换一换
换一换 





### 简介 本文是《DARKNESS' Das Book》表格与地图收集模组的配套指南。 本指南将教你如何通过让船只穿过一条固定线来测量其速度。实际上,这条固定线可以是任何物体,比如自然地形特征或光学工具。 本指南将以光学工具为基础,即使用潜望镜分划板上的固定标线作为参照线。 ### 数学原理 免责声明:若你只想有效使用此方法,无需了解以下内容。本节仅面向对此感兴趣的玩家。如果你完全不喜欢数学,可跳过本节,这不会影响你对该方法的实际应用。 该方法的基础是简单的关系式: **速度 = 距离 / 时间**最简单的情况是让目标穿过你的0°(或180°)方位线,此时方位变化率为零。我将此称为“零方位法”(ZeroBearing method)。在这种情况下,不会产生横向移动,可直接使用公式1。由于你记录了目标从舰首到舰尾穿过瞄准线所需的时间,因此距离始终等于舰船长度。 另一种特殊情况是你与目标航向平行(平行方位法),此时方位变化率最大。这时,你必须通过修正平行移动的横向速度来调整公式1: 目标速度 =(目标距离 + 己方距离)/ 时间 = 测量速度 + 己方速度。 [2] 这仍然很简单,因为你知道自己的速度。最常见也最复杂的情况是,当你处于任意航向(通用方位)且方位变化率任意时。此时,式1还需要通过平行运动进行修正,但这次的平行运动不等于你自身的运动,而是其平行分量: velocity_target = [distance_target + distance_own * tan(theta)] / time = velocity_measured + velocity_own * tan(theta). [3] 敏锐的人会发现这是一个近似值。当你以大约90°的舷角接近目标时,该近似值的效果最佳。 以下是上述三种情况的基本示意图:
图1:展示固定线法两种特殊情况及一般情况的示意图。未按比例绘制。 表格与方法 以下表格可用于根据已知目标长度计算距离:
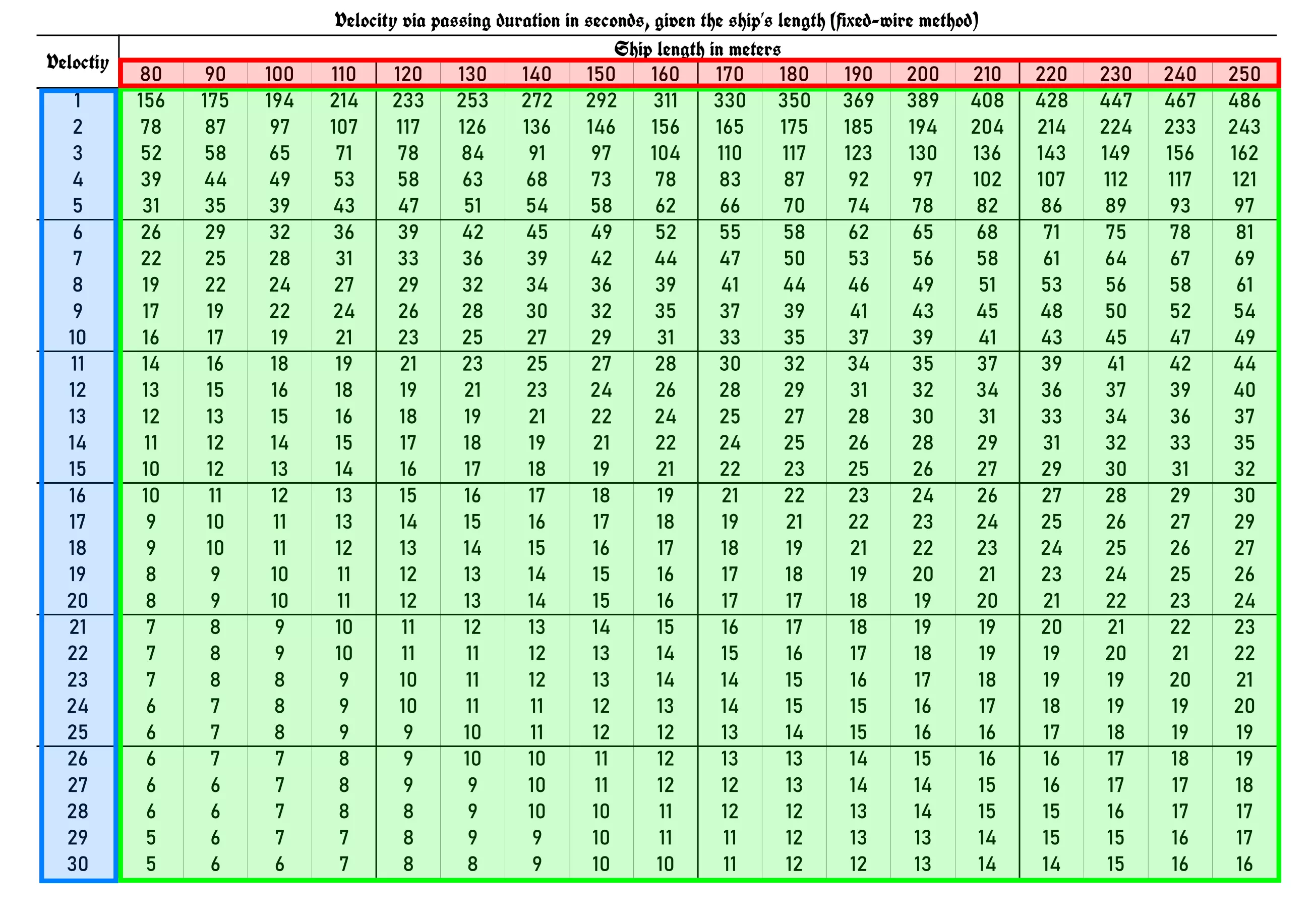
图2:前向方位角情况下固定瞄准线法的表格。 该表格包含三个区域: - 最顶行(红色):包含用于速度计算的目标长度,单位为米。 - 最左列(蓝色):单位为速度,此处可查看测量结果。 - 中间区域(绿色):目标从舰首到舰尾穿过瞄准线所需的时间。 对于前向方位角法,操作步骤如下: 1. 首先从识别手册中记录目标长度。 2. 保持恒定航向,等待目标舰首穿过0°方位标记,一旦穿过立即启动计时器。 3. 保持潜望镜稳定,让船只沿瞄准线通过,期间不改变航向。 4. 当舰尾穿过瞄准线时,停止计时器。我们以一艘长度为78.65米的NA-1型海岸巡逻艇为例。假设它通过自身长度的时间为24秒。 查看表格,在最上方一行找到目标长度或最接近的数值。此处应选择第一行的80米。 沿这一行向下查找与你测量时间最接近的数值。