



 换一换
换一换 





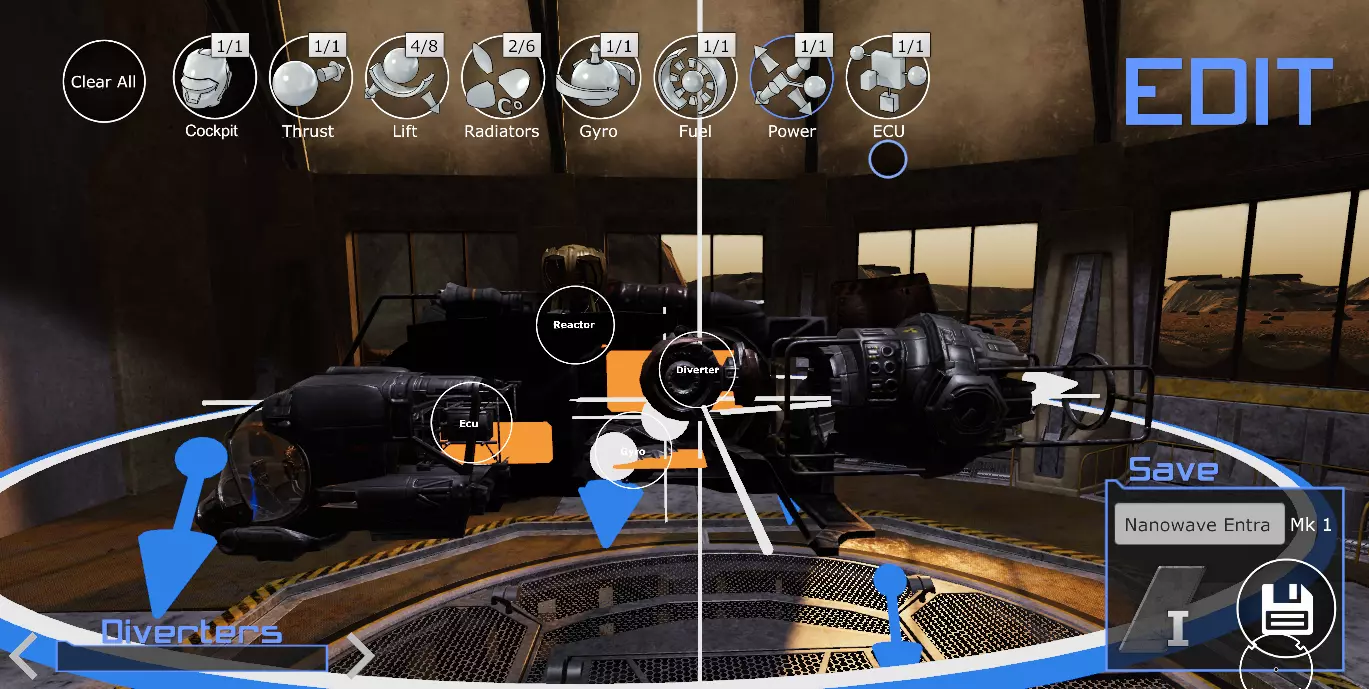
欢迎来到疯狂奥托二手及租赁浮游机店!请进,先安顿一下,在这里、这里还有这里签字,然后我们就可以开始你的浮游机之旅了——了解浮游机的相关知识、如何组装一台浮游机、创建你专属的操控方案,以及思考一些重要的问题,比如“我的天,这里面还有这么多门道?!” 简介。---免责声明--- 通过完成本课程,奥托·冯·库尔(以下简称“所有者”)作为“疯狂奥托的滑行艇租赁与家庭餐厅”(前身为“冯·库尔灭虫与保险公司”,以下简称“公司”)的所有者和经营者,确认客户已接受关于休闲滑行艇原理和操作的充分培训。因此,对于因滑行艇操作和/或使用(无论在公司场所内外)所导致的任何身体伤害、死亡、不适,或任何持久的生理或心理影响、认知分离或存在性倦怠,公司不承担责任。一旦你理解了它们,就可以自由地摆弄零件,随心所欲地打造和定制它们。 三个核心。 让我们进入车库界面的【编辑】模式。为了更直观地查看,点击一个内部组件类别,比如陀螺仪或分流器。顾客另外放弃就因使用本公司场所或自助餐厅而导致的任何身体或心理不适对本公司采取任何法律行动的权利。若发生死亡情况,本公司将向顾客家属提供适当赔偿,形式为一日课程40%折扣券,可在事件发生后一年内兑换,每人限用一张。 嗨!欢迎来到疯狂奥托滑艇租赁!感谢您选择我们为您的生日、婚礼、中年危机或其他特殊场合提供高速、惊险刺激的娱乐服务。我是奥托·冯·库尔,很高兴能作为您的向导,为您介绍一些确保您享受乐趣与安全的要点。要知道,我或许曾五次在“希腊3000”赛事中名列前茅,还是2235年水手谷系列赛的“年度最佳新秀亚军”,但我也记得刚开始“掠行”时那些不起眼的日子。如果你听从我的建议,说不定有一天,你也能登上火星公共网络通讯上的广告,成为焦点呢!不过首先,请确保你已经在门口填写好了免责声明,我们这就从一些基础内容开始。 掠行的艺术。 在我们开始之前,如果你还没完成游戏内教程,请先去完成,熟悉掠行艇的操控和基本功能。如果你已经完成了这些教程,就会发现掠行艇本质上是一种依靠推力而非升力在火星表面行驶的飞行器。简单来说,它可以前进、上升、下降以及左右转向。除此之外,它还能向前推进、通过向上推进实现“跳跃”,并通过“偏置”调整动力与升力比。这听起来可能有点复杂,但本质上,驾驶“掠行艇”归结为两个要素:高度和速度。 高度即速度 你的高度是偏置和俯仰角共同作用的结果。偏置值越高,你的高度就越低;高度越低,升力向量的抓地力就越强。你的目标是在不使掠行艇因微小颠簸而擦地的前提下,尽可能保持较高的偏置值(对我而言,通常在68-70%左右),并通过俯仰角来适应地形。你需要尽量减少使用“跳跃”按钮,通过应对地面凹陷、斜坡等地形,确保你的前进动量不会被抛向空中或撞向地面。