换一换
换一换 





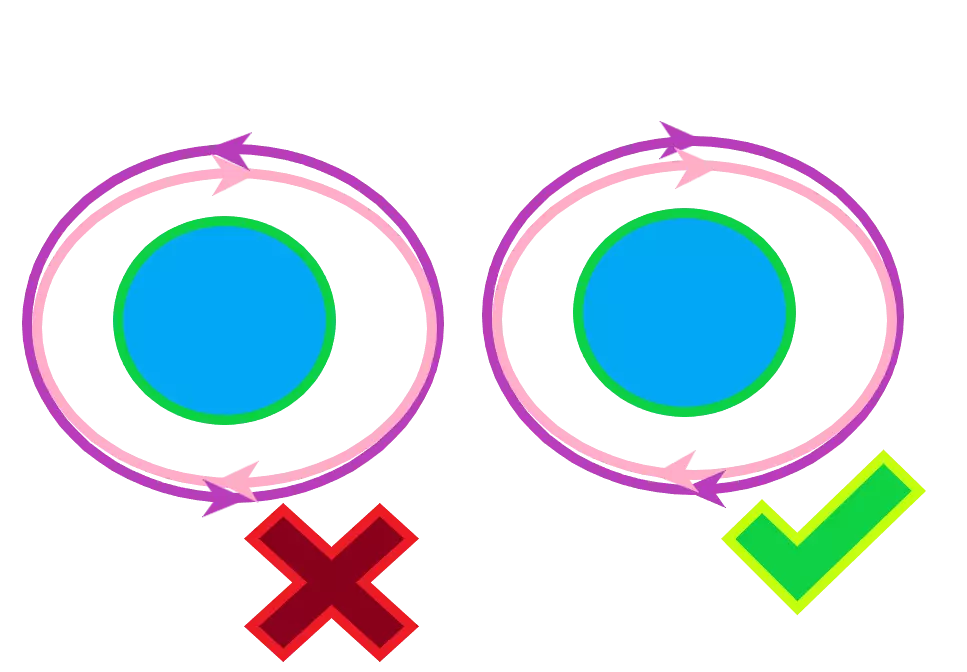
本指南涵盖了《坎巴拉太空计划》中着陆器设计的基础知识。这里有一些可以直接使用的设计,这些部分标有“RTU”,但本指南并非旨在为每种情况提供现成可用的航天器,而是让你了解设计自己的航天器时需要注意的事项,展示各种设计方法,以及在相同的基本设计中使用高级模块如何带来益处。 为什么我可以直接让整个火箭着陆,却还要建造着陆器呢? 有两个简单的原因让你想要建造着陆器。 其一,你带到行星或卫星上的所有东西都需要再次带回来。如果你把返回级一起带下去,会有很多额外的重量。你的着陆器需要更多燃料才能起飞,尤其是执行星际任务时,你需要在较低级段储备额外燃料,以便首先将着陆器所需的额外燃料一同携带。 此外,着陆器遵循不同的稳定性规则。对于火箭而言,将质心置于中部甚至上三分之一处通常是有利的,但着陆器则需要尽可能做到底部沉重。原因在于,如果着陆器头重脚轻且细长(就像整个火箭着陆时那样),它很容易倾倒。而如果将其建造得底部沉重、宽度大于高度,那么在着陆时就会非常稳定。 哦,还有第三个原因。你的任务将类似于阿波罗登月,因此至少会精彩两倍。 稳定性到底是如何运作的呢? 你有没有想过为什么那么多人坐在酒吧高脚凳上时会摔倒?可能还有其他因素,但其中一个原因是酒吧高脚凳的凳腿靠得很近,而且凳子本身很高。对比一下草坪椅:
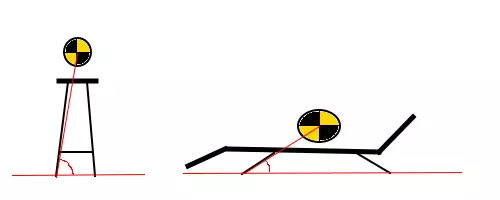
观察从腿部接触地面的位置延伸至质心(即坐在凳子或椅子上的人)的红线,以及我们所得到的角度。 吧台凳示例中的角度接近90度,这意味着如果我们将其向侧面稍微倾斜一点,重力就会将质心向下拉。 草坪椅示例中的角度小于45度,这意味着我们实际上需要将其一侧抬起相当大的幅度,直到达到某个角度,此时重力才会使物体翻倒,而不是将其拉回原始位置。 这对我们的着陆器意味着什么呢? 当我们尝试在行星或卫星上着陆时,我们的航天器在触地时可能并非完全直立,地形可能存在倾斜角度,或者两者皆有。如果着陆器造得像个酒吧凳,我们的容错率就会非常低,而且在较陡的斜坡上根本无法着陆;而如果着陆器造得像个草坪椅,我们就不会有这个问题。

