换一换
换一换 





在本指南中,我将介绍自己首次实现数据电缆系统的方法。这或许能帮助你使用这个功能强大但操作复杂的工具。 背景 我开始了新游戏,并设定了以下目标:

不幸的是,最初的着陆点距离资源节点太远,无法顺利发展。所以我把工厂搬到了大约3公里外的地方。当我终于开始向空间站派遣无人机时,货船完成航程花费的时间太长,尽管我有8个运输船港口,还是无法获得足够的【Firmalite Bar】。在YouTube上,我看到一个视频(抱歉,我忘了那个视频的参考信息),有人解释说,要提高货船往返空间站的效率,必须将货船港口放置在地理坐标0/0处,并尽可能选择最高的海拔(我这里是200)。

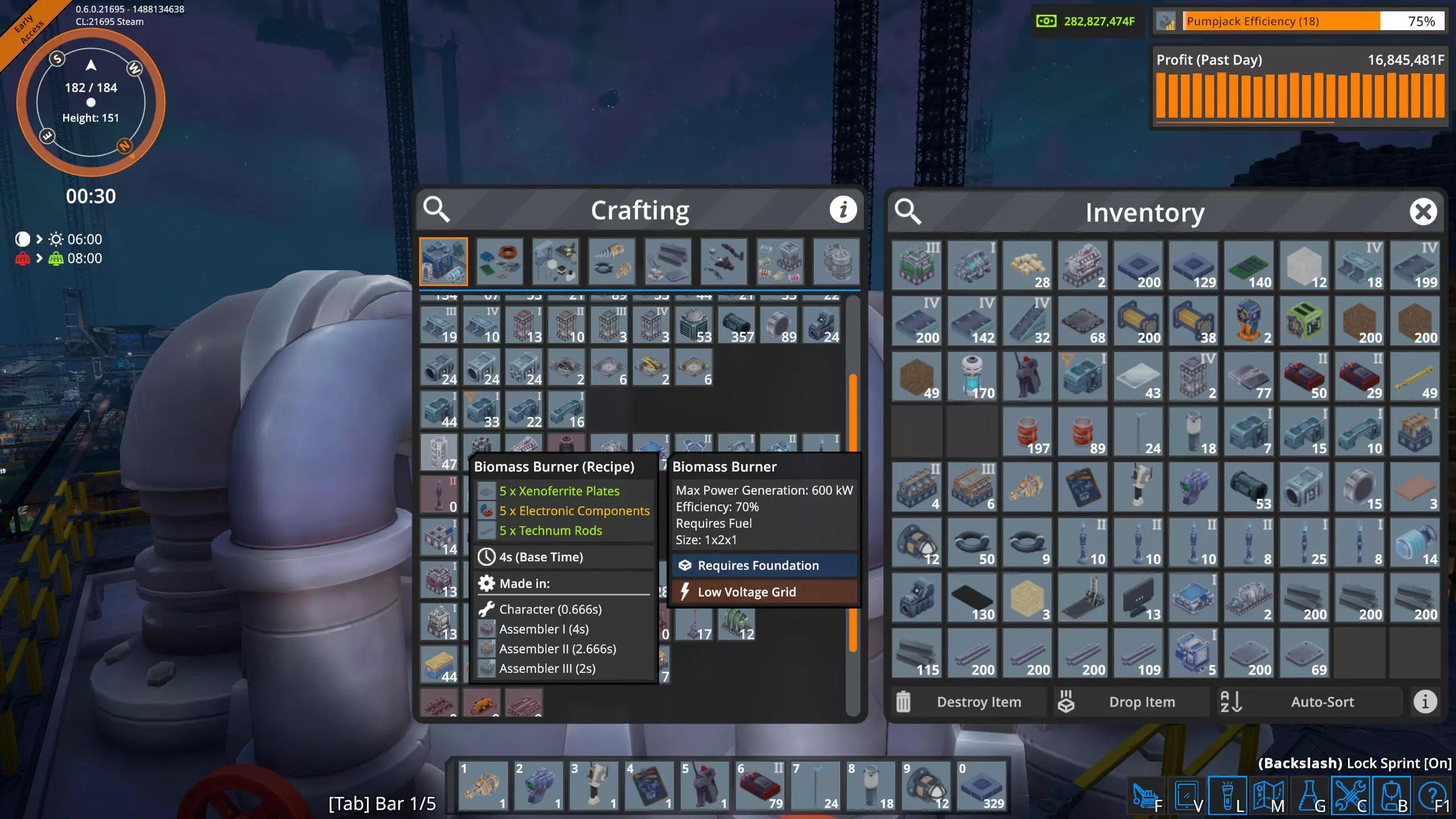
因此,我在这个【0/0/200】位置和工厂之间建造了传送带,用于用无人机交换法玛莱特锭。 关于机器人,销售仓库(装配线)无法与装配线生产器和装配线涂装器分离。 所以我决定在那个【0/0/200】位置建造机器人装配线。
问题在于要将所有机器人身体部件通过一条传送带输送,同时防止任何部件发生溢出。这时,【数据电缆系统】就派上用场了。
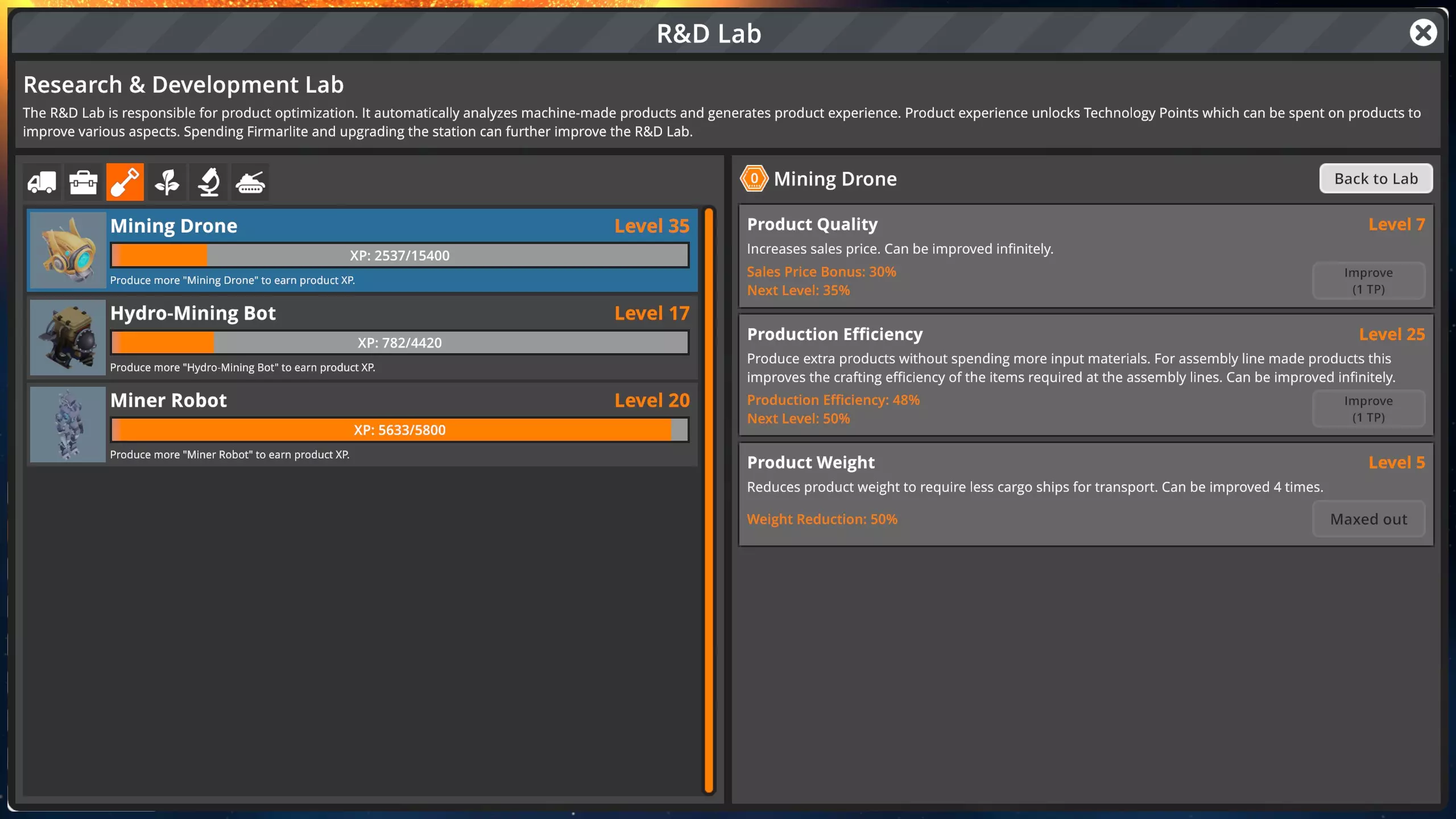
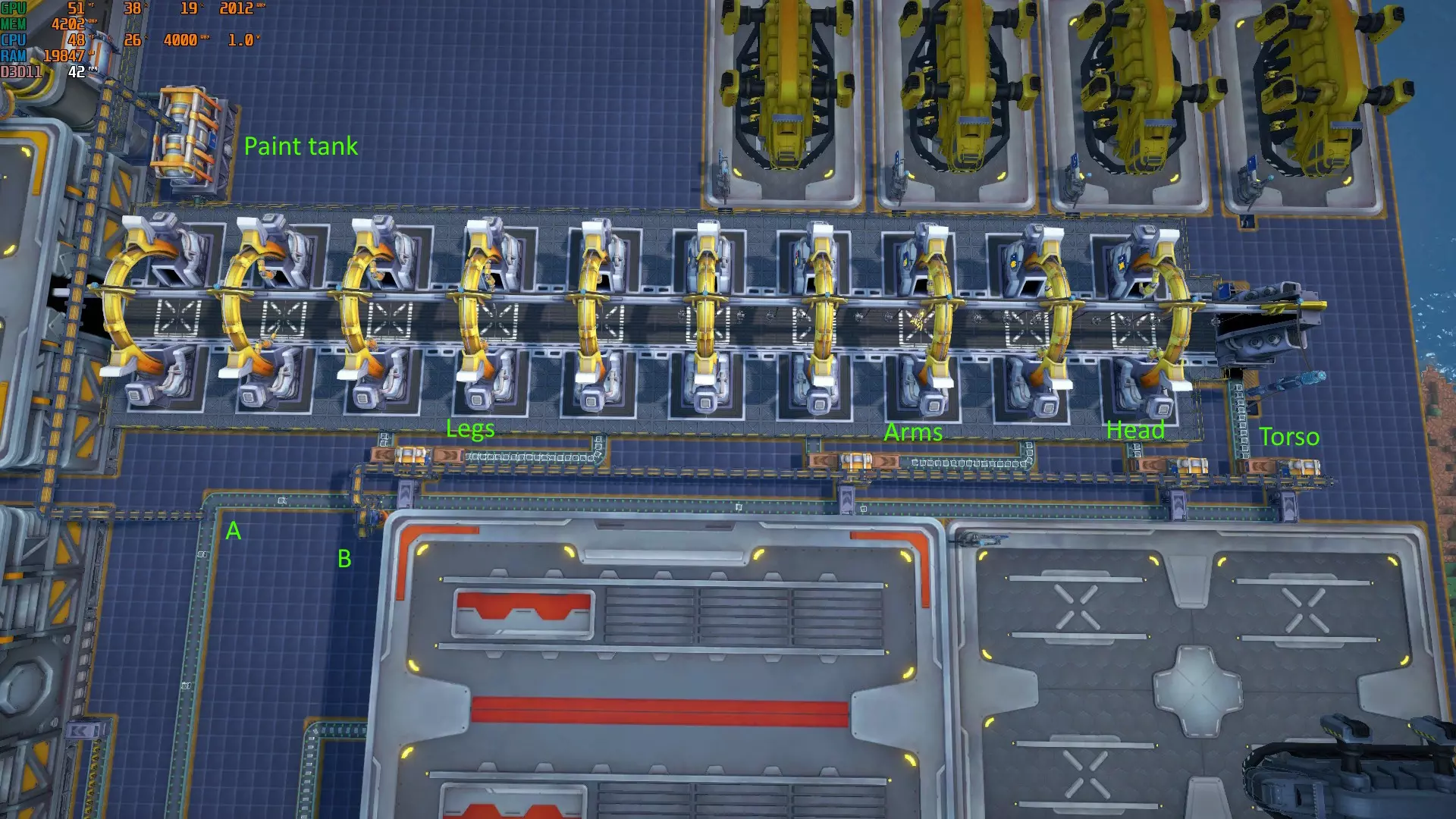