这一点很重要,因为…… 速度就是生命 现在,你可能会惊讶地发现,在驾驶“掠行者”(Skimmers)进行比赛时,速度其实有点重要。这是真的!但除了“越快越好”这个事实外,重要的是要明白,你需要先达到一定速度才能变得更快。你的散热器会随着速度的提升而获得更好的冷却效果,因此大多数情况下,保持较高的平均速度比追求瞬间的高速更为重要。没错,如果你在过弯时采用急转弯并配合推进器加速脱离,或许能更快通过那个弯道,但这样做也会让你大幅减速,进而导致过热速度加快,最终反而变慢。在驾驶【掠行艇】时,两种转弯方式都有其适用场景,但理想情况下,能够保持速度的平稳转弯更为可取。就像控制俯仰角度一样,你要尽量避免浪费能量,应尽可能多地将时间用于向前推进,而非侧向移动。 遵循这些原则,驾驶默认配置的【诱捕者】在【夜神环道】进行几圈练习吧。尝试更宽和更窄的转弯,试试短时间脉冲推进而非长时间持续推进,以保持全程更稳定的速度,调节偏航,适当调整俯仰角度以适应地形。一旦你掌握了这一点,就可以出发了!加入顶级联赛,在商店里试试各种不同的滑行艇,尽情享受《Vector 36》的乐趣吧。祝你好运! 不过,你不只是来学习驾驶滑行艇的,对吧? 没错。你来这里是因为你知道还有更多东西。你想捣鼓,想自定义。你想随意摆弄。你想……去钻研那些所谓的……滑行艇改装的“黑科技”。嘿嘿。 既然这样,朋友,不如我们去车库走一趟,让双手……沾满油污怎么样? 喂,别那样看着我,没什么奇怪的,我只是想让自己听起来有点神秘又酷而已。不管了,我们走吧。 滑行艇的构造。 好的!那么,在我们开始学习更高级的飞梭机建造和驾驶知识之前,你需要打开自己的“第三只眼”。别笑,好吗?我还在处理上一个会错意的客户的麻烦事呢。听着,这很简单,你只需要吸气,呼气,想象一只手在拍手,然后专注于以下内容: 飞梭机不过是一堆零件的组合。 就是这样,仅此而已。没那么可怕,对吧?但你要明白,你眼中的飞行器其实就是一个绑着各种部件的金属盒子,每个部件都会独立地完成它们的工作。它能够保持悬停和前进,这只是其与其他部件在位置和功能上相互作用的结果。尽管这是各部件和运行状态之间的复杂平衡,但归根结底,这个金属盒子上所有独立部件的组合会产生三个关键因素:质心、推力中心以及几何基准。你在组装掠行艇时所做的,就是围绕这些中心进行调整。 我不会详细介绍各个组件的具体作用,因为游戏内的参考资料以及Sp4m那份非常出色且详细的指南已经涵盖了这些内容。我的目的是从更高层面解释掠行艇,让你更容易理解建造过程中的基本概念。
