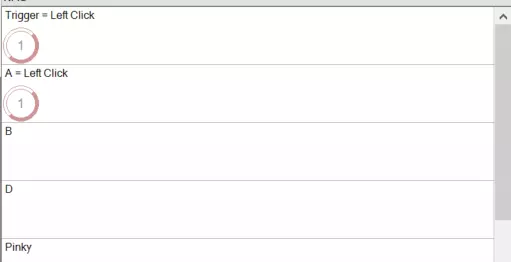
需要注意的是,你的推力和刹车都可以分配到油门轴上,但这需要在XOutput设置中进行。你可以选择将它们设为按钮而非轴(轴位于中间位置时无推力,100%时为全推力,0%时为全刹车),或者设为两个独立的轴(油门轴0%时无推力,100%时为全推力。然后你可以将油门上的任何旋钮或摇杆上的任何轴设置为刹车轴)。你也可以将推力设为轴,刹车设为按钮。 另外需要注意的是,当游戏接收控制器输入时,它会重复发送某些被按住的键盘输入,而不是将其识别为持续按住状态。因此,我建议在此处分配可快速连按的按键,并将诸如加速键之类的按键留到XOutput部分使用。 接下来,我想将扳机键绑定到“左键点击”,而“左键点击”本身已绑定到“开火武器”。为此,你可以点击上方那些图像右侧的红色X,清除之前自己造成的混乱设置,然后再次点击“Trigger”(扳机)字段,启用“Record the Mouse”(记录鼠标),点击一次左键,然后禁用“Record the Mouse”(记录鼠标)。点击绿色对勾保存绑定,系统会提示你为其命名。你应该根据它所设置的按键来命名。如果你想将摇杆或油门上的其他按键绑定到你刚创建的按键绑定(比如我还想将油门上的一个按钮设为开火键),可以右键点击你想要分配的按钮,然后选择你已创建的按键绑定。
然后它会将该按键操作设置到你选择的按钮上,无需再次进行按键设置。
接下来你将继续进行下一项操作的分配。需要注意的是,你的推力和刹车都可以分配到油门轴上,但这需要在XOutput设置中进行。如果你希望推力设为轴,刹车设为按钮,现在就可以设置刹车按钮。 暂时可以忽略任何按键绑定冲突的操作,例如,如果你希望将【离开飞船】和【降落飞船】都绑定到E键,但又想让它们成为独立的按钮(比如油门上的一个开关,向上推用于离开,向下推用于降落),这是可行的。如果你不关心这些操作绑定到哪个按键,可以在游戏中随意更改按键绑定,然后将一个按钮绑定到新的按键上。 选择你接下来想要分配的操作,比如默认的加速(L SHIFT)。我个人在我的油门上进行了这样的设置。