换一换
换一换 





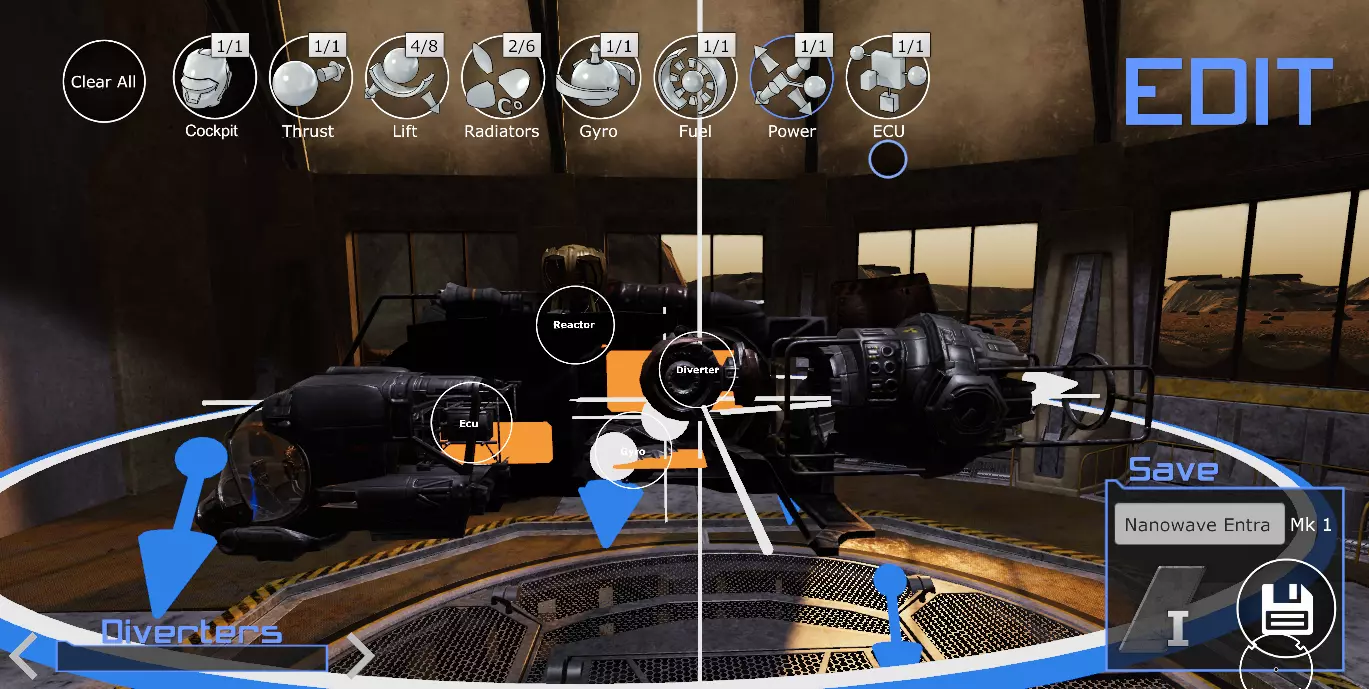
本指南将深入介绍如何在《Vector 36》中使用ECU来优化你的滑行艇操控。 简介 ECU用于自定义滑行艇各部件的运行方式,充分了解其功能可显著提升你的载具性能。 本指南将概述ECU的功能,并提供调整滑行艇的具体操作说明。