参考基准:这只是滑行艇框架的静态参考,其唯一作用是显示部件距离中心的位置。你可以将其他中心设置在离此基准任意远的位置,但它能帮助你评估构建的“特性”。目前,我们先暂时忽略它。 质心:它指示的是安装在滑行艇主体上所有部件的质心位置。如果你想将滑行艇平衡在一根横梁上,横梁就应该放在这个位置:这是你设计的实际中心。理论上它可以位于任何地方,但其位置会影响滑行艇的操控性能以及对操作输入的反应。如果你在后部放置了大量重量,会导致更多的转向过度,甚至可能在转弯时失控。如果将它向前移动得太远,你很可能会出现转向不足,更糟的是,你的【悬浮艇】会在遇到的每一个上坡处发生刮擦。你肯定不想这样,对吧?我就是这么想的。 刚开始时,我的建议是尽量将它放低,并靠近船体前部。这将有助于保持你的【悬浮艇】在转弯时的稳定性,避免转向过度。大多数【悬浮艇】都配备了陀螺仪来辅助控制,虽然你可以把它放在任何位置,但就目前所知,它的位置对模拟效果没有影响。不过,我觉得把它放在中间看起来很酷,哈哈。 【推力中心】 第一部分。 (抱歉!)这是个重要部分。它是你【悬浮艇】的核心与灵魂,也是许多麻烦的根源。推力中心是理解“掠行艇”建造和改装时你需要学习的最重要概念。 推力中心包含两个部分,第一部分就是那个球体本身。理论上它可以位于任何位置,但它标志着升力最强的点。如果你以地面载具为参考,这就相当于其悬挂系统的中心。这意味着,它离质心越近,升力推进器就越容易整体克服重力;而它越靠近某一端,前端或后端就越容易向上抬起。 推力中心的垂直位置还会表明你的排斥力有多强,或者在给定偏置值的情况下,你的“掠行艇”会悬停多高。你需要最大化每个推进器提供的推力,这将帮助你在组装飞船时评估推重比。 根据经验法则,你希望推力中心尽可能低,并且相对位于质心前方,这样能更轻松地应对地形。不过,推力中心与质心越接近,你的【掠行者】操控性就越好。为什么呢?因为你对推进器的许多控制都包括改变它们的角度或功率。这就是推力中心第二个组成部分的作用:蓝色箭头。 推力中心2:加大推力 从这个白色球体伸出的蓝色箭头表示所有升力推进器所施加的向下力的方向。这一点与中心位置共同决定了你的【滑行艇】姿态。
这是一个标准的纳米编织捕获舱。你会注意到它的推力中心略微前倾。这主要是由于其前置推进器的向前朝向,你可以在这里看到。
如果你继续将其开启,你会注意到它有相对于地平线抬高机头的趋势。
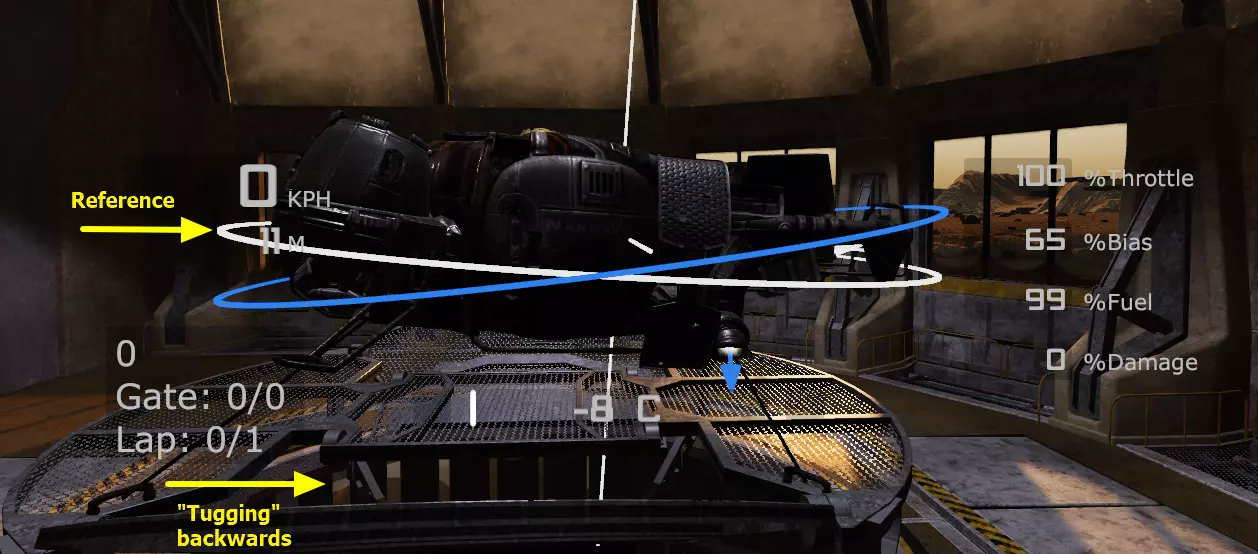
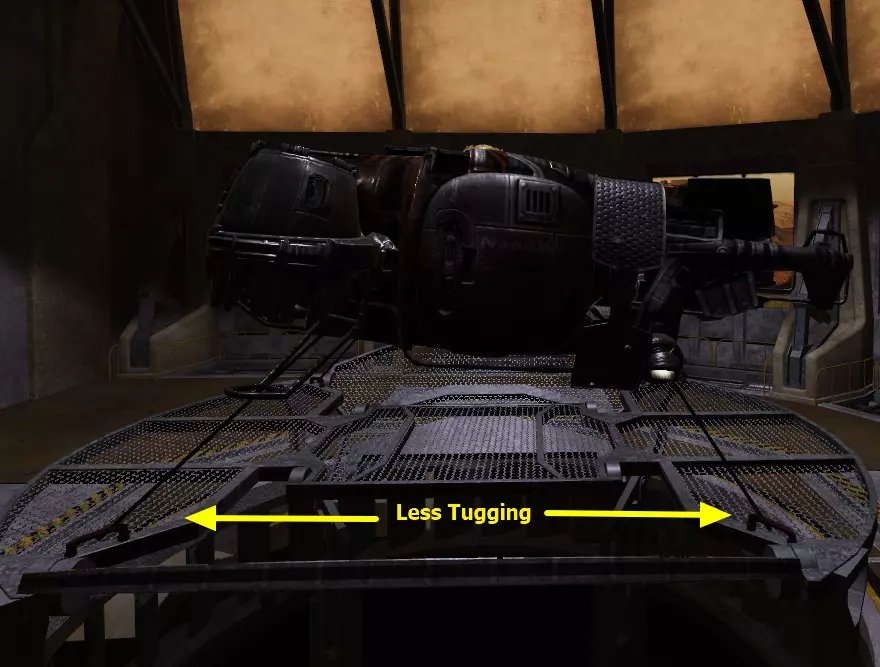
这是因为掠行艇通常更关注前方而非后方,这种设计使其更容易且更安全地操控。前倾既能缓冲高度变化,又能补偿推力中心相对于质心的前移。 你可以通过推力中心的位置及其矢量方向,直观判断掠行艇在无人操控时会抬头、低头还是保持水平。理想情况下,你会希望它尽可能保持水平,但就像我们上面的标准“诱捕舱”一样,让它略微前倾会使掠行艇更易于驾驶。 这也意味着你只需改变推进器的旋转角度,就能静态平衡掠行艇。它们指得越向下,施加的力量就越大,但对颠簸、斜坡和着陆(垂直向下的情况除外)的缓冲效果就越弱。当然,你可以通过移动推进器或安装功率更大的推进器来进一步改变你的推力中心。