油门右侧有一个按钮和一个开关(其功能相当于按钮),两者位置相邻。我将左Shift键同时分配给了这两个控制键,这样一来,如果我需要短时间的推进,只需按下按钮;要是打算长时间保持推进状态,向前拨动开关即可,它会一直维持推进效果,直到我将开关复位。这一设置完全是按照上述步骤完成的。 需要注意的是,【脉冲推进】操作需要同时按下A键和D键。操纵杆无法同时向左和向右移动,因此无法启动脉冲推进。要实现这一操作,我们可以使用一个或两个按钮。我选择了双按钮方案,因为在我看来这样操作起来更有感觉。就我而言,节流阀背面有两个按钮,我将它们绑定到了A键和D键。

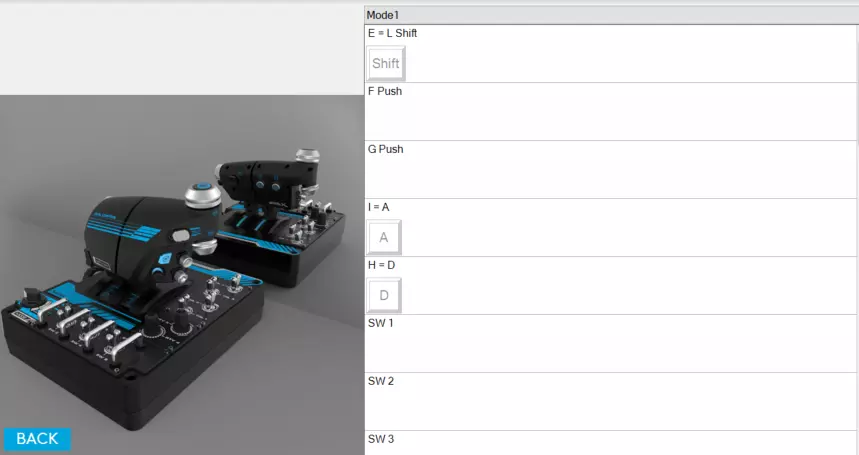
通过这种设置,我可以按住两个按钮来启用脉冲推进。不过这样确实存在误触其中一个按钮导致飞船意外翻滚的小风险,而且如果没有同时按下两个按钮,飞船也会轻微翻滚。 第二种选择是设置空格键按下(默认情况下)。 我的摇杆按键绑定是这样的:(加速、循环飞船动力、上一个目标、下一个目标、战斗自动驾驶、脉冲引擎和循环武器在绑定到按键时会出现抖动。触发键 -> 左键 -> 开火/快速菜单确认 D键 -> Q键 -> 执行扫描(位于小指扳机后方) 小指键 -> E键 -> 着陆/离舰/标记目标 H2上键 -> T键 -> 最近目标 POV上键 -> 上箭头 -> 向上导航 POV下键 -> 下箭头 -> 向下导航 POV左键 -> 左箭头 -> 向左导航 POV右键 -> 右箭头 -> 向右导航 C摇杆按下 -> E键 -> (主要用于在物品栏中移动物品) C摇杆X轴 -> 鼠标X轴 -> 水平控制鼠标(用于物品栏管理) C摇杆Y轴 -> 鼠标Y轴 -> 垂直控制鼠标 油门键位设置如下: F键按下 -> M键 -> 地图(按下顶部旋钮调出地图) TGL 4上键 -> H键 -> 隐藏HUD H3右键 -> 右键 -> 缩放内/退(将上摇杆向远离手掌的方向推可缩放,在菜单中则返回) K1上 -> Tab -> 物品栏 K1下 -> Esc -> 选项 不要忘记将配置文件加载到顶部带有蓝色十字准星圆圈的双手摇杆控制器(H.O.T.A.S.)上。
