换一换
换一换 





如何设置和调整用于侧倾稳定座椅的PID的快速演示。设置方法
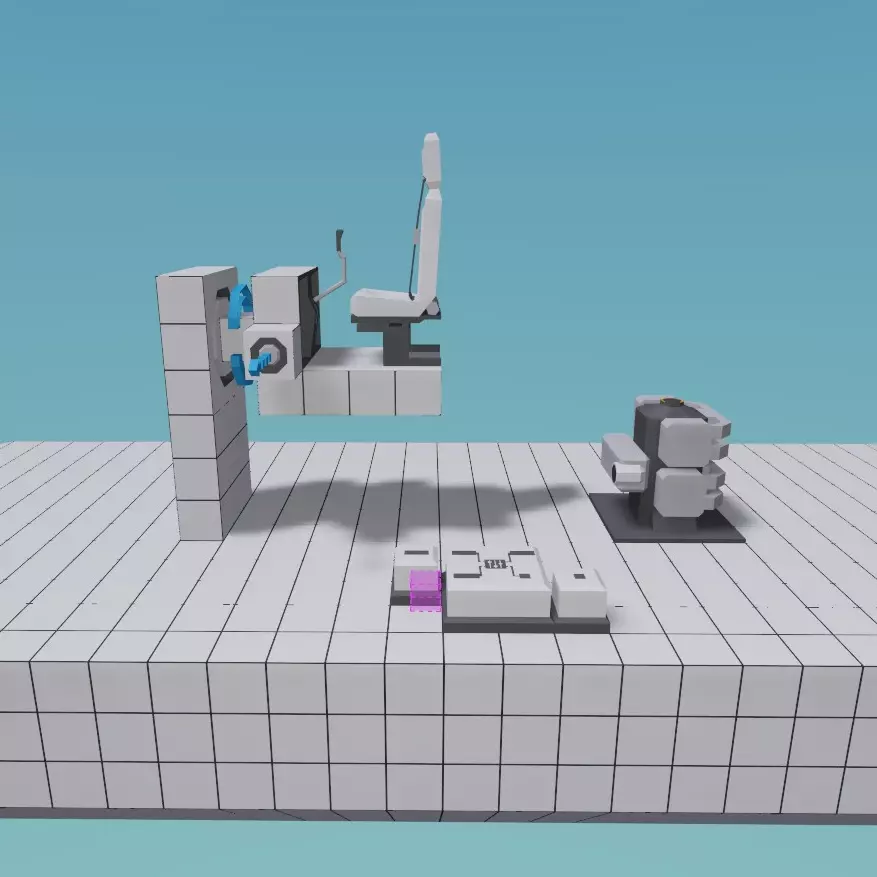
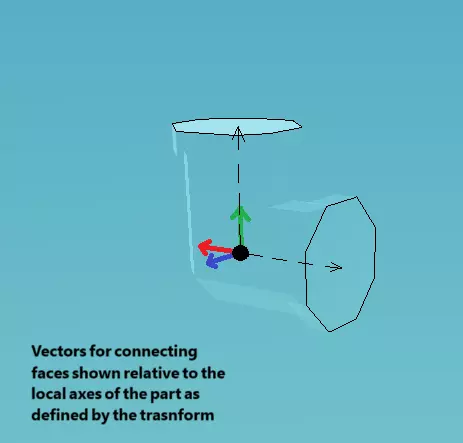
对于PID系统,有四个关键部分: 执行器:这是与外界交互的部件,可以是机械铰链、枢轴、发动机或活塞。在本案例中,我们要防止座椅滚动,所以机械枢轴是明显的选择。无需担心旋转方向。 传感器:为了让系统对环境做出反应,我们需要能对环境进行测量的装置。我们使用倾斜传感器。要测量滚动,需旋转传感器,使其箭头朝向船的侧面。朝向哪一侧无关紧要。确保传感器安装在船的可旋转部件上,而非主体部分。 设定值:这是系统的目标值。我们希望座椅保持完全水平,因此将使用逻辑模块中的【数字】方块。此数值将自动设为零,无需手动更改。 触发信号:用于开启PID控制器。若需控制PID的启停,建议使用开关替代。 切换至逻辑模式,并完成以下步骤: 1. 将PID的【过程变量】连接至倾斜传感器 2. 将PID的【设定值】连接至【数字】门 3. 将PID的【控制输出】连接至机械转轴的【旋转目标】 4. 将PID的【激活】端连接至【触发信号】 PID参数整定 这是大多数人容易困惑的部分,尽管看起来复杂,但其实非常简单。开始前,我们先了解一下PID三个参数的作用。
比例环节: 这是衡量我们与目标值偏差程度的指标。如果测量值与目标值非常接近,P的输出就会很小;反之,如果偏差很大,P的输出就会很大。本质上,P=目标值-测量值。 P承担了大部分工作,但并不完美。想象我们正在为直升机设计自动悬停功能。起初直升机高度过低,目标值与当前位置的偏差很大,发动机便会全力运转以提升高度。一旦达到正确高度,PID系统检测到偏差很小就会关闭发动机。糟糕!这时直升机就会开始下坠。最终,当我们下降时,差距变得足够大,油门会增加,我们会回到原来的高度。这导致我们的直升机不断上下跳动,这可不太理想! 微分: 等一下,我们是不是跳过了I?D是衡量我们向目标移动速度的指标。如果我们正快速冲向目标并可能超过它,D会产生一个相反的力。或者,如果我们正偏离目标,它会增强修正力度。 让我们回到直升机的问题。D不关心我们离目标有多远,只关心我们如何向目标移动。所以想象一下,我们的直升机已经到达了高度。如前所述,这会导致P值下降,我们的直升机应该会开始下坠。D值比P值能更快地检测到这种下坠,并迅速修正直升机姿态。现在我们就能以稳定的高度平稳飞行了。 调试步骤: 1. 在编辑器中切换到【选择】工具,点击PID控制器,将所有变量设为零。 2. 从P值开始调试,先将P值设为一个较低的数值,比如0.1。生成载具并观察其反应。 3. 如果系统反应不足(即达到目标的速度太慢),我们需要增大P值。由于数值可能变化很大,我通常会将之前的数值翻倍。 4. 如果系统反应过度(即修正旋转幅度过大,导致向相反方向倾斜),我们需要减小P值。 5. 如果系统朝错误方向移动(即船只发生倾斜时,座椅的倾斜幅度甚至更大。我们需要反转输出,将所有数值设为负数。 完成上述步骤后,座椅就能较好地应对海浪了。但你可能会发现它有点“醉态”,像钟摆一样左右摇摆。 如果系统摆动缓慢,从0.1这样的低值开始增大D值。 如果系统快速振动,则说明D值过高,需要减小。 基本上就是这些了。记住,从P值开始调节,在调整到最佳状态前,保持其他所有变量为零。我会在之后添加更复杂的指南,其中将包含I值和多个PID控制器的内容。