现在,关键来了:还记得我跟你说过“掠行者”只是一堆零件的组合吗?没错。相信我,这里面的门道多着呢,但目前重要的是理解:当你移动控制轴时,会影响这些推进器的输出角度和功率,进而改变飞船的推力中心位置。 为了便于演示,我们以这架相同的“诱捕者”原型机为例,启动它,然后将操纵杆向前倾斜。当你向前倾斜操纵杆时,会降低前部反推器的功率,同时增加后部反推器的功率。
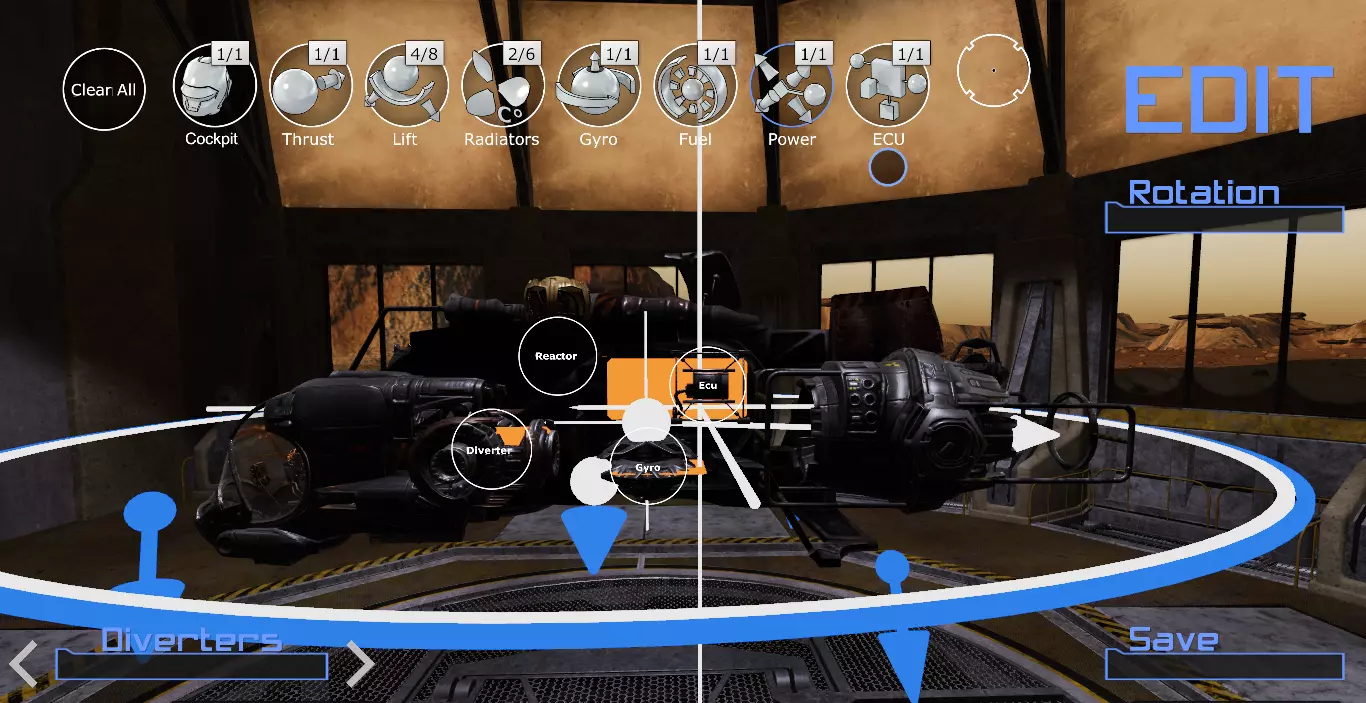
这不仅会影响你的轴输入:当你在“掠行艇”上按下【跳跃】按钮时,你只是触发了一个将偏置设置为10%的超控指令,这意味着它会将90%的分流器能量输送到升力推进器。因此,在(高速)跳跃时,原装的“Entrapod”(恩特拉波德)会比第二个(型号)抬升得更高。 这一切都意味着,对于“掠行艇”而言,一切都取决于这些中心。它们将决定你的“掠行艇”如何运行、对输入如何反应、具有怎样的行为和特性。尽管归根结底还是取决于你的驾驶方式,但理解这些中心能让你将“掠行艇”打造成你想要的样子。 关于中心,还有一个非常非常小的复杂之处,那就是: 推力中心3:啊啊啊快停下。五年前,在你开始阅读本部分内容之前,当你驾驶那台【Entrapod】时,你可能已经注意到,尽管它的中立姿态是机头朝上,但当你启动推进器时,它并非直接升空飞向蓝天。这是因为存在第二个推力中心,该中心主要由你的主推进器控制。你可以打开车库中的“推力”选项卡来更清楚地查看它。
这是你的主推进器的喷射方向。游戏会尝试自动将其与你的质心对齐,但最终,你希望它能尽可能直线向后喷射,同时提供稳定的姿态。在默认的Entrapod(捕获舱)中,推力大致直接作用于质心上方,这意味着它能纠正其推进器布局导致的大部分“向上倾斜”问题,但也可以通过控制其角度进行微调。 那么我们如何通过这些箭头和十字来判断呢?实际上,我们无法准确判断。这就是我们从数据领域进入“凭感觉摸索”的模糊世界的时候了。这时我们需要讨论…… 组装一架掠行者。既然我们已经讨论了各个核心以及它们之间的相互作用,现在请点击你的机库中的【清除全部】按钮,移除你的Entrapod上的所有组件。接下来,我希望你根据自己的需求,使用现有的三个核心重新组装它。内部组件可以放置在指定空间的任何位置,所以你可以按照自己喜欢的方式进行摆放。记得使用升力向量上的【旋转】工具,将它们调整到你想要的方向(你可能需要点击某个内部组件类别才能看到推力核心,所以在调整时要在不同类别之间切换)。 非常重要的注意事项:在编辑你的飞行器时,记得始终保存你的修改!否则修改将不会生效。