现在你已经设置好了所有按键绑定,应该能够在游戏中操控飞船翻滚,并执行菜单操作等大多数动作。确保你已保存配置文件并将其加载到H.O.T.A.S(双手操控油门和摇杆)上。 设置XOutput 简单来说,在XOutput中按照你的喜好将油门绑定到扳机键,将旋转功能设为左摇杆的X轴,摇杆Y轴设为左摇杆的Y轴。 这是我们在游戏外需要做的最后一件事。打开你之前解压的.exe文件,应该就能看到相应界面。
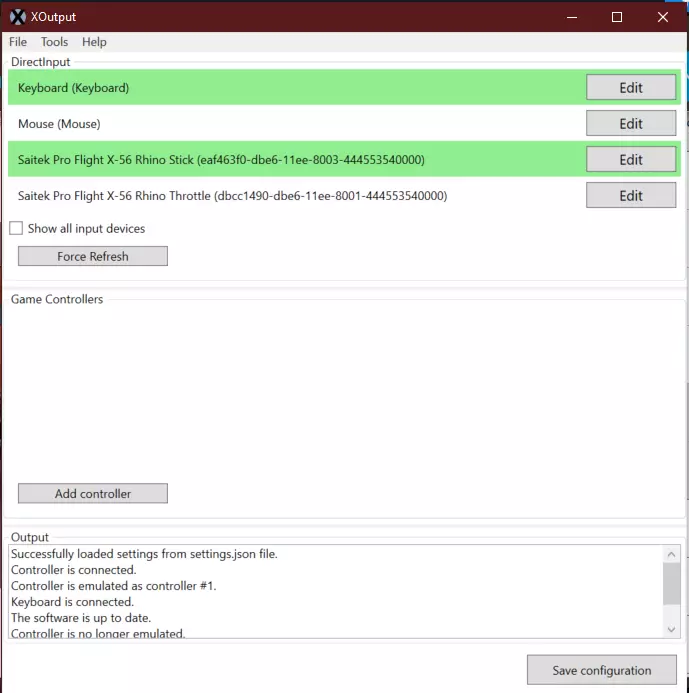
你无需使用顶部区域的【编辑】按钮。点击【添加控制器】
在中间的框中,然后点击你刚刚看到出现的那个控制器上的“编辑”。
从该界面:
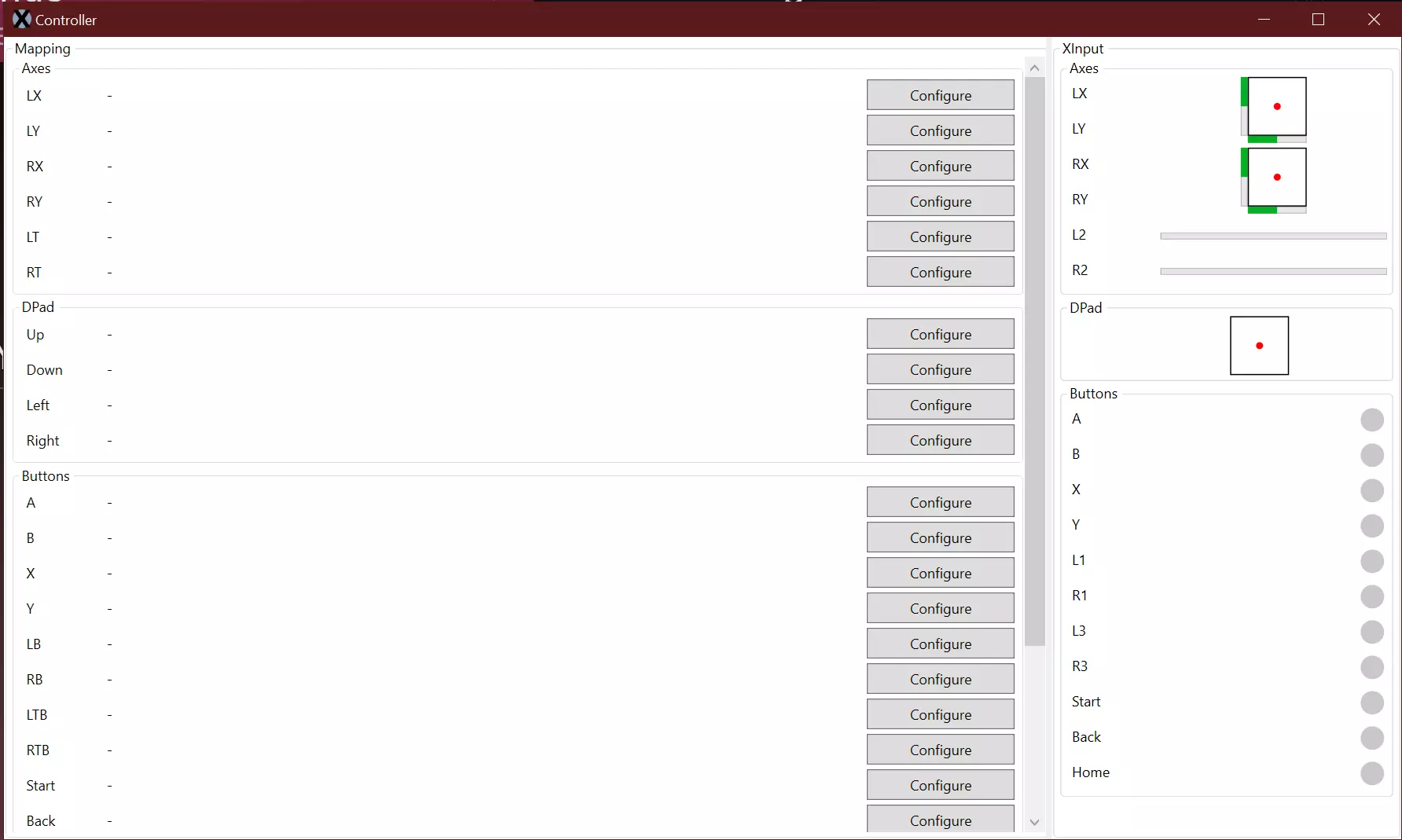
你需要查看【轴】部分。LX和LY分别对应(Xbox 360手柄上的)左摇杆的水平和垂直移动,RX和RY对应右摇杆,LT和RT则是手柄底部的扳机键。 LX轴用于控制飞船的偏航,你可能需要将其设置为摇杆的扭转功能。要进行此设置,请点击LX右侧的【配置】按钮。

左右转动摇杆,设置应如下【最小值和最大值为0和100,选定输入为z轴旋转】
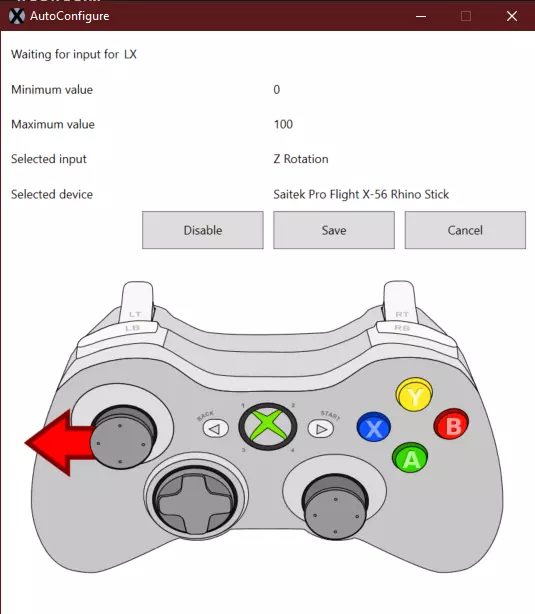
点击【保存】
它应该看起来像这样:
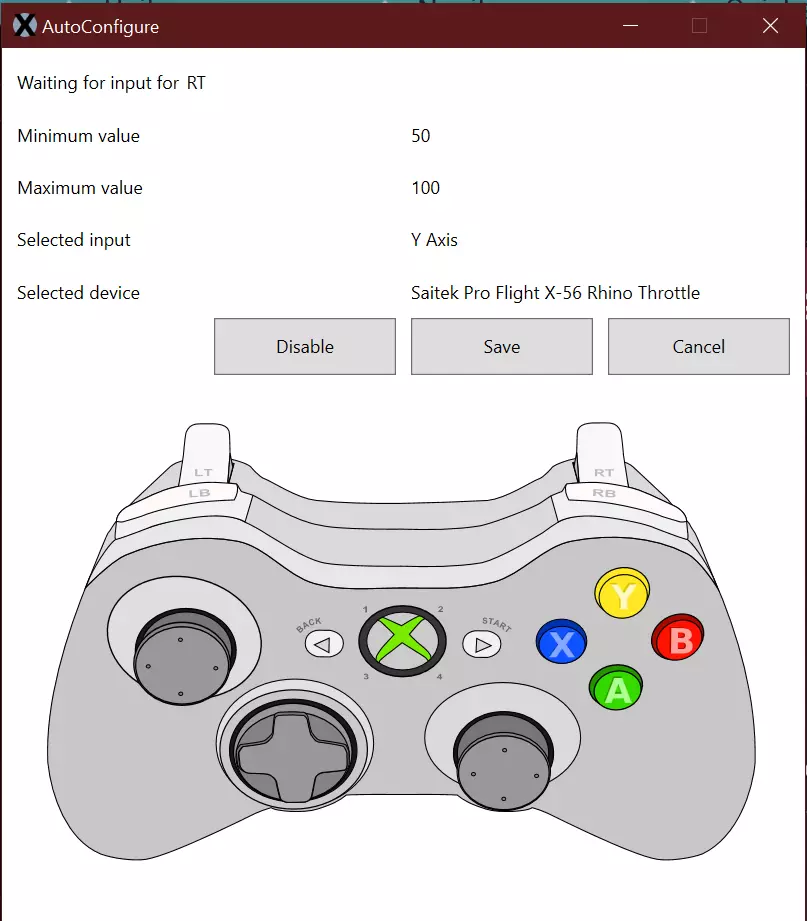
点击LY旁边的“配置”按钮(就在你刚才操作的下方),然后将操纵杆完全向前和向后移动,注意不要向左右移动。(Y轴的最小值应为0,最大值为100)。点击“保存”。现在你可以控制飞船俯仰和扭转偏航。俯仰目前可能是反转的,但你应该在最后测试后再进行调整。 你可以跳过下一段。 关于推进器,你需要决定如何设置。如果你希望油门控制推进,而另一个轴(如旋钮或操纵杆)用于其他功能(或者由于你可以拆分两个油门,你可以将一个设为刹车,另一个设为推进)。你也可以反转它们,这样你可以向前推一个来加速,向后拉另一个来刹车。这完全由你自己调整。),你将重复刚才执行的相同步骤。 我将按照VR中的虚拟油门方式来设置油门,即从50%的位置开始,向前移动是加速,向后移动是刹车。