工厂区域 机器人零件在工厂内的组织方式如下:
容器 每个机器人部件单独存放于一个容器中。 头部 躯干 腿部 手臂 机器人部件数量逻辑 目的是确保每个容器中始终保留足够的部件来组装一个全新的机器人。我自愿不考虑传送带上的部件。
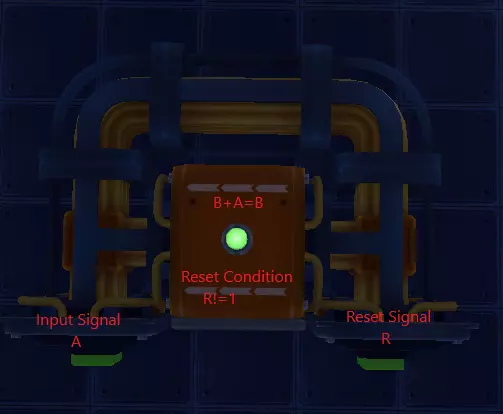
请注意每个组件顶部的箭头方向! 以下是各组件的配置: A:若至少保留一个Head,则发送信号H=1。
若至少保留一个躯干,则发送信号T=1。

若至少保留两个臂,则发送信号A=1。
如果至少保留两条腿,则发送信号L=1。
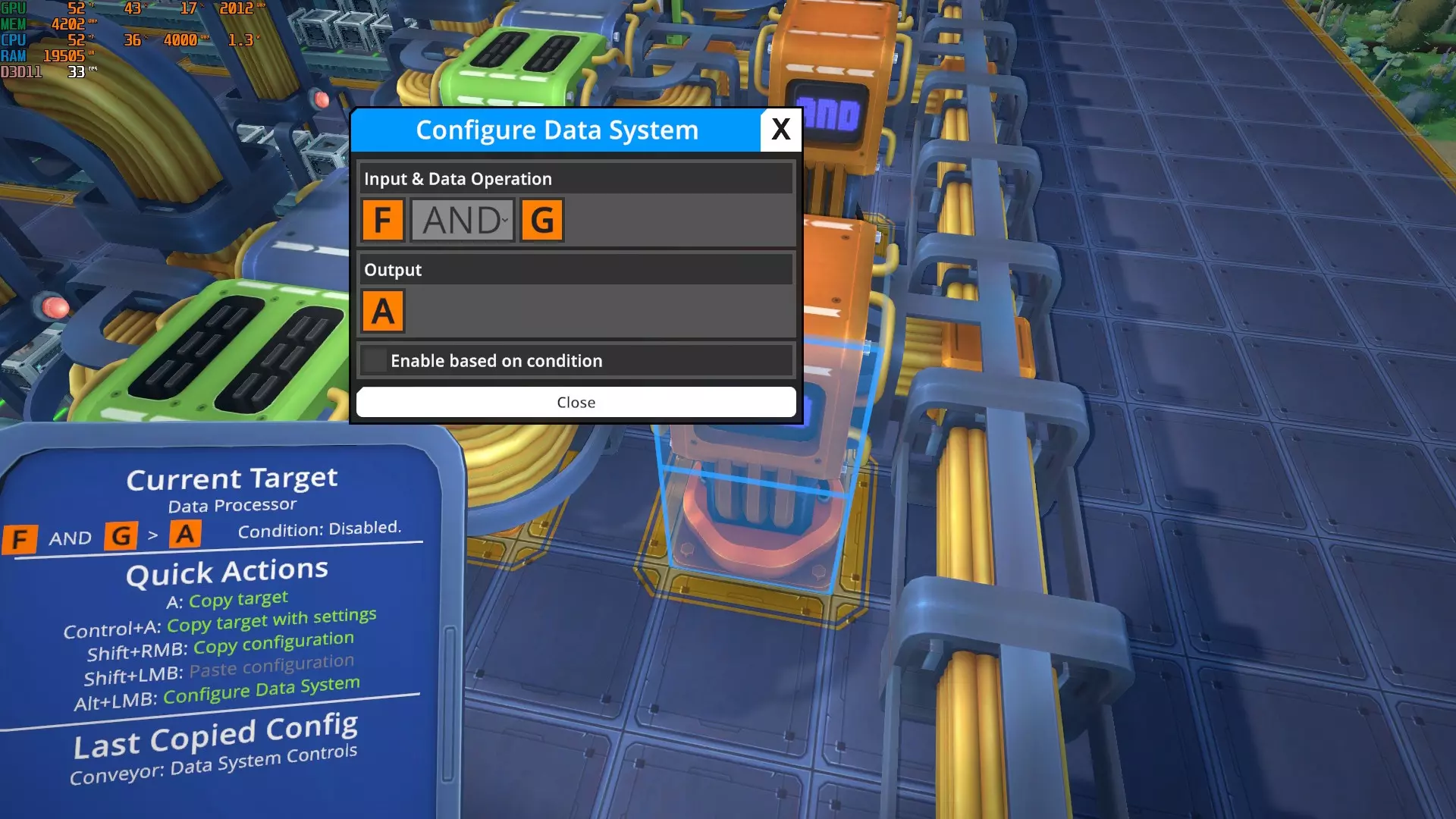
如果头部(H)和躯干(T)足够,则发送信号B。
如果有足够的手臂(A)和腿部(L),则发送信号M。
如果收集到足够的所有部件,就发送信号G。
计时器 为什么需要计时器? 因为我想调节机器人零件输送到机器人装配线的吞吐量。 目前的设置是每2秒输送1套零件。
以下是各组件的配置: A只是一个用于初始化循环的可选开关(按钮)。 建议在完成计时器构建后按下该按钮。 初始(C)值设为120,因为数据电缆系统每秒评估60次(120/60=2秒)。
如果循环(C)达到0,则将计数器(C)重新初始化为120。