你可以通过点击【浮艇】选择菜单上的箭头回到上一个迭代版本。
举个例子,你可以像这样重新组装你的【诱捕舱】。
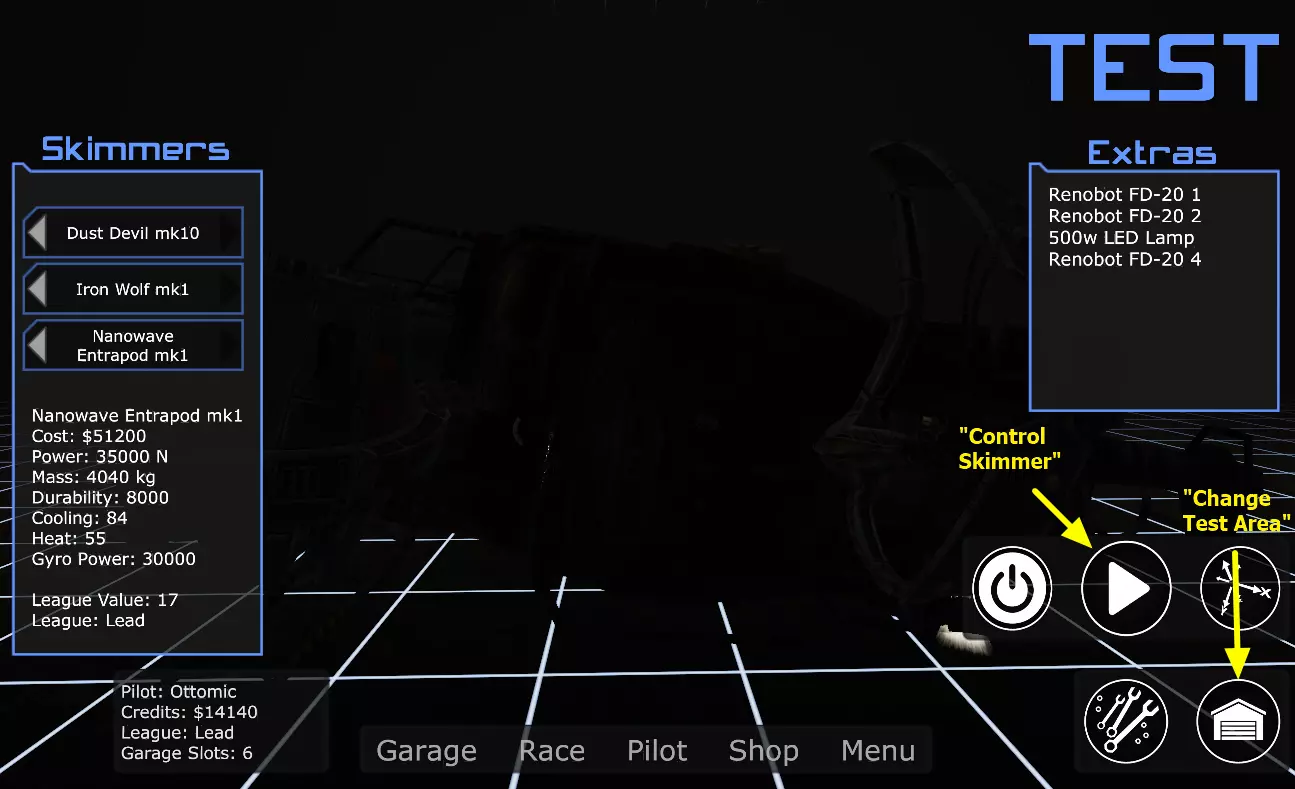
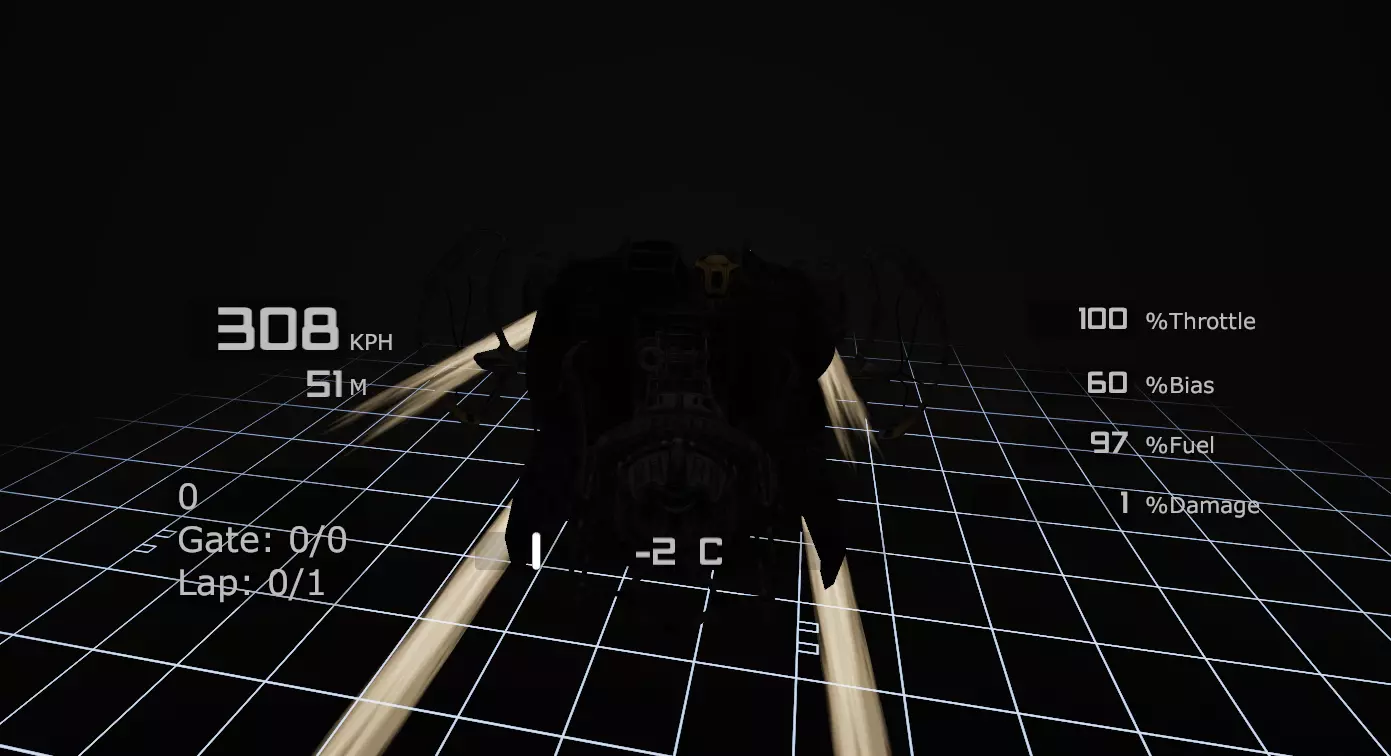
现在,在这个示例中你可以看到我是如何将分流器向前移动并使前向量更向下指向的。当你对大致位置满意后,就可以切换到【全息甲板】测试模式,启动飞行器,不要触碰操纵杆,给它一些推力,然后短暂加速,观察飞船的反应。 (注意:你会在截图中看到显示速度、高度等信息的HUD。出于某种原因,你需要点击【控制飞行器】,退出测试模式,然后再次点击它,HUD才会显示。)
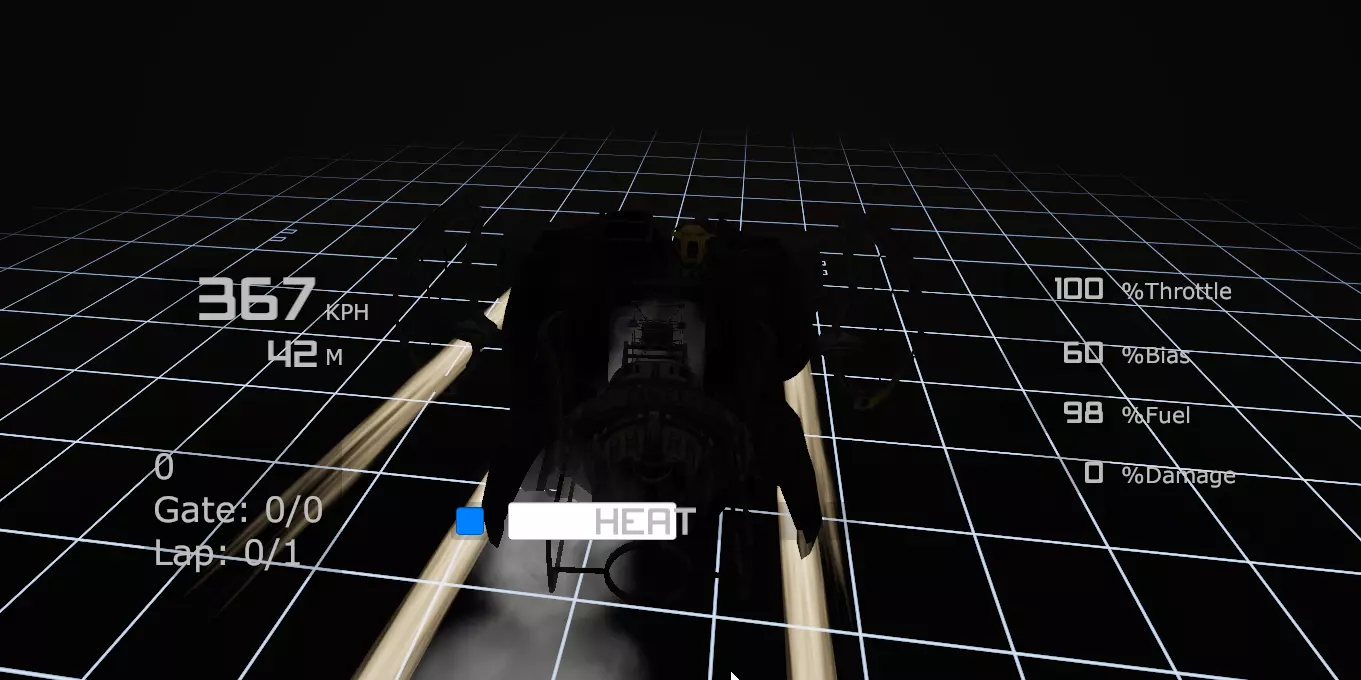
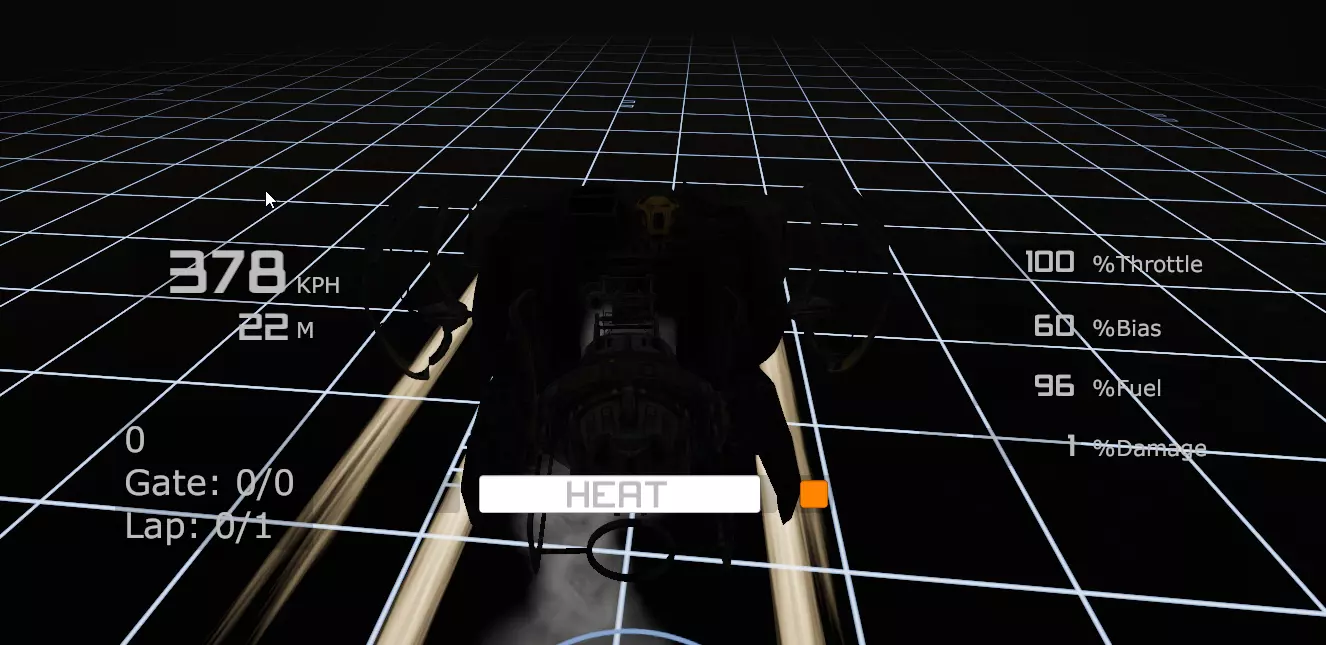
现在,我们的示例悬浮摩托存在一些问题。你看,由于推进中心相对于质心的位置过于靠前,再加上我将推进器垂直向下设置,以及主推进器的安装角度,这意味着前部会试图抬离地面。尽管游戏已尝试补偿主推进器的位置,但悬浮摩托仍会尝试升空,直到升力推进器失去作用,然后才会落回地面。这会导致悬浮摩托在向前推进时产生起伏波动,更糟糕的是,加速会引发失控的抬升效应,将你猛地向上推,从而浪费动量。
要解决这个问题,你可以调整主推进器的角度来减少这种波动。通常情况下,负推进器角度会使你的俯仰角向下,所以如果我想缓解这个问题,我会将角度再调负几度,比如从(在这个例子中)-1度调整到-4度。
好多了。注意到我已经成功达到了更高的速度和更低的高度,但我们仍然获得了略多的升力。让我们把它调整到-8。
现在我遇到了相反的问题。我的飞行状态还是有点不稳定,而且在加速时,我的飞船会朝着地面倾斜。这说明我矫枉过正了,最佳平衡点应该在某个中间位置。现在,如果我把推进器角度调整到-6……
好啦!滑行艇虽然还有些晃动,但波动幅度已经足够稳定,这让我的高度范围窄了很多,而且我能将更多推力集中到想要的方向,从而提高了前进速度。不同的滑行艇配置飞行时的直线性会有所差异,这完全取决于滑行艇各中心的位置。不过,按照这些步骤,你可以在车库里从头到尾打造出一艘能正常运行的滑行艇。 一般来说,你应该尽量将推进器的角度调整到能保持直线飞行的最小角度。这不仅能提高设计的整体效率,还能减少加速对高度的影响,从而提升稳定性。 ……就是这样啦!如果这就是全部,那我会这么说。 但事实并非如此。 我真的非常抱歉。 电子控制单元(ECU)。 好吧,听着。 首先是好消息,你不需要过多摆弄电子控制单元。对于中级掠行者飞行员来说,最多调整一下分流器设置就够了。但完全理解这部分内容,能让你在飞船建造和操控方面获得完全的自由。 要打开电子控制单元配置界面,点击“ECU”标签下方标有“control”的蓝色圆圈。