要执行此操作,请将油门设置在完全向前的位置,然后点击RT旁边的【配置】按钮。现在你将解耦两个推力杆,然后缓慢且小心地将其中一个油门向后移动到中点位置。(如果你希望有死区,你应该在到达正好50%之前停止移动油门,并且/或者你可以在X-56软件中为你正在使用的轴设置一个死区。有关详细信息,请参阅“X-56软件设置第三部分”章节。你需要点击底部S旁边的直线图表,在轴的中间设置一个死区。我无法让死区正常工作,实际上根本没起作用,它直接跳过了死区。也许你可以做到?如果你移动右侧油门,你会希望最小值恰好为50。点击“保存”。
从这里开始,将油门杆完全向后拉,然后对LT键重复此过程,将其向前推至中点位置,然后保存设置。

死区设置为10%

如果在设置过程中,最小值(或最大值)起始值为1或2而非0(或99或98而非100),一旦达到50%的位置(实际上你可以在任何时候这样做),你可以将油门杆完全回拉(或前推),系统就会更新该值。 为了让刹车在你将油门从50%回拉时正常工作,你可能需要反转LT键(如果你设置了右侧油门)。两个油门范围都应从50%(或你的死区范围)开始,并且右侧的L2和R2条不应同时显示绿色。

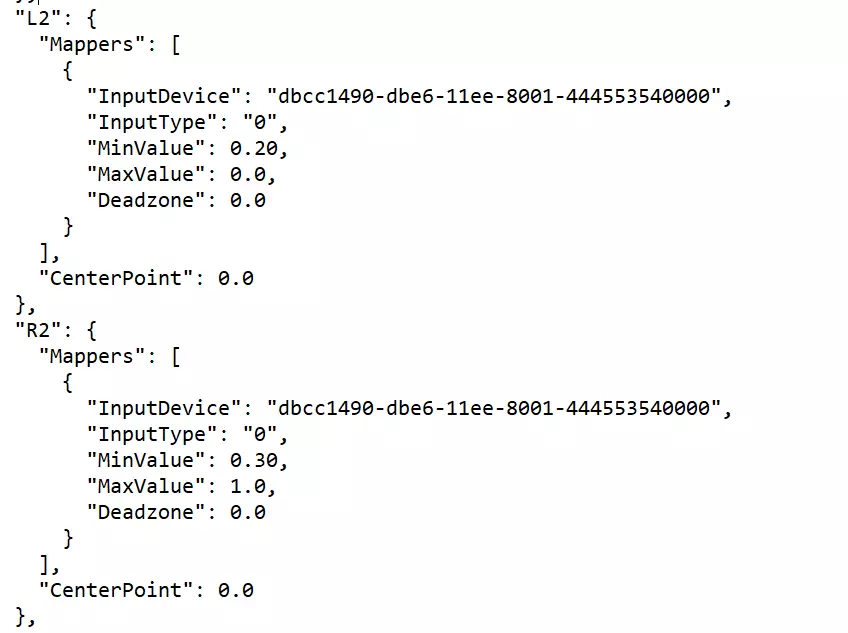
顺便说一下,我实际上将“中心”点设置在25%的位置,死区设置为从20%到0%为刹车,从30%到100%为推力。我最终不得不修改设置文件来实现这一点。该文件位于XOutput.exe所在的同一位置,由XOutput自动生成。如果显示文件扩展名,它名为“settings.jason”;如果不显示,则名为“settings”。关闭XOutput,更改L2和R2的“MinValue”值,保存文件,然后重新打开XOutput。
完成上述操作后,如果你没有需要为存在冲突按键绑定的按钮分配任何操作(如果有此需求,请参见第二部分),你应该可以关闭此窗口,它会自动保存设置,然后返回到XOutput的初始界面。点击底部的【保存配置】按钮。
然后你应该点击【开始】按钮。