ECU的基本操作:输入与输出 ECU允许你重新配置特定组件对输入的响应方式。 “输入”指游戏控制中定义的控制轴,例如:垂直(俯仰)、水平(偏航)、方向舵(横滚)。 “输出”控制特定组件对上述输入的响应方式,例如:方向舵右偏可能会使右侧升力向量增加升力,而左侧升力向量产生反向升力。 ECU还允许你为输出指定范围,可以是运动范围或力的百分比。
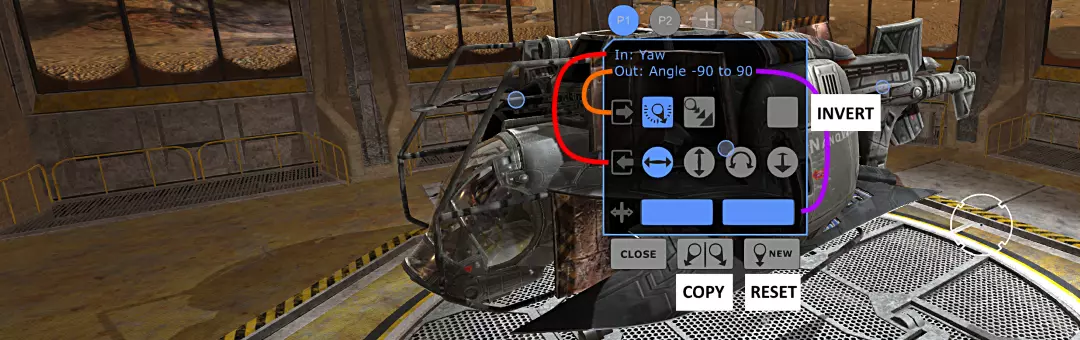
虽然一对升力向量中的每个向量都可以独立设置ECU,但这很容易让你的浮行艇变得无法驾驶。使用【复制】按钮可复制一对升力向量之间的设置。 如果你的实验出现问题导致浮行艇失控,可以使用【新建】按钮重置该部件的ECU设置。 【反转】按钮会将特定部件标记为响应反向控制。在我们配置“横滚”时会对此进行更详细的说明。 【+】按钮允许你为部件添加额外的输入源。默认情况下,你的部件仅响应2个源(例如俯仰和偏航)。在我们配置“横滚”时会对此进行更详细的说明。 配置分流器 可以将分流器视为浮行艇的引擎。它提供的所有动力会分配到你的飞行器的主推力矢量和升力矢量之间。我们要找到能输送给主推进器的最大功率,并设计飞行器使其尽可能频繁地在这些条件下运行。
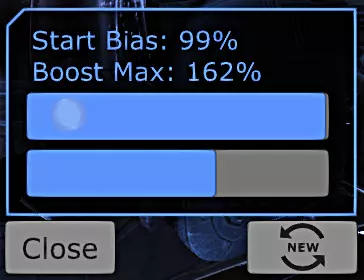
如果你的偏置映射到模拟控制轴,你应该将【Boost Max】值调整到在偏置的最高范围(可能为100%)时使主推力矢量达到“最大输出”。 首先将分流器的功率调至最大,在高偏置下测试你的飞行器,同时使用推进。逐渐降低【Boost Max】值,直到不再发生引擎熄火。 如果你的主推进器在使用推进时没有出现火花,说明你尝试得还不够。你的偏置过低,这会影响你的最高速度。增加偏置直到出现火花。 什么是适合你的飞行器的偏置? 主推力矢量是飞行器最重要的速度来源,因此在保持对飞行器控制的前提下,你的偏置越接近100%,速度就会越快。100%的偏向值可能并非适用于所有载具,因此建议你通过实验找到最适合自己的最高偏向值。 配置主推进器 主推力矢量是为你的滑行艇提供大部分前进动力的装置,同时也是一个重要的升力来源。 如果主推进器的位置与质心成一直线,并以小角度(0-10度)向上倾斜,它将为你的载具提供升力。
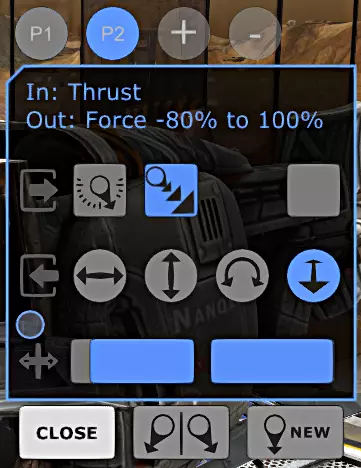
输入:偏航 | 输出角度 此选项可配置主向量的最大水平运动范围。由于主推力向量的功率极强,将其设为+/-90会对滑行器的机动性产生显著影响。 输入:推力 | 输出:力量 此选项可减少导向主推力向量的能量。鉴于主推力向量是你主要的速度来源,没有充分理由降低此数值。 若发现主推力向量在推进时出现火花,可降低分流器设置下的“最大推进”数值。 输入:俯仰 | 输出:角度 尽管此选项可配置,但实际无效。主推力向量无法进行垂直方向的移动,即便已对此进行配置。配置你的升力矢量以实现滚转 方向舵控制是一项高级配置选项,有追求的玩家可以通过其升力矢量的ECU配置来启用该功能。

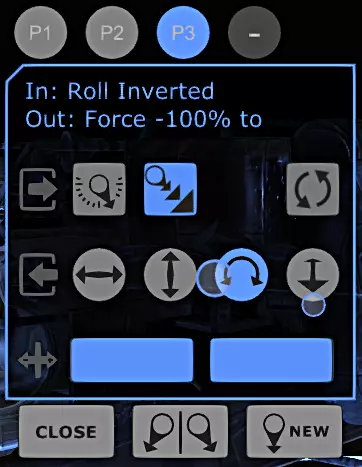
如果操作失误,你随时可以选择“新建”来重置ECU配置。 首先,打开任意一台升力矢量引擎的ECU配置选项。 接下来,点击圆形的“+”按钮,为该升力矢量引擎添加新的输入源。 将“输入”绑定为“横滚”。 将“输出”绑定为“力”。 将最大力和最小力设置为±100。 选择“复制”,将这些设置复制到该升力矢量引擎对的另一台引擎。 我们已接近完成,但目前两台升力矢量引擎在方向舵输入下的运行方式相同。我们希望它们反向运行,从而使飞行器产生机身横滚。 选择其中一台升力矢量引擎,勾选“反转”框。 对飞行器上的每一对升力矢量引擎重复上述操作。输入:俯仰 | 输出:力度 将输出力度设置为你能控制的最低值,同时保持飞行器可控。 降低升力向量的输出力度似乎无法在低偏置百分比时防止升力向量过载,但它应该能减少升力向量的能量消耗,从而在正常使用时为主推进器提供更多可用能量。 输入:偏航 | 输出:角度 如果你的飞行器反应过于灵敏,可以考虑降低此数值,否则保持在±90。