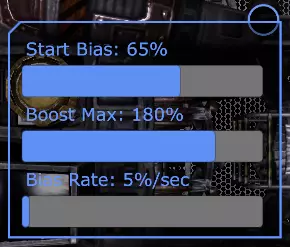
你的ECU控制着飞船上每个推进器和分流器的运行。点击分流器可以设置在你使用推进功能时,它向主推进器输送的推进力比例,还能设置比赛开始时飞船的初始偏航值,以及按住【偏航向上】或【偏航向下】按键时该数值的变化速度。
为什么要限制推进力度?因为这能减少你的【滑行艇】发热,提供更平缓的推进效果,进而让散热器更高效,帮助你延长推进时间。由于热量是呈指数增长的,你的飞船最终还是会过热,但限制推进能让你推进更久,从而获得更稳定的速度,这又会让你冷却得更快,进而能更快再次推进。接下来你只需尝试不同的配置,看看哪种最适合你。 这或许是你唯一需要在【ECU】上调整的设置。不过,为了好玩,我们来看看点击推进器会显示什么。
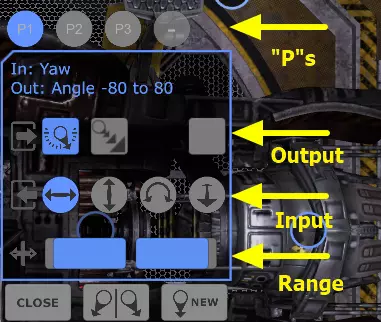
理解这些设置是【每个推进器单独生效】的,这一点非常、非常、极其重要。我知道这听起来像是废话,但你必须牢记这一点。某些操作需要一对推进器中的一个执行某项动作,而另一个执行相反动作,所以如果你调整了它们,要确保每个推进器都配置正确。 【"P"参数】:你的【浮艇】中的每个推进器可以独立执行最多三项操作。你可以为一个轴添加两个动作,或者让每个轴对推进器产生不同的影响。发挥空间很大……只要不超出这些"P"参数的范围就行。 【输出】:你可以控制推进器的角度,或者它输出的功率。功率的含义很直观:你移动轴的幅度越大,该推进器输出的功率就越大。关于其“角度”,组件会根据其安装位置像坦克炮塔一样绕该轴转动。唯一的例外是主推进器,它会像方向舵一样左右转动,其旋转中心位于最前端。 工具提示最右侧的方块是“反转”功能。不出所料,它会将输出与输入反转,因此会将“0”值视为“100%”,反之亦然。不过,这里有一个非常重要的注意事项:对于升力推进器角度这一特定情况,左侧推进器的输出默认已经是镜像的。这意味着你无需单独反转它们。我们将在后面更详细地了解这一点。你将能更轻松地微调姿态,选择是快速通过弯道还是急转弯,并且能更轻松地避开迎面而来的岩石,或是几乎瞬间从漂移中恢复。 现在,最关键的问题是:这比原版控制更好吗? 我也不知道,哈哈。 理论上,使用冯·库尔特技(von Kewl Special)可以减少因快速转向时大幅调整背部推进器角度而造成的推力浪费,并且更容易在保持高速的同时精准通过赛道。但说实话,我没发现我的用时有太大差异,而且这是一种更复杂的控制方式。不过,我个人更喜欢这种方式,用它跑出了我最好的单圈成绩,所以至少它不会更差。