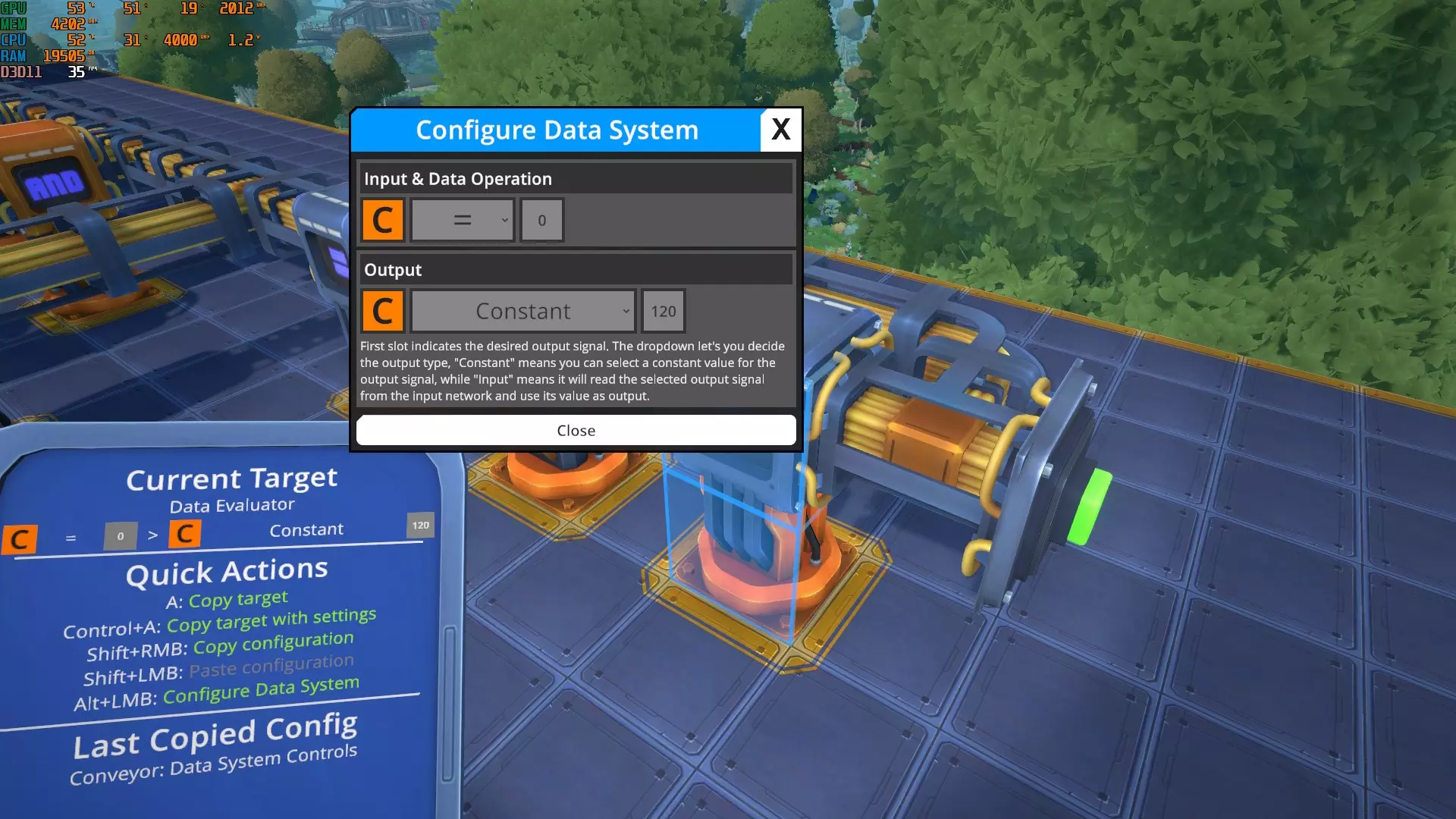
C语言的While循环(C)在大于0时减1。
当循环(C)达到0(表示2秒延迟结束)时,发送信号F=1

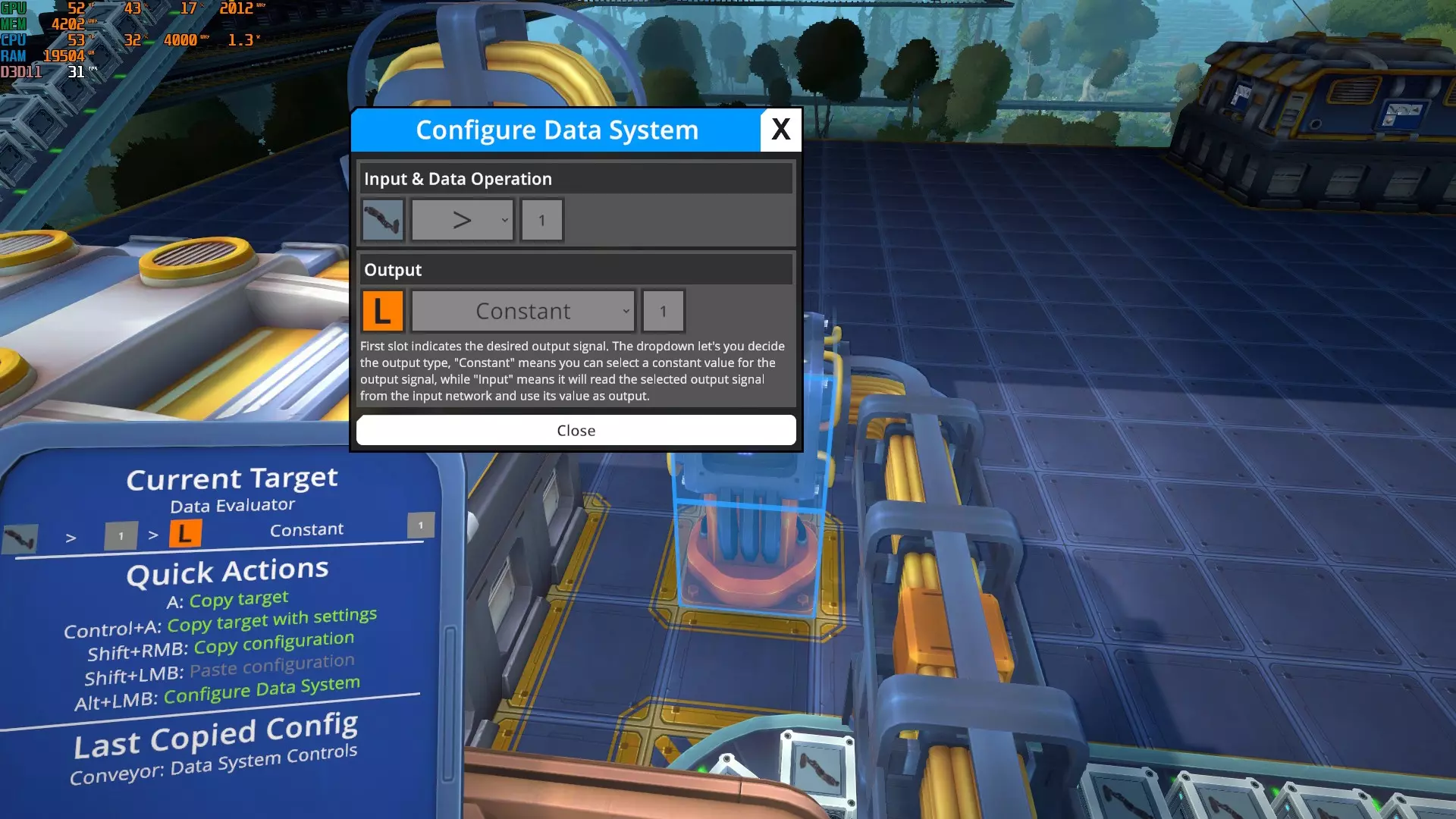
用于输送零件的开关 每个零件都通过专用传送带输送(腿部和臂部各2条),传送带末端设有控制器,用于阻挡或允许零件通过。 当满足所有条件(容器内零件数量充足+计时器触发+开关(操纵杆)开启)时,控制器允许每条传送带通过一个零件。 我们需要让控制器保持开启足够长的时间,以让零件通过(这就是我们记忆信号A的原因)。