“启动”控制器(从电脑角度而言)会开启一个Xbox 360控制器,其按钮和轴已映射到你的外部设备。 你无需阅读此部分。请记住,由于游戏默认不会对我们刚刚分配的任何轴做出响应,而是会对Xbox 360控制器的轴(实际上只是我们的轴被转换为Xbox 360控制器语言)做出响应,因此游戏只会识别虚拟Xbox 360控制器的输入。如果你之后进行任何可能存在按键绑定冲突的操作绑定,这一点将非常重要(参见第二部分)。 从现在起,你应该可以完全控制你的飞船了(如果你之前按照我列出的步骤操作了,请不要忘记重新连接你的节流阀)。你应该在【启动】控制器后【明确地】打开游戏并进行测试。你可以【停止】控制器,编辑相关设置,然后再次【启动】它,只要你在首次打开游戏时已启动控制器即可。如果有任何操作与预期相反,你可以在XOutput中找到对应的轴并点击【反转】按钮,这将解决该问题。 XOutput中的轴如下: LX:飞船偏航(机头左右转动) LY:飞船俯仰(机头上下转动) LT:飞船刹车 RT:飞船推进 俯仰和偏航默认有【很大的死区】,这将在【游戏设置】部分中修复。 不要忘记【保存配置】 XOutput设置(第二部分) 本部分适用于那些希望为按钮分配某些操作,但不想使用按键绑定方法的玩家。这可能是因为在你施加推力时按键绑定会出现抖动。我们的虚拟Xbox手柄有14个可用按钮,包括开始键和返回键,但不包括主页键,因为游戏无法对其进行特殊操作。 只有当你想使用两个H.O.T.A.S.(双手操控油门和摇杆)按钮来实现一个控制器按钮绑定时,才适用以下方法。你可以配置摇杆和油门上的按钮,并将它们绑定到游戏未使用的任何键盘按键(特别是在飞行期间,因为此时你正在使用H.O.T.A.S.),例如P键。然后你需要在Steam设置中更改控制器绑定。【设置游戏时此步骤同样必要】 在游戏内进行设置的方法:进入游戏选项,选择控制,再选择重新映射控制,然后点击底部的【通过Steam配置手柄】按钮。

要在游戏外的Steam中执行此操作,请进入你的库,右键点击《无人深空》,然后点击属性按钮。
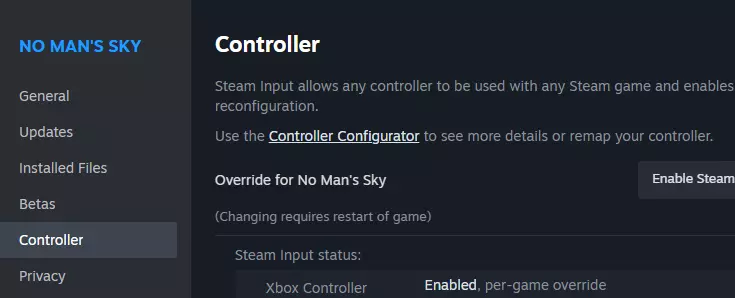
在此标签页中,找到控制器部分,然后在其中找到【控制器配置器】按钮。