归根结底,只要某种方式对你有效,能让你在游戏中获得更多乐趣,那就尽管去享受吧! 就是这样了。真的就这些。如果你能坚持看到这里,我要为你理解《Vector 36》所展现出的毅力和决心点赞。希望你能像我一样欣赏它复杂的机械系统,也希望我能帮你稍微理清它那令人眼花缭乱的复杂性。赛道上见!还有,小心别蹭掉漆。这是ECU将作为参考的轴,无论你将什么设置为输入。无论选择哪个轴,该组件的运行方式始终相同。如果你将推进器设置为俯仰轴,当你移动该轴时,它仍会左右倾斜,与设置为偏航轴时完全一样。它只会读取该轴的值,并将其转换为推进器的角度或功率。 轴的说明如下(从左到右): 偏航:这是摇杆上的X轴(左右移动),在设置中映射为【移动】。 俯仰:这是摇杆上的Y轴(上下移动),在设置中映射为【移动】。 横滚:这是在设置中映射为【方向舵】的轴。 推力:这是在设置中映射为【推力】的轴。范围 这是你想要为该动作设置的上限和下限。在绝大多数情况下,你只希望它是对称的,并且这基本上会决定完整输入能在多大程度上改变输出。 现在,为了更清晰地了解,让我们按轴对默认“掠行者”上设置的不同动作进行分组,看看每个组件对哪些输入做出反应。 当你移动偏航轴时: - 前推进器【P1】会改变角度(改变20度)。 - 后推进器【P1】会改变角度(改变80度!) - 主推进器【P1】会改变角度(同样改变80度!) 当你移动俯仰轴时: - 前推进器【P2】会将功率改变至最高100% - 后推进器【P2】会将功率改变至最高100%(但方向相反) 当你移动方向舵轴时- 右侧前后推进器【P3】的功率将变化至90%。 - 左侧前后推进器【P3】的功率将变化至90%(但为反向)。 当你移动推力轴时: - 主推进器【P2】的推力将在-10%至100%之间变化。 这就是其工作原理。翻滚是通过左侧和侧升力矢量之间的差动推力实现的,5个推进器协同工作赋予了Entrapod标志性的漂移操控感,适合所有玩家。这也意味着,只要稍作调整(和推进器设置),你几乎可以让滑行器完成任何动作。你想用矢量角度而非功率来控制俯仰吗?完全可以!想打造一台漂移机器,或是一台几乎无法转向的导弹吗?当然没问题。想安装更多带有自定义行为的升力推进器?嘿,为什么不装几个巴里斯50型推进器,把它们当作刹车来用呢? ……要不要彻底改造你的整个操控方案?当然可以。 冯·库尔特别版。 我们到了。一切都指向这里。你已经成功掌握了“掠行艇”设计的所有细节,精通了各个核心系统,深入理解了建造“掠行艇”的原理,甚至不惜冒着精神失常的风险,钻研了“电子控制单元”那些令人费解、复杂到抓狂的设置(你签过免责协议的,抱歉!),现在是时候将所有这些知识融会贯通,打造出【雷声轰鸣】冯·库尔特别版了。 