当传送带输送完零件后,传送带会发送一个脉冲,该脉冲将被另一个组件捕获,进而触发信号R,以停止信号A并关闭控制器。
各组件配置如下: 一个用于启动/停止发送零件的开关(拉杆)。 若允许发送,则输出信号O=1;否则不发送O信号。
如果接收到来自容器的信号G和来自开关的信号O,则我们转发信号G。

我们记住并持续触发信号A(来自下方的组件E),直到接收到信号R。

当传送带确认已发送一个部件(此处为头部)(从脉冲装置发出)时,会发送信号R以重置/清除内存(即上方的组件C)。当然,“头部”必须替换为传送带上的实际部件(存在通用物品,但在此阶段不想增加复杂度)。
当接收到来自计时器的信号F和来自开关/容器的信号G时,开始发送一个零件(触发信号A)。
当信号A=1时,传送带允许输送零件;当输送一个零件后,会发送一个脉冲信号(由上方的组件D捕获)。
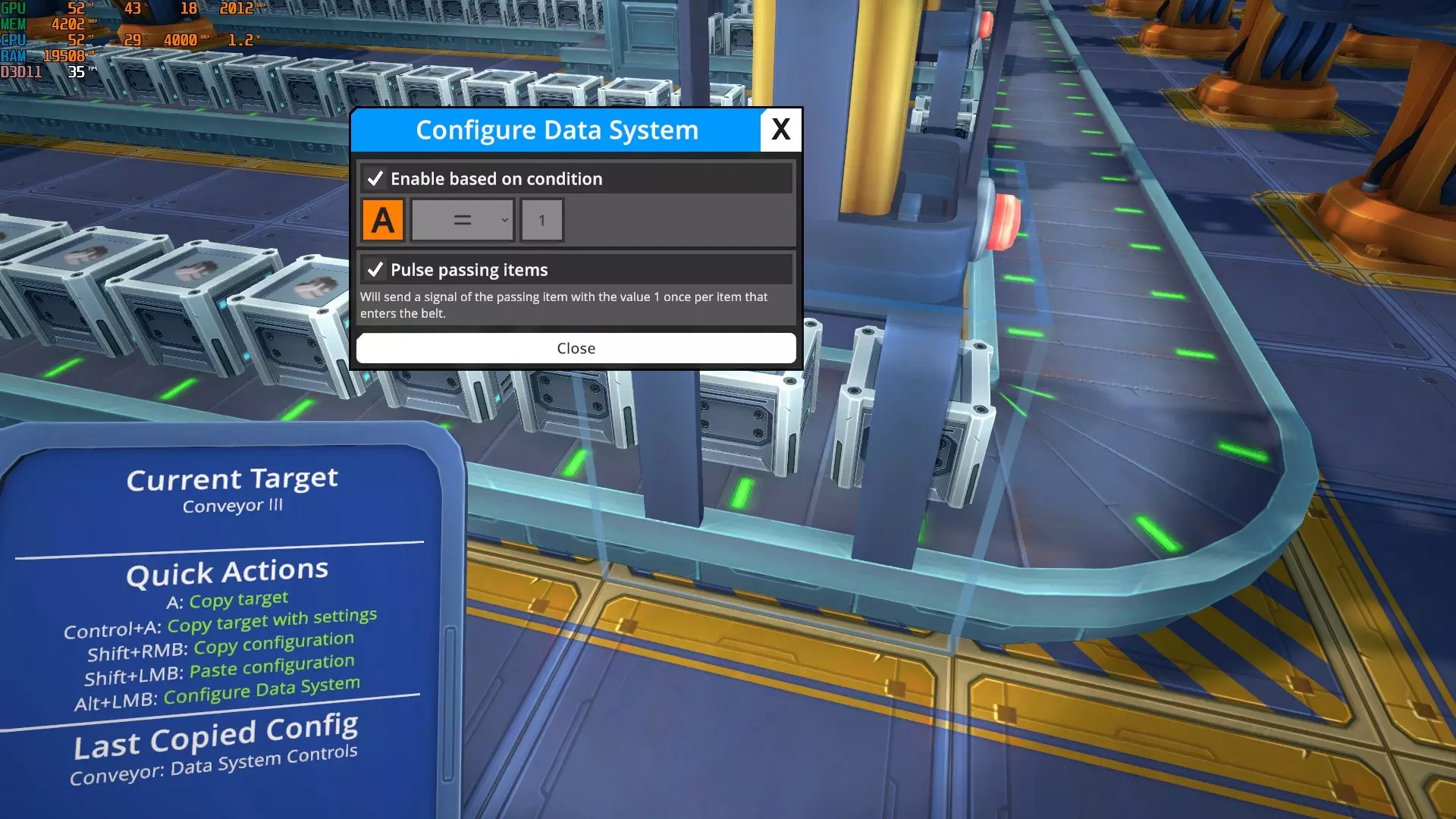
机器人装配线侧 机器人装配线不管理数据电缆系统。 这就是零件流程如此设计的原因。 所有零件都通过一条传送带(长度超过3公里……)送达,因此在需要时,零件可以在那里堆叠。 每条装配线的组装机必须从传送带上拾取正确的零件。 为此,使用过滤器装载机向容器供料,零件再从容器输送至装配线。 这样做的目的是防止容器过载而无法接收更多零件。 一旦发生这种情况,零件将跳过该容器,继续输送至传送带末端,并可能堵塞其他容器。
有两种控制方式可以阻止新部件进入容器: 1. 涂料罐太空 2. 至少有一个容器的填充量超过某一等级 涂料罐太空:从涂料罐引出的数据线路连接到传送带。 只有当涂料罐内的容量大于3000时,传送带才允许部件通过。
至少有一个容器已满且超过一级。一条数据线连接所有容器并终止于传送带。
当容器不为空时,它会将其内容广播到数据线上。

当信号S不等于1时,传送带允许零件通过。
如果至少有一个容器中的物品数量大于或等于60,则发送信号S=1。限制设置为60是因为在此位置和容器之间可能存在其他部件。