这可能会随着Steam的更新而改变。无论如何,你应该会看到类似这样的界面。
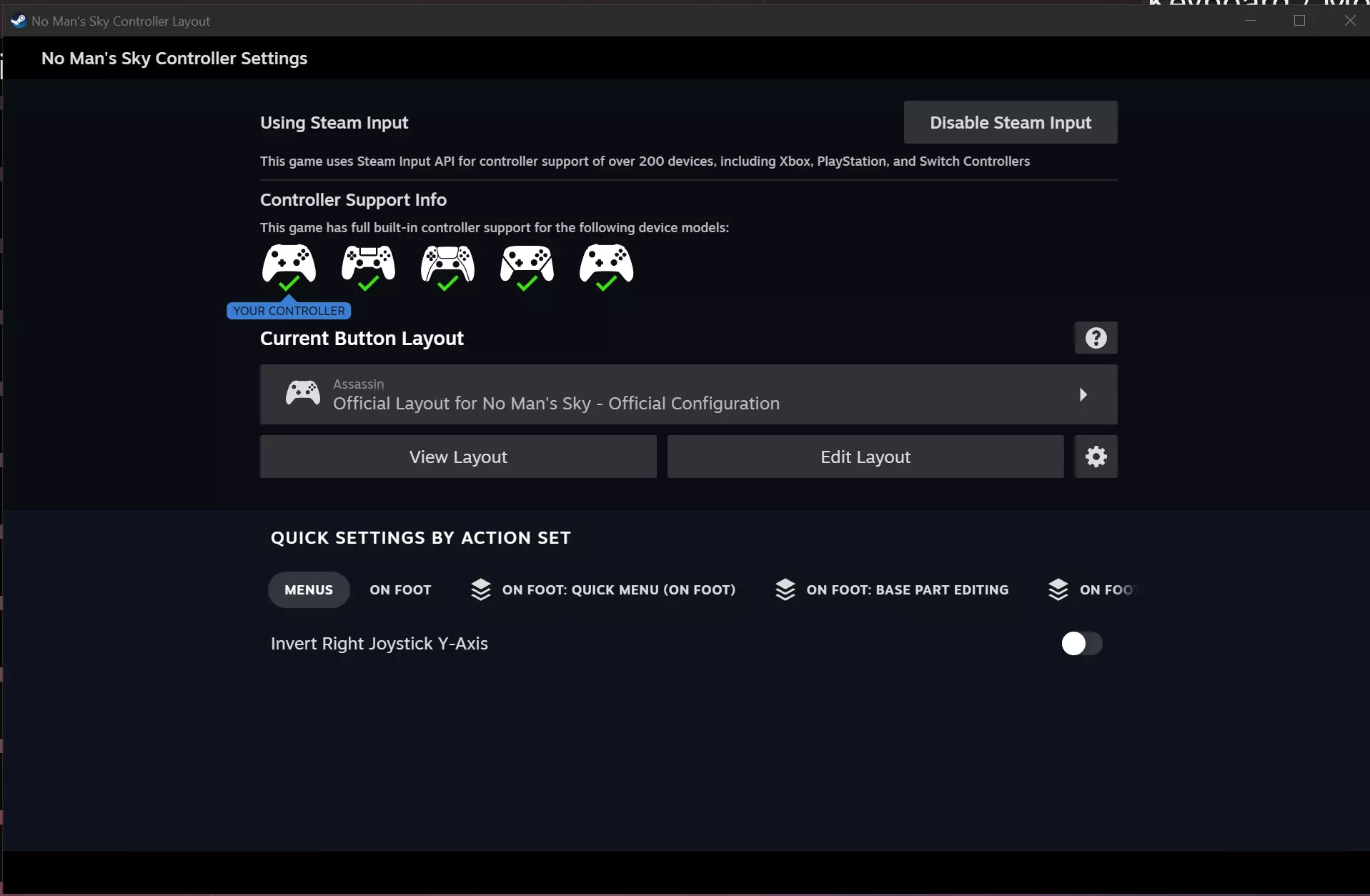
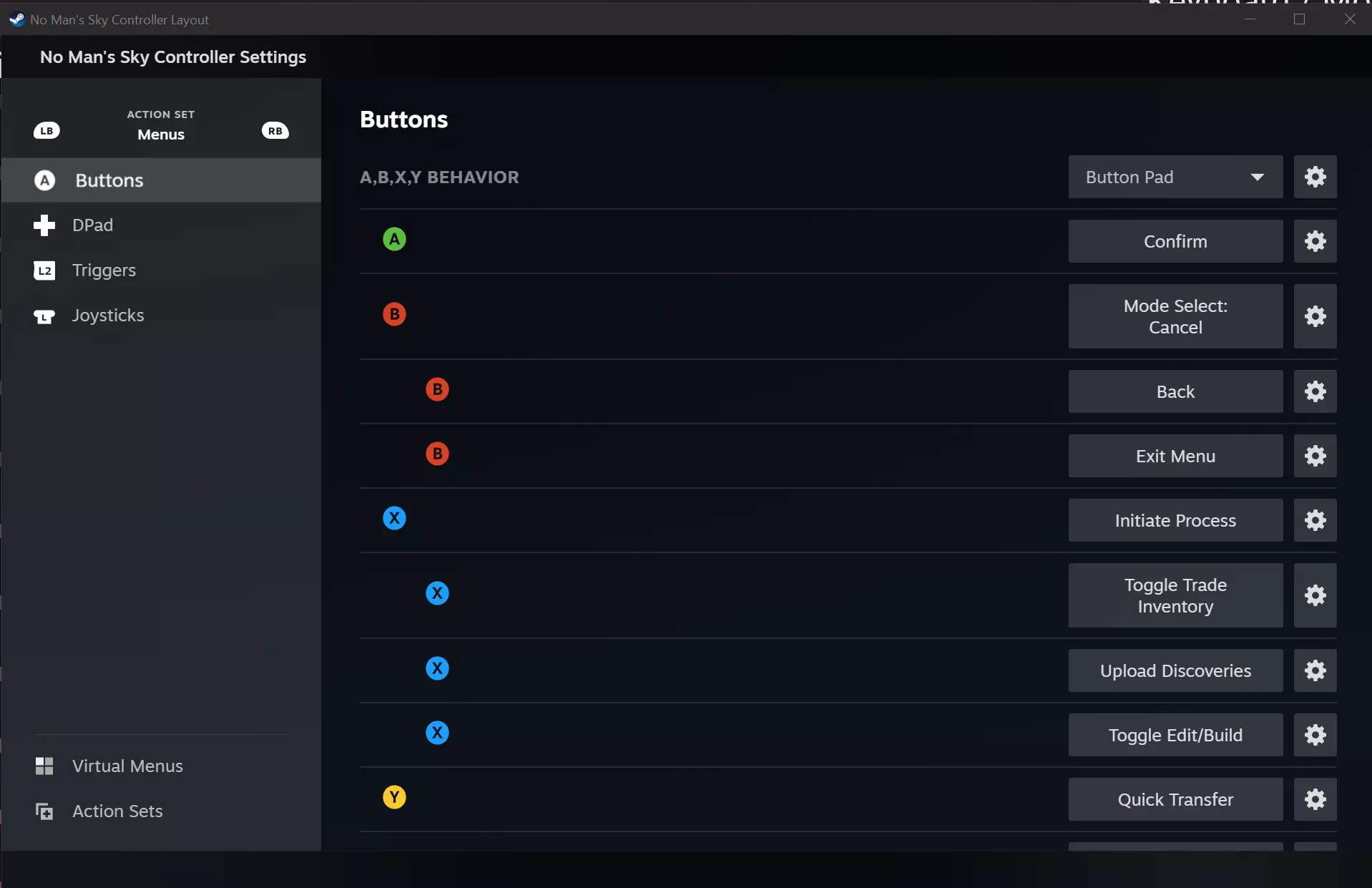
你需要点击“编辑布局”按钮(如果你连接了多个控制器,包括已“启动”的Xbox 360控制器,请确保你正在更改Xbox 360控制器的设置)(只有当Xbox 360控制器在XOutput中处于“启动”状态时,此按钮才会显示)。目前你应该避免调整触发器和操纵杆部分。不过你可以进入按钮或方向键部分。在按钮部分中,包含A、B、X、Y按钮、两个肩键以及“<”返回键和“>”开始键。
在右上角,你需要点击【RB】键来切换至【飞行控制】操作组。
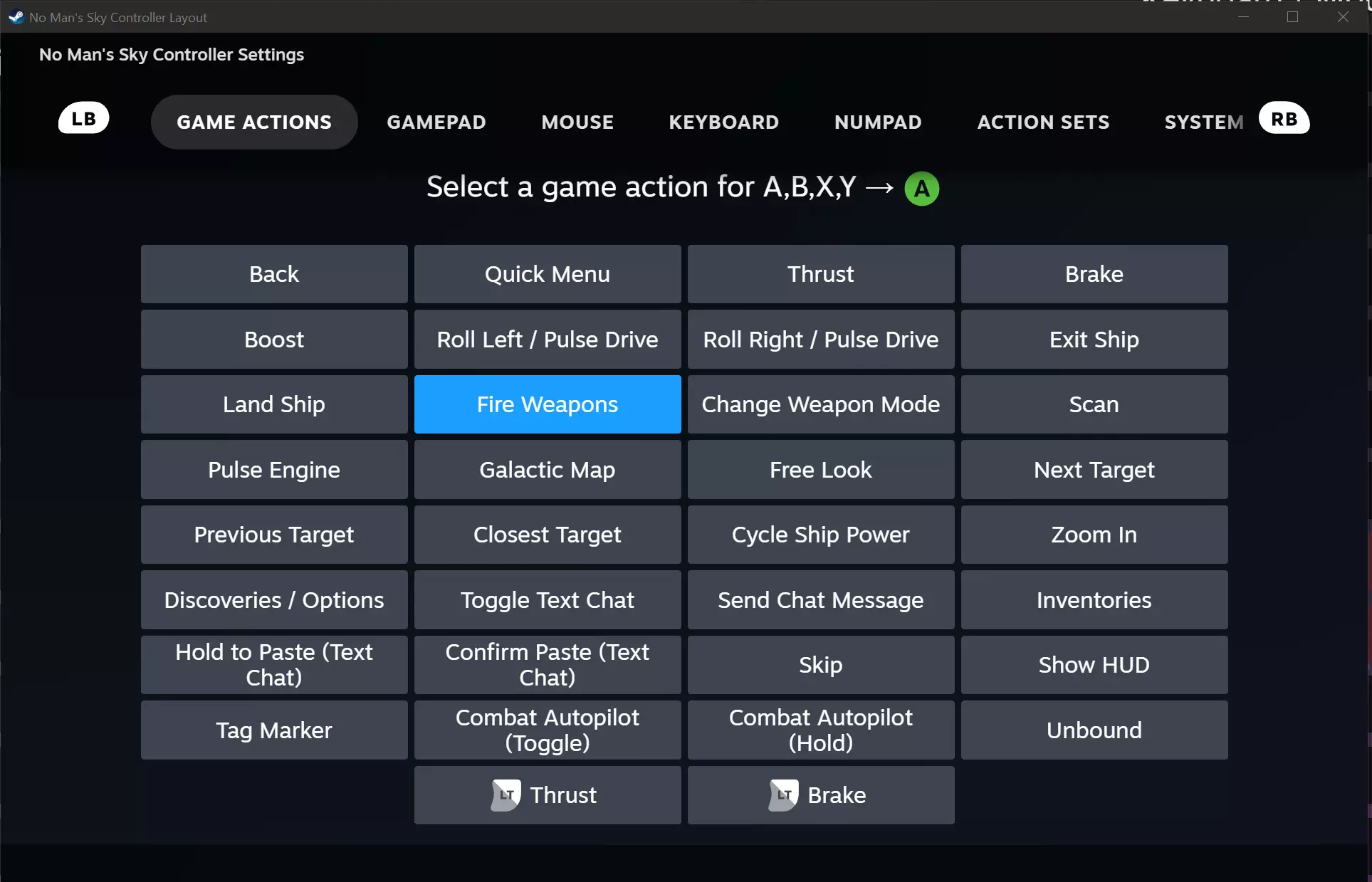
你可以点击任意灰色操作框,来更改虚拟按下该按钮时执行的操作。你可能需要从顶部的【游戏操作】菜单中选择功能。这里有34个选项可供选择,稍后我会解释如何同时执行多个操作。
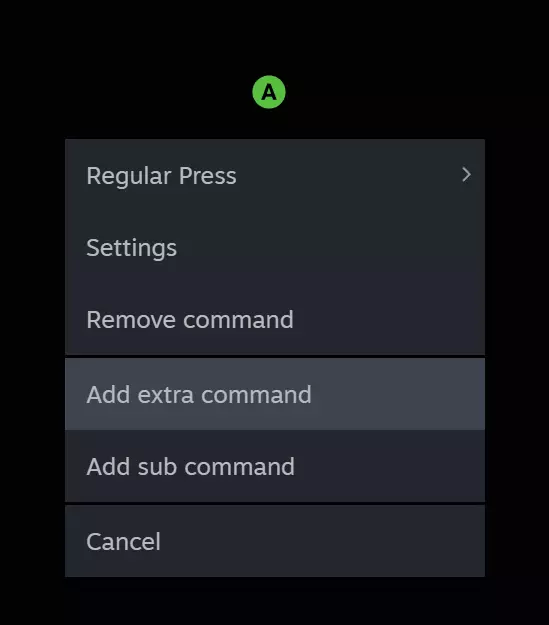
你可以将任意按钮设置为任意操作,在这里你可以选择一个按钮作为【登船】,另一个独立按钮作为【离船】。 如果你想让一个按钮执行多个操作,可以右键点击并选择【添加额外命令】,使该按钮同时执行两个操作;或者选择【添加子命令】,以便在主命令无法执行时执行另一个操作。
在右键菜单中,你可以更改该按键的激活方式,例如双击激活。你可以对此进行调整。
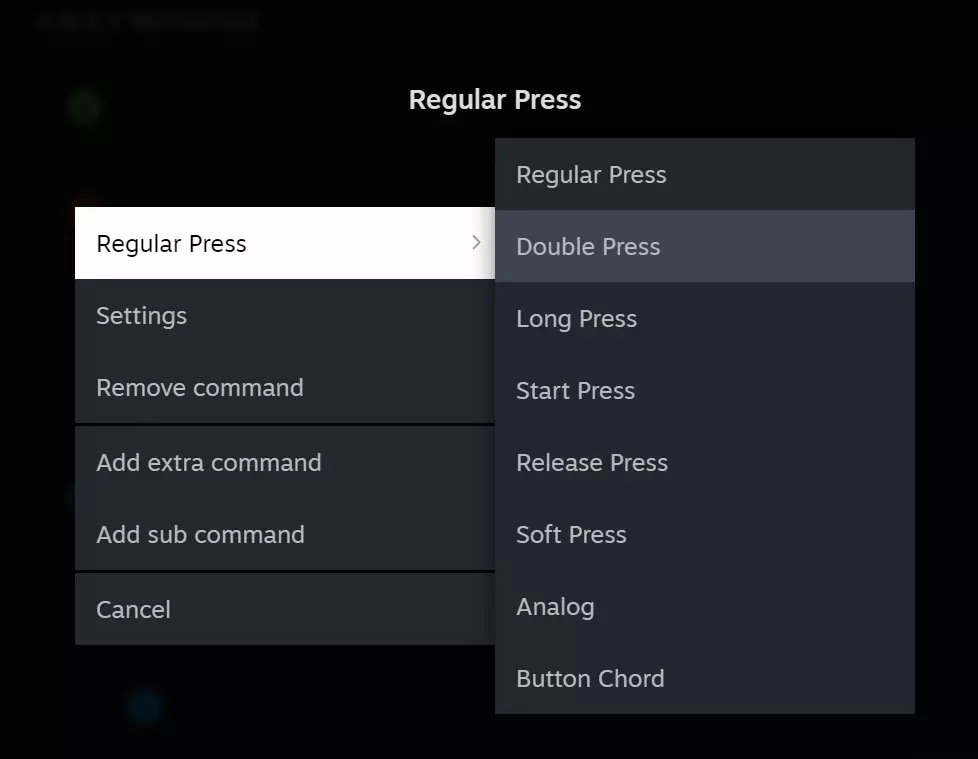
你也可以点击“设置”按钮来访问“按压类型”的高级设置。这里我就不详细说明了,因为内容太多,而且可能也用不上。 将所有按钮设置为你想要的所有操作。 本指南的这部分内容允许你将多个按钮分配给一个控制器按键。如果你只想将H.O.T.A.S上的一个按钮映射到一个控制器按钮,那么你不需要在X-56软件中绑定键盘按键。相反,当Xoutput中提示将某个按键绑定到控制器时,你只需按下H.O.T.A.S上你想要的那个按钮即可。 