实际上,这只是一组需要输入到“电子控制单元”的参数,能让你的“掠行艇”按照我喜欢的方式操控。这会让它们更像飞机而不是汽车,并且通过使用你可操控的三个轴而不是仅两个轴,能让你更精细地控制你的【Skimmer】,使其按照你的意愿行动。这虽然操作更复杂,但最终我对此非常满意,这也是一个很好的例子,展示了你通过ECU设置真正能实现的功能。 我会提供一些参考范围,但你可以根据自己的喜好随意调整。这里重要的是输入和输出。 再次强调,重要的是,这些设置是每个推进器单独的。你必须为每个推进器进行设置。我会按顺序列出每个组件的每个P值。不要偷懒,要逐个进行设置。右前推进器 [P1]:输入:偏航 输出:角度 范围:-40 至 40 [P2]:输入:偏航 输出:反向力 范围:-90 至 90 [P3]:输入:俯仰 输出:力 范围:-100 至 100 左前推进器 [P1]:输入:偏航 输出:角度 范围:-40 至 40 [P2]:输入:偏航 输出:力 范围:-90 至 90 [P3]:输入:俯仰 输出:力 范围:-100 至 100 右后推进器 [P1]:输入:横滚 输出:角度 范围:-80 至 80 [P2]:输入:俯仰 输出:反向力 范围:-80 至 80 [P3]:输入:偏航 输出:反向力 范围:-90 至 90 左后推进器 [P1]:输入:横滚 输出:角度 范围:-80 至 80 [P2]:输入:俯仰 输出:反向力 范围:-80 至 80 [P3]:输入:偏航 输出:力 范围:-90 至 90 主推进器 [P1]:输入:偏航 输出:角度 范围:-50 至 50 [P2]:输入:推力 输出:力 范围:-10 至 100 [P3]:输入:横滚 输出:角度 范围:-80 至 80 我知道这很繁琐,但是确保所有P值设置正确。我们主要是增加前推进器用于【偏航】的角度偏转,并将P3从【滚转】调整到【偏航】。对于后推进器,同样将P3从【滚转】改为【偏航】,同时将P1从【偏航】调整为【滚转】,最后减小主推进器在【偏航】时的偏转角度,并为【滚转】设置一个新的、更大范围的P3值。大致就是这样。 那么我们通过这些调整实现了什么呢?简单来说,现在你拥有两种截然不同的转向方式: - 当你使用主操纵杆转向时,转向动作将仅由前推进器和主推进器完成,同时通过在前、后推进器上施加差动推力使你滚转进入转向。这一点,再加上主推进器角度更为有限的特性,会实现更平缓的【速度转向】,同时尽可能保持向后的推力。 - 然而,当使用方向舵时,你的背部推进器会向相反方向转动近90度,主推进器也会进一步倾斜,从而让你的【飞梭艇】快速转向。(这本质上是常规转向) 这实际上让你能够独立控制飞梭艇的前部和后部,并且可以组合这两种输入来执行【协同转向】,这将帮助你在转向时更好地控制姿态。