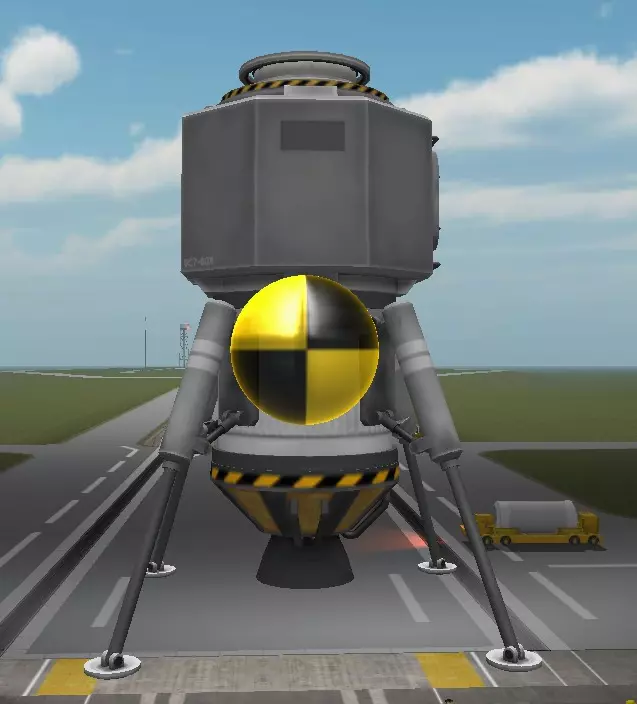
This is a lawn chair lander on Minmus, the slope here is more than 30°, but as you can see, with landing legs setup like this, we can still land there. This also means we can possibly save on fuel, since a little slope will not mean we have to maneuver to try and get over a better landing site. In case you are wondering, the lander can in this picture is from the mod ASET ALCOR, a very good 3-man lander can that has a great RasterPropMonitor IVA you can use to do the whole landing from inside the craft. Highly recommended if you are into mods. What about mods, do I need mods for this? No, you will not need mods, everything in here works with just stock content. However, there is one mod that you likely will want to install anyway: Kerbel Engineer Redux will allow you to see vital stats of your craft such as exact weight and TWR per stage while you are building it. This is not just useful for building landers, but for building rockets too, and even planes. If you don't already have another mod that does the same thing, then get this one right away. Ship Manifest is another mod you'll love with missions that involve docking a lander to your ship. While Kerbals can crawl through docking ports, and even transfer resources, they haven't figured out how to pass a notepad through there, or a bag of rocks for that matter, and insist on doing that by EVA instead. This mod fixes that issue, it will even allow you to download data from external devices like thermometers directly into your lander craft or main ship, without having to EVA and read the display yourself. Given that you can radio-transfer the data directly to Kerbin, you'd probably assume you can radio it to your capsule too, but you can't. What about tech, I'm in early career and that science isn't free you know? Don't worry, to apply the principles shown in this guide, you will only need a couple of tech nodes unlocked. The designs shown here will use modules that take quite a bit of science to unlock though and may not be immediately available to you. I am going this route to show you the practical use of modules like the toroidal fuel tank while covering the basics, and give you a good reason to unlock those tiny engines that might seem so utterly useless at first glance. You might even reconsider what route you want to take while unlocking the tech tree, given that being able to recover surface samples and experiments efficiently is the fastest way to those top tier nodes. Does it make a difference where I want to land? Yea, it does make a huge difference! Basically, we have two different types of landings: atmospheric landing For atmospheric landings, we will need the bulk of our fuel supply for the ascend phase, that is after we already have landed and want to get back up again. This is because celestial bodies with an atmosphere typically have more gravity, and the atmosphere will work against the thrust of our engines. Our TWR (thrust to weight ratio) will need to be bigger here, and we typically will need a lot more fuel compared to landing on a moon without an atmosphere. Depending on the thickness of the atmosphere, we might even need a heatshield so we do not burn up. The good news is that we will use little to no fuel while in the descend phase, as we can use the atmosphere to reduce our initial speed (aerobraking), and slow our final approach by using parachutes. non-atmospheric landing For non-atmospheric landings, the only thing we have to worry about is the gravity of the celestial body we want to land on. Because there is no atmosphere for aerobraking that could slow us down, we will use a considerable amount of our fuel supply for the descend phase, especially if we want to play it safe and gradually slow our descend instead of doing a well-timed burn right before impact (often called a 'suicide-burn'). The fact that we use up a lot of fuel in the descend phase also means we have to decide if we want to keep our lander design simple (single-stage lander), or if we want to optimize our fuel usage by leaving the descend stage with the landing legs and all those empty fuel tanks behind (multi-stage lander). TWR what? Explain that for people who hate math... You probably already heard about deltaV, the total amount of velocity change your craft is capable of with its fuel supply. In a nutshell, TWR dictates how fast you can use your deltaV. The higher your TWR, the more of your deltaV you can put out of your thrusters per second. Obviously important if you want to get into space, since you have to overcome gravity, but the rule of thumb "greater than 1.6 for first stage" did probably work for you so far, that is if you just didn't build your rocket by trial and error. For landing a craft, this is also interesting, since it also helps us save fuel. A simplified example: Suppose you are moving at 100ms towards the surface of a moon, and you decide you want to slow down to 10ms. The gravity of the moon accelerates you more, by 1ms per second. With a lander that can put out 2ms of its deltaV per second, half of that is used fighting gravity, and you slow down by 1ms per second. This means you take 90 seconds to reach your target velocity, and you will have used 180ms of your deltaV supply. With a lander that can put out 6ms of its deltaV per second, you still only use 1ms per second fighting gravity, and slow down by 5ms per second. This means you take 18 seconds to reach your target velocity, and you will have used 108ms of your deltaV supply. As you can see, a higher TWR means you save on fuel, but it also makes landing a lot safer. This is getting boring, let's build something already! Alright, let us build a basic lander we can use for the Mun or Minmus. We start with a lander can, and attach some landing legs:

注意我是如何尝试直接将着陆腿连接到登陆舱上的。这样做的目的是让着陆器尽可能扁平,同时降低重心,使其不易翻倒。 不过,我们还需要燃料和发动机,所以让我们安装一个FLT-200燃料箱和一个LV-909发动机。这样一来,总质量约为2.5吨,Δv( deltaV)接近1700米/秒,推重比(TWR)为2.41,总体而言,这足以在 Mun 或 Minmus 着陆,更重要的是能返回主飞船。再加上一个对接端口,就成了现在这个样子。

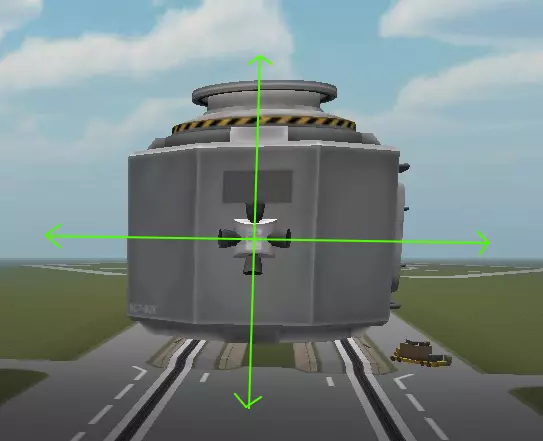
我们不得不将着陆器的着陆腿下移到燃料箱位置,因为之前的离地间隙不足以容纳燃料箱和发动机。 现在,我们基本上可以把这个部件安装到火箭上,然后前往 Mun。不过,至少要先在上面安装一个温度计,如果已经研究并获得了太阳能电池板,最好也装上一个,或许还可以安装一个天线,以便立即传输船员报告。 但让我们先来看一下我们本应注意的质心:
好吧,不幸的是我们不得不把着陆腿往下移了一些,所以我们的着陆器变得稍微高了一点。这虽然不是完全无法接受,但肯定不太理想。注意到我为引擎留出了刚好足够的离地间隙,尽量保持它平稳。 我们总是希望将重心尽可能靠近地面,同时让着陆腿之间的距离尽可能远。不幸的是,将着陆腿移到燃料箱上后,它们之间的距离也稍微近了一些。 另一种方法: 那么,我之前提到的这些闪亮的模块……让我们看看如何改进我们的基础着陆器。我们将燃料箱更换为环形燃料箱,着陆腿更换为牙签式着陆腿,并选用“火花”发动机,同时在侧面额外安装两台“抽搐”发动机以产生额外推力。

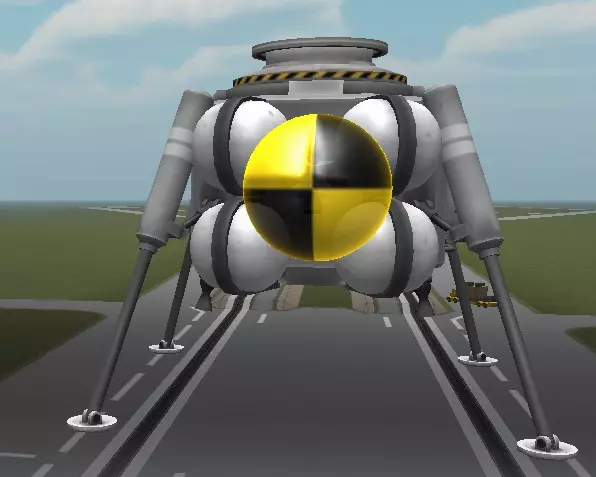
有了环形燃料箱和更小的发动机,我们所需的离地间隙大幅减少,因此可以将着陆腿移回舱体侧面,甚至现在可以使用更小的着陆腿了。我们的着陆器现在质量仅约2吨, deltaV略降至1650米/秒,推重比为2.47,总体数据更具吸引力。尤其是它没有那么高,而且重心位置也很合适。