举例来说,左保险杠可以设置为“着陆飞船”,右保险杠可以设置为“离开飞船”。你应当将希望用于执行飞船着陆(或你选择的其他任何操作或操作组)的摇杆(或油门)按钮绑定到一个未使用按键的按键按下操作。这里以P键为例。 为此,你需要关闭Steam控制器菜单。在XOutput中“停止”你的控制器,然后点击其“编辑”选项。在你设置用于执行所需操作的按钮下,将其设置为响应你绑定到该操作按钮的按键按下。 详细说明一下,我的例子是将P键绑定到两个我想要用于着陆飞船的按钮,并且我将“飞船着陆”功能绑定到了左 bumper(LB)。我会点击LB字母旁边的“配置”按钮,然后在键盘上按下P键,之后点击“保存”,完成后应该会显示为这样:

然后我将键盘上的O键绑定到了两个我想用来离开飞船的按钮上。因为“离开飞船”功能已绑定到右肩键(RB),所以我会点击RB旁边的“配置”按钮,然后重复之前的步骤,按下O键并保存设置。

对控制器上每个你分配了自定义操作的按钮重复此过程。 重要的是,你使用的键盘按键不应是游戏中用于飞行的按键,因为游戏仍会同时识别这些键盘按键和控制器按钮的按下操作。 编辑任何内容后,务必“保存配置”并再次“启动”控制器。 XOutput 设置第三部分 这部分仅涉及 XOutput 本身的一些选项。 每次关闭游戏后,若想再次游玩,你需要打开 XOutput,但你可以将该应用设置为随 Windows 启动。 你无需阅读此内容。这可能对你有帮助,也可能在其他游戏中给你带来麻烦。如果将其设置为随Windows启动,这意味着每当你按下绑定到控制器按钮的键盘按键时,该控制器按钮**每次**按下该按键都会被激活。例如,如果你切换到键盘进行移动,然后按下P键(以上述示例为例),它将激活左 bumper(LB)键,该按键默认用于切换副武器。在运行此程序的情况下,打开任何其他游戏时也会出现相同效果。 要将应用程序设置为随Windows启动,请点击应用程序顶部的【工具】按钮,然后点击【设置】。
现在你可以勾选“Windows 启动时运行”框。