这里的时间介于22秒至26秒之间。 沿着该行向左查找,最左侧对应的数字即为目标速度(节)。在本例中,由于24秒恰好位于22秒和26秒的中间,因此测得的速度为6.5节。对于平行方位法,可能会出现以下情况: 你需要将自己定位,使目标在你开始计时时穿过任意方位(90°效果最佳),并在其船尾穿过同一方位时停止计时。 由于你与目标一同移动,此时长会比前方位法所预期的更长。 在我们的示例中,假设我们以3.2节的速度航行,并测得47秒。 再次在中间查找该时间。我们找到的最接近的匹配值是52秒,对应3节。由于52比47大10%,我们可知测得的速度比3节大10%,即3.3节。 现在将你自己的速度加上该值。得到3.3节 + 3.2节 = 6.5节。与之前的数值相同。你基本上可以跳过本节的其余部分,因为这两种特殊情况将占你遇到的99%的场景。如果你由于任何原因无法将自己置于有利位置,仍然可以使用通用方位法。这需要你使用正切函数(公式3)进行修正。幸运的是,我们为此准备了一个表格:
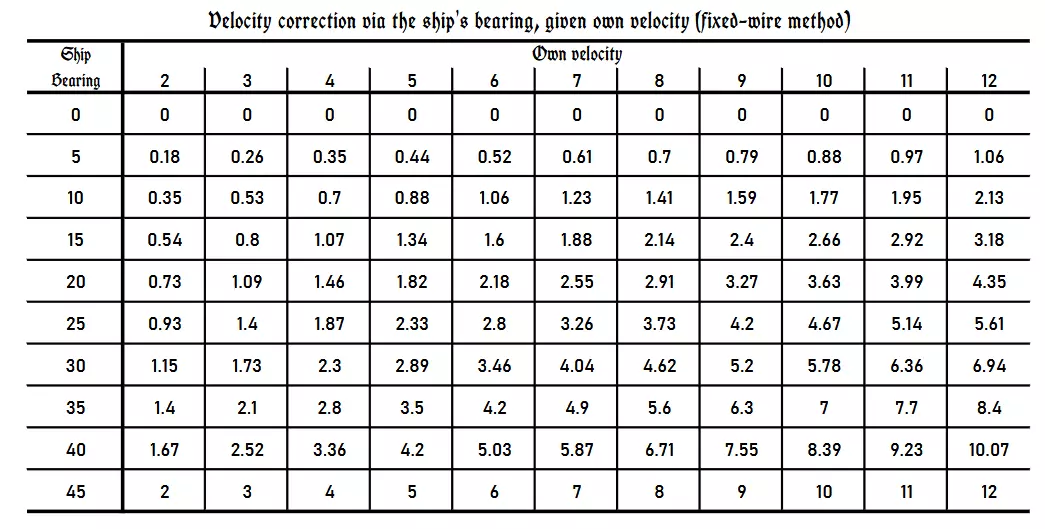
图3:使用通用方位法时的速度修正表。 该过程完全类似。我们在任意航线上,假设船只穿过我们的20°方位线,耗时29秒。将该数值当作已执行前方位法来使用。根据上方的表格(图2),由于29秒介于31秒和26秒之间,且更接近31秒,因此对应的速度约为5.3节。 现在查看表3。速度为3节时,20°方位需应用1.09节的修正值。由于我们的速度略快于3节,故将该数值提高至1.2节。 最终结果为5.3节 + 1.2节 = 6.5节。 结论 如你所见,所有方法都将得出相同结果。但是从前进方位法到平行方位法,再到通用方位法,逐步引入了更多误差来源: - 你的航向可能并非完全平行 - 对于较大时间测量值的插值可能不完全准确 - 修正表的粒度可能会降低插值的准确性 这意味着,当你需要精确结果时应使用前进方位法;当你本身就在平行航向上追踪,且不需要完美结果时,可使用平行方位法;而通用方位法的使用仅仅是因为你可以这么做,并且使用表格也挺有趣。 精确测量的通用技巧:距离越近,潜望镜晃动对精度的影响就越小。将此方法作为最后的手段,用于再次检查通过追踪目标获得的速度[en.wikipedia.org](你已经这么做了,对吧?)。 无论使用哪种方法,当目标的舷角(AOB)接近90°时启动计时器,总能提高精度。这是因为当舷角非90°时,你可能会意外地测量到目标表观长度的穿越时间,而非实际长度的穿越时间。 希望你能从本指南中学到一些东西。 本指南中使用的所有表格均可在游戏内通过“Das Book”获取! 我们从历史资料中汲取灵感,而DARKNESS'出色地设计了这本真实的手册,使其无缝融入用户界面。 快去看看吧!https://steamcommunity.com/sharedfiles/filedetails/?id=3419126557