如果我们着陆失败,将更难把它翻倒。而且由于我们节省了约20%的总质量,将需要更少的燃料就能把它送到目的地。 此外,现在质心位于着陆舱内部,我们可以更轻松地添加RCS推进器,而不会使事情变得过于复杂。 我们也可以使用第一种设计中使用的普通着陆腿,用另一个环形燃料箱来补偿额外的重量(以及deltaV的损失),这样能让着陆器更加稳定(因为LT-1着陆腿更宽一些),不过这会增加约半吨的额外质量,但同时也能获得一点deltaV。虽然简单的着陆器不需要RCS,因为我们完全可以让主飞船与着陆器对接,但对于更先进的设计,我们肯定希望配备RCS。毕竟驾驶较轻的航天器进行对接操作总是更容易,而且在着陆器还有剩余燃料的情况下,没有理由浪费返回级的燃料。 更容易对接听起来不错,我想在我的着陆器上安装RCS! 好的,那我们就在着陆器上添加一些RCS推进器。首先,我们先单独看一下着陆舱,检查一下质心:

看起来质心正好在着陆舱的中央。很方便,我们只需要安装四组RCS推进器,这样就万事大吉了,对吧?

不过,显然我们把气闸门给堵上了。如果我们的坎巴拉小人无法离开着陆器,那着陆器对我们来说就没什么用了,而且如果你和我一样,可能也不喜欢挡风玻璃上装着推进器吧。 但幸运的是,我们其实不需要四个RCS推进器,两个就够了。让我们把两个推进器放在彼此相对的两侧,看看这样能开启哪些平移轴。
如果我们将对接端口定义为飞船的前方,气闸舱门定义为顶部,那么使用RCS推进器可实现以下平移运动:向前、向后、向上、向下。旋转对我们来说不是问题,因为我们可以通过内置的反作用轮随意旋转飞船。由于我们可以旋转飞船,这也意味着我们可以实现向左和向右的平移。只需将飞船向右翻滚90°,向上平移就会变成向右平移,向下平移就会变成向左平移。看来我们只需要两个推进器就足够了。注意:如果你正在使用模组,建议检查一下是否有模组提供带有五个喷嘴的RCS推进器。这些将为我们提供完整的翻译能力,无需进行工艺滚动,即使我们只放置其中两个。让我们再看一下我们的基本着陆器设计,或者更确切地说,是它的质心。这次,我们将从油箱中移除燃料,只在油箱中留下大约10%的燃料。考虑到我们在着陆并再次起飞进入太空后需要对接,合理的假设是我们将使用大部分燃料供应。

嗯,质心实际上在着陆舱外部。这意味着我们终究还是可以安装四组推进器……别担心,我保证让你读了这么多内容不是白费功夫。

推进器已安装完毕,现在我们只需要一些RCS燃料,因为自带的15单位燃料很可能不够用。所以我们在飞船上加装了两个圆形RCS燃料罐,然后检查质心是否仍然正常。

看起来还行,看来你研究双RCS推进器的那些东西都白费了? 也不全是,我们快速检查一下飞行器数据……糟糕,我们的ΔV(DeltaV)和推重比(TWR)都变得一团糟,而且飞船还变得像个“鲸鱼”一样笨重。毕竟我们确实增加了一些额外重量。 这显然很糟糕,那么我们现在能做什么呢?我们可以添加一个燃料箱来获取额外的ΔV,同时增加一些额外的引擎来恢复推重比,或者我们可以从RCS燃料箱中移除一部分单组元推进剂,只携带我们认为需要的量。 第一种选择意味着我们会增加更多重量,加剧燃料消耗过程中质心到处移动的问题,甚至可能让飞船变得更高。第二个方案也不怎么样,我们仍然会损失相当多的【Δv】,与没有推进器的版本相比质量也更大,而且最终很可能还是会缺少1-2单位的【RCS燃料】。不过,还有另一种解决方案。那好,那就告诉我那个更好的方案。遗憾的是,它并非在所有方面都是更好的解决方案。先来说坏消息: 相比没有RCS的原始飞船,我们会增加一些质量 相比没有RCS的原始飞船,我们会损失一些推重比 我们只有双RCS推进器,因此需要旋转才能实现全方位平移能力 但也有好消息: 相比原始飞船和启用RCS的飞船,我们会获得更高的稳定性 我们只使用一种燃料源,因此无需担心燃料用量 我们不必担心燃料燃烧时质心的变化 在飞行的所有阶段,我们都将拥有完美的RCS精度 那么我们要怎么做呢?答案就是“噗噗”单组元推进器,这是另一种非常实用的小型发动机。顾名思义,它不使用液体燃料和氧化剂,而是像我们的RCS推进器一样依靠单组元推进剂运行。所以我们要添加一堆单组元推进剂储罐,然后放置四个这种小东西。