游戏设置 需要注意的是,每次关闭并重新启动电脑后,你都需要打开X-56软件,并将刚刚创建的配置文件应用到你的飞行摇杆(H.O.T.A.S.)上。或者,你也可以调整默认配置文件,它应该会自动加载(理论上如此,不过我尚未测试,可能无法自动加载)。 要加载配置文件,在“编程”部分下,点击摇杆或油门,然后点击那个悬停时显示“加载”的马尼拉文件夹图标。
双击你的已保存配置文件,即与你命名的配置文件同名的那个。然后你应该点击【配置文件】按钮。
点击按钮应用此配置文件。 有关如何进入Steam中Xbox 360控制器布局编辑界面的详细步骤,请参见【设置XOutput,第二部分】。你需要先进入该界面。
或在游戏内选项 > 控制 > 重新映射控制 >
这应该会让你进入此界面:
从这里导航至【飞行控制】操作集
并进入【摇杆】部分
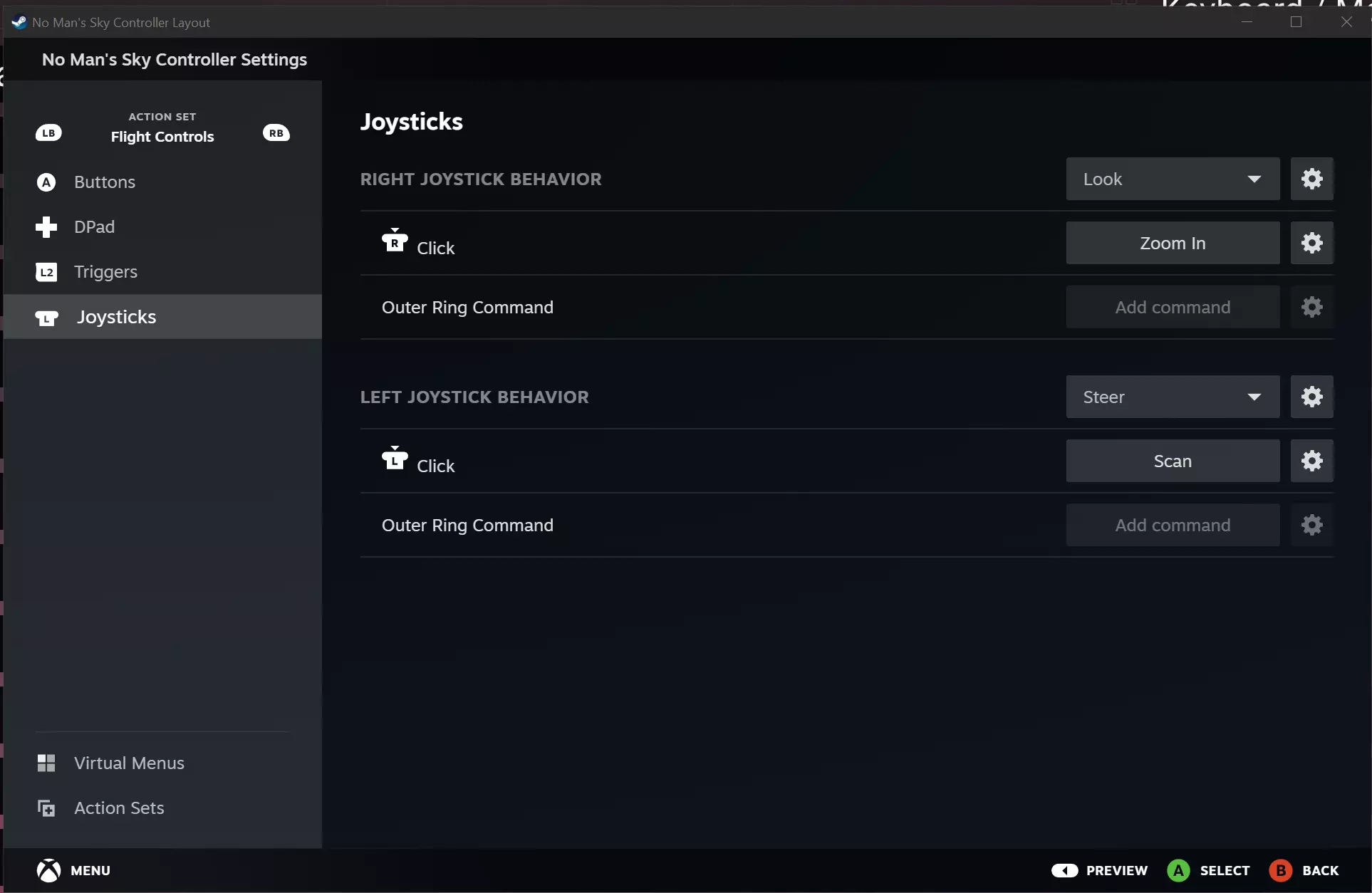
你需要点击左摇杆行为旁边的齿轮图标。

从该菜单向下滚动,直至找到【死区】部分。其显示应如下所示:

点击【默认】,然后点击【自定义】选项。
根据个人喜好调整死区,我会将我的设置为2和100,因为我的X-56软件中的死区已经很有效了。
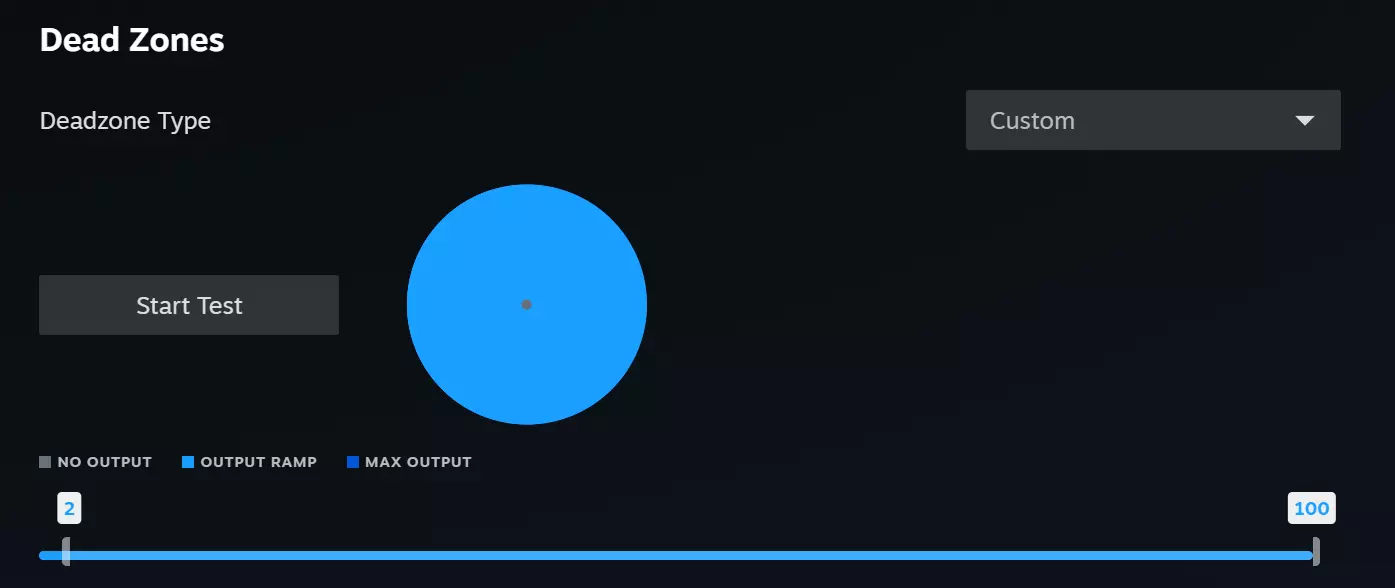
这里有更多你可以调整的设置,但你可能并不需要。调整时请务必谨慎,因为你可能会把事情弄得比预期的更糟。 至于游戏内设置(假设你目前没有使用手柄,也没有手柄。如果你有手柄,只需用手柄更改设置,而不是键盘/鼠标),你需要使用油门或操纵杆来模拟Xbox 360手柄的输入,例如油门或用操纵杆控制俯仰。进入选项>控制后,进行上述操作,你会注意到选项会从键盘选项切换到控制器选项。你必须使用控制器输入来调整这些选项,但可以用鼠标移动光标。要做到这一点,你需要绑定一个飞行摇杆。在XOutput中,将该按钮暂时映射到手柄的A键。 你需要用这个来调整【飞行灵敏度(手柄)】,灵敏度越高,飞船移动速度越快,但精准控制会变难。 设置方面大概就是这些了。你一定要先在太空中和地面附近飞行一段时间,确保对所有设置都满意。 收益 你需要多琢磨调整,让一切符合自己的需求。记得在每一步都保存所有设置,并应用/启动相关功能。祝你玩得开心!(或者不开心,我又不是你妈)