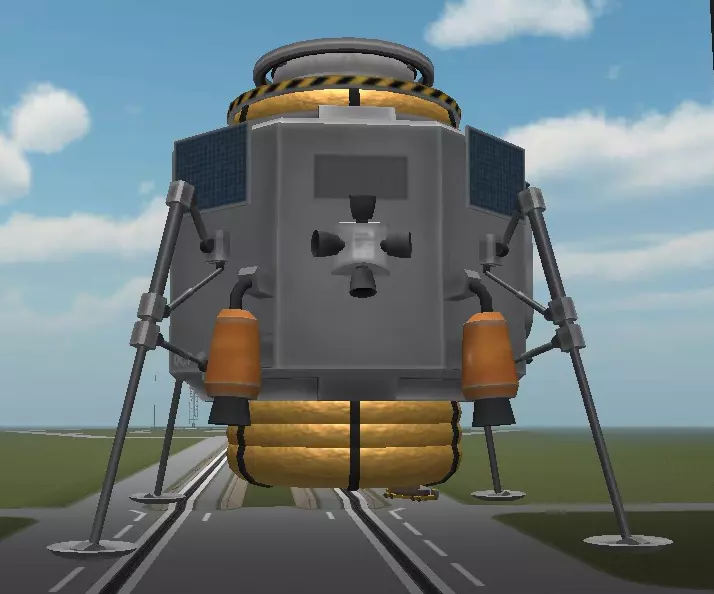
太好了,有了这个配置,我们甚至可以把着陆器的腿移回到燃料罐的侧面,这样又能增加稳定性了。让我们快速检查一下质心位置:
看起来它正好安放在我们的着陆舱中间,这样即使我们搞砸了着陆,这艘飞船也不会轻易翻倒。 让我们快速看一下数据。ΔV(德尔塔V)回到了原来的1700米/秒左右,推重比(TWR)保持在2.06,仍然可以接受。遗憾的是,由于单组元推进剂发动机不如液体燃料发动机省油,我们增加了1.5吨的质量。 这是个艰难的决定,所以让我们再考虑一个因素。看看几乎耗尽所有燃料后的质心位置。 现在使用单组元推进剂储罐,与液体燃料储罐相比有一个不同之处。即使没有燃料管线,它们在每个阶段都会以相同的速率均匀排空。这意味着我们将所有RCS储罐排空至10%,然后检查质心位置。 结果呢,你猜怎么着,质心纹丝不动。使用我们的RCS推进器设置,显然可以不用考虑质心移动的问题,无论消耗了多少燃料,都能完美放置推进器。 综合考虑,如果我们终究要在简易着陆器上安装RCS推进器,这似乎确实是更好的解决方案。 但为了这些额外的质量,我们得到的回报却如此之少? 不过,如果我们愿意将设计稍微复杂化一些,就能节省一点质量,同时提升我们的ΔV( deltaV )和推重比( TWR )。 让我们暂时回到理论层面,我们假设执行的是无大气层着陆,任务要求在与主飞船分离后,完成脱轨、在天体着陆、返回太空并抵达主飞船可对接范围,总共需要1700米/秒的ΔV( deltaV )。我们之前也提到过,下降阶段需要更多的ΔV(德尔塔V),而上升阶段则需要少一些。 假设下降阶段需要1000米/秒的ΔV,上升阶段需要700米/秒的ΔV,这样就有了具体的数值。 现在我们将分别为这两个阶段建造着陆器,先从上升阶段开始。安装两个单组元推进剂罐、两个单组元推进剂发动机以及RCS(反应控制系统),目前的结构如下:

重量略超1.8吨,863米/秒的ΔV已经超过了计划所需,这让我们有足够的单组元推进剂用于对接序列,2.24的推重比对于任务来说也相当可靠。 目前一切顺利,现在我们添加一个分离器,将其打造成多级着陆器。这样一来,我们就能确保上升级可以安全地不受下方任何操作的影响,保持当前的稳固状态。 我们之前讨论过液体燃料发动机比单组元推进剂发动机的燃料效率要高一些,所以让我们用液体燃料来建造下降级。在分离器上安装四个环形燃料箱,现在我们看到的就是这样的结构。

这增加了1.4吨质量,使得着陆器的总质量达到3.2吨。上升级的参数完全没有变化,因为在启动上升级之前,我们会将下降级留在原地。 但有一个小问题:环形燃料箱只能连接单个引擎。考虑到【Spark】引擎,如果需要快速减速,它的推力是不够的。 解决方案是使用【八角形桁架构件】,其质量对我们来说可以忽略不计。因此,我们在燃料箱下方添加了两个这种构件,并连接了【Spark】引擎以及四个【Twitch】引擎。现在着陆器的结构如下:

它的重量约为3.7吨,因此我们节省了0.3吨的质量,它的德尔塔V(deltaV)有了相当大的提升,总计接近2000米/秒,并且仍然具备良好的RCS功能。 由于我们有望在着陆前不会将下降级完全耗尽燃料,我们甚至可以将下降级剩余的燃料用于上升级的初始阶段,因此与上一个设计相比,所有的变化就是我们减轻了一些重量,并且显著提高了德尔塔V的安全余量。 关于质心以及在两个阶段燃烧燃料时质心的变化情况,我将留给你自行探索。 可以说,与上一个设计相比,这个设计的缺点是在飞行的所有阶段,RCS的对准不如之前那么完美。注:正如一位困惑的玩家所指出的,我们也可以使用Oscar-B燃料箱代替八角形支架来安装发动机。这会使我们损失一些离地间隙并增加质量,但也能获得一些ΔV(DeltaV)。或者,我们可以用Oscar-B替换一个环形燃料箱,并将其用于安装发动机,这样可以恢复离地间隙,但会损失一部分ΔV。 看起来RCS(反应控制系统)带来的麻烦比它的价值还大? 目前看来确实如此。但我们或许应该更深入地研究这个问题。 我们之前假设登月舱配备的15单位RCS燃料不够用。但事实真的如此吗? 让我们来计算一下,使用RCS推进器时,这些燃料能提供多少实际的燃烧时间。我们本可以直接计算,但不如直接把推进器装在着陆舱上,在发射台上进行测试。RCS推进器的说明显示,其最大每秒消耗0.25单位左右的燃料。现在我们有两个推进器,它们总是同时点火,在发射台上的测试也证实了我们的预期——两个推进器每秒共消耗0.5单位的单组元推进剂。这样算下来,15单位燃料的燃烧时间为30秒。对于初期阶段来说,这听起来还不算太糟,但可能还是不够用。不过等等,我们是在发射台上测试的。这些推进器在真空中不是效果最好吗?确实如此,我们又进行了一次测试,这次把着陆舱发射到太空中,发现在真空中它们每秒仅消耗0.21单位燃料。仅依靠着陆舱内的燃料,我们的RCS(反作用控制系统)有超过71秒的燃烧时间。这足够吗? 答案是,这取决于你的对接技巧。有一些不错的对接指南,但如果我们只在最终接近和平移机动时使用RCS,并且将RCS推进器布置得足够好以减少推力浪费,71秒的RCS时间实际上远超我们的需求。 考虑到我们尽量保持着陆舱的轻量化,而且它旋转速度相当快,我们可以用主引擎完成大部分接近机动。 作为参考,在进行对接机动时,我通常在距离目标飞船不到200米时才开始使用RCS。到那时,我会将相对速度降至零,并让两个对接端口对准彼此,所以接下来只需要简单的平移操作,对于2-3吨的航天器来说,71秒的燃烧时间就能轻松完成。 [RTU]这次我们来造点有用的东西怎么样? 看来在这些枯燥的技术讲解之后,我还欠你一个能正常工作的着陆器。那么,我们来造一个重量轻、实用性强且足够灵活的设计,这样基础设计能在生涯模式中让你用一段时间。从一个着陆舱开始,我们安装四根牙签作为着陆腿,放置RCS推进器,顶部安装一个环形燃料箱和对接端口,底部安装三个环形燃料箱,侧面安装四台“抽搐”引擎,以及四块太阳能电池板,这样我们就不会耗尽电力。
它的质量为2.6吨,初始Δv( deltaV)为1760米/秒,初始推重比(TWR)为2.51,且着陆时保持稳定,但这种特定设计的优势是什么呢? 它易于重新配置以满足不同的任务参数。假设我们想要在重力较低的卫星上着陆,只需移除一个环形燃料箱即可。

现在我们看到的是2.26吨,1440米/秒的ΔV(DeltaV),初始推重比为2.88。如果我们尝试登陆像吉利(Gilly)这样的低重力卫星,我们会减少一个燃料箱,移除“抽搐”(Twitch)引擎,并用单个“火花”(Spark)引擎替换它们。

重量不到1.7吨,初始推重比1.1时的ΔV(DeltaV)超过1300米/秒,这对于极低重力环境来说已经足够,较大的ΔV甚至能让我们在那里进行多次着陆。 你现在可能已经有了自己的调整想法,我建议你多做些实验,看看它在实际操作中的表现,然后自己判断还能进一步优化哪些地方。

设计上的一个小改动是可以使用更坚固的LT-1着陆腿,并像上图所示那样将它们安装在燃料罐的最顶部,同时重新布置太阳能电池板。 LT-1着陆腿的底部间距稍大,这增加了稳定性,但也会略微降低你的ΔV和推重比(TWR),并增加一点质量。 如何将这个部件连接到我的火箭上? 由于我们要重复使用着陆器,首先要做的可能是将其设为子部件。为了使其可连接,我们需要设置根节点和想要作为连接点的位置。

在VAB中点击相应按钮,系统会提示你“定义根节点”。我们希望根节点是登月舱,所以点击登月舱。 接下来系统会提示“选择要附着的节点”,为了操作简便,我们选择对接端口。点击对接端口后设置完成,此时登月舱会吸附在光标上,对接端口会显示绿色附着节点,你可以将其拖放到子部件放置区。 然后你可以建造火箭,在指令舱顶部安装一个对接端口。从子部件选项卡中选择登月舱,将其翻转,然后连接两个对接端口。 现在你可能需要在指令舱和已连接的登月舱周围安装整流罩,这样就可以准备发射了。工程报告可能会提示指令舱安装方向错误,但这并非实际问题,你可以放心忽略。 不过这样还不够理想。使用默认整流罩时,我尚未找到将着陆器置于指令舱下方的合适方法,但借助模组【ZeroPoint Procedural Fairings】,我们就能很好地实现这一点。 不过我们需要一个不同的子部件,这次我们将选择底部燃料箱作为连接节点,因为我们的着陆器将置于整流罩内,与指令舱朝向一致。 我们首先建造指令舱,然后在其下方安装一个级间整流罩适配器,在适配器上放置一个分离器,再将着陆器连接到分离器上,整个结构看起来会是这样的:
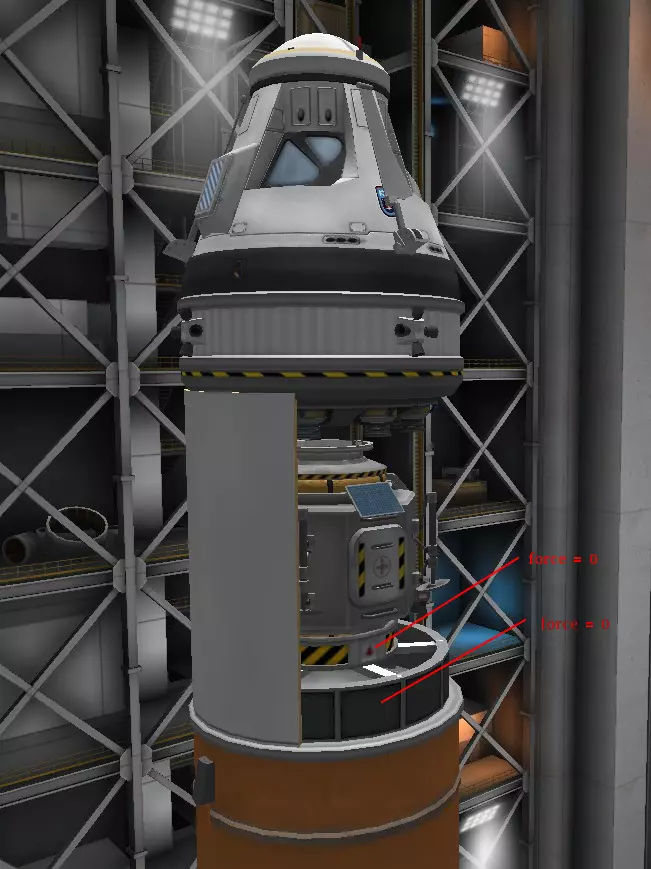
我只安装了一块整流罩壁板,这样你就能看到着陆器了。要让这个装置正常工作,非常重要的一点是将级间适配器和分离器的分离力都设置为零。 原因是我们不希望着陆器在分离时直接撞上指令舱,或者产生任何扭矩。由于它没有探针核心,将无法被控制,如果它发生旋转或移动不稳,我们的对接程序几乎就不可能成功了。 另外,确保级间适配器、分离器和整流罩壁板都处于同一级。 快进一下,我们现在在接近米马斯的太空中。首先我们需要稳定飞船,它绝对不能有任何旋转。我们按下了分离按钮,转移级随之脱离,整流罩也已抛掉,着陆器和指令舱现在应该在缓慢漂移。 接下来进入对接模式,开启RCS,将指令舱缓慢后退几米。旋转指令舱,确保不会撞到着陆器。
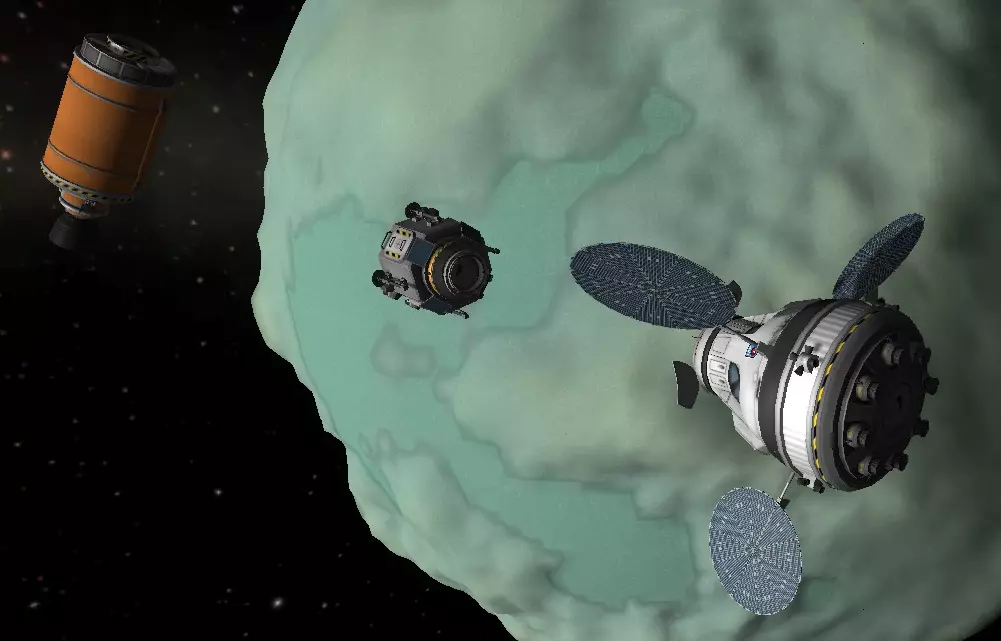
我们得快点行动,但必须小心,因为这两艘飞船会不可避免地产生轻微旋转,如果操作时间太长,难度会大大增加。 如果我们现在撞上着陆器,它很可能会剧烈旋转,我们的操作就全毁了,所以要慢慢靠近,希望能达到这样的效果:
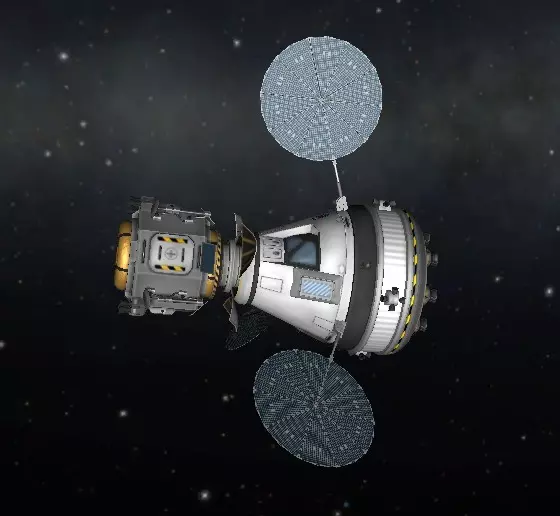
注意:图片中的指令舱和薄型引擎来自NearFutureSpacecraft,太阳能电池板来自NearFutureSolar,薄型燃料箱来自Munar Industries Fuel Tanks。 那 Dres( Dres 是游戏《坎巴拉太空计划》中的一颗行星,中文通常称为“ Dres ”)呢? 由于 Dres 有大气层,这会稍微改变我们的计划,即便其大气层不像 Kerbin(《坎巴拉太空计划》中的主行星,中文官方译名为“ 坎星 ”)的大气层那么浓厚,但它仍能通过降落伞帮助我们大幅减速航天器。 为了让对接过程尽可能简单,我们将首先建造着陆器的轨道级。这里只需要少量燃料用于机动,但由于没有足够小的燃料箱满足我们的需求,我们将使用一个环形燃料箱和四台“ Spider ”引擎。
我们将降落伞连接到着陆舱上,这样可以自动调整姿态,因此无需过多担心着陆腿的问题。完成这一步后,只需添加一个分离器,然后安装上升级——这里使用一个中型燃料箱和一台“梗犬”发动机。着陆腿也安装在这里,同样要将离地间隙保持在我们觉得合适的最小范围内。

我们希望尽可能利用大气的制动能力,因此需要采用浅度再入方式,以最大化在大气层中的飞行时间。 大气层的厚度不足以真正需要隔热罩,而且安装一个足以覆盖整个航天器的隔热罩会带来气动问题,所以我们忽略了这一点。 我们也不希望太晚部署降落伞,同时要记住,在稀薄的大气层中降落伞的效率会大幅降低,仅靠它们不足以将我们的速度降至临界速度以下。我们要做的是在非常接近地表时进行最终着陆制动。为了增加更好的安全余量,或许可以在中型燃料箱上方再添加一个小型燃料箱,并使用四台“抽搐”引擎辅助“梗犬”引擎;或者,如果你实在担心出问题,可以用双“雷暴”引擎配置来替代“梗犬”引擎。 在登达 Kerbin 的卫星 Duna 时,多带降落伞总是没错的,只需确保它们对称放置,并且始终位于质心上方。 关于 deltaV(德尔塔-V)的经验法则是:如果你的着陆器有足够的 deltaV 从 Kerbin 进入太空,那么它就有足够的 deltaV 在 Duna 建立轨道。