换一换
换一换 



模拟器中四轴飞行器感觉飘的常见原因及一些减少或解决该问题的方法。 四轴飞行器感觉飘的原因: 四轴飞行器感觉飘是许多新手(包括我自己)可能遇到的常见问题。原因有以下几点: 【缺乏真实四轴飞行经验】,因此很难与模拟情况进行比较。 【电脑无法处理过高的图形设置】,导致微卡顿,从而产生飘的感觉。 【鱼眼/镜头效果可能会加剧飘的感觉】,尝试将其调至最低或关闭。 【在没有参考物体的情况下,难以判断比例、大小和距离】:如果你飞得太高并收油门,会开始下落,这需要一些时间,但由于没有物体来判断下落速度,会感觉像是在漂浮甚至悬浮。上升时也是如此。试着靠近物体飞行。尝试悬停在离树、灯杆或房屋非常近的地方,然后减小油门,这样在下落时你就能看清它。感觉轻飘飘的吗?试着在建筑物内部飞行。感觉轻飘飘的吗? 某些四轴飞行器相对轻巧且动力强劲,因此它们很容易获得高度和速度,尤其是在没有精细油门控制和管理的情况下。所以竞速四轴飞行器的预设通常可能会给人这种轻飘飘的感觉。另外不要忘记动态怠速:当你减小油门时,电机不会完全停止,只有在你解除武装时才会停止。 如果你更改了默认物理设置,也可能会增加轻飘飘的感觉。 很多时候,“轻飘飘”只是一种主观感受。我认为视场角、屏幕分辨率、相机角度和发动机声音等因素都可能产生影响。同时别忘了,这只是一个模拟,并不完美。你在模拟器中飞行的时间越长,就会越熟悉飞行的感觉,四轴飞行器也会显得不那么飘。一个模拟器比另一个更飘?你在某个模拟器中没有飘动感,而在另一个中有,原因可能是你在其中一个模拟器上花费了更多时间,对其物理特性更熟悉。此外,你在该模拟器中的图形设置可能提供了更好的性能,总体对硬件要求更低,所以试着降低“飘的模拟器”的图形设置,以获得至少稳定的75帧每秒。此外,你的“不飘”模拟四轴模型可能与其他模拟器中感觉飘的模型有很大不同,不同的地图以及你在其中的飞行方式也可能是影响因素。尝试设置相同的相机角度、屏幕分辨率、视野(FOV),甚至操控速率。在两个模拟器中尝试相同的飞行条件,例如在大小相近的建筑物内飞行,尝试绕树盘旋,围绕相似物体做一些简单的半滚倒转和横滚动作,然后进行比较。顺便说一下,当我切换模拟器时,即使没有感觉到飘,也能感受到差异,需要一些时间来适应。 如何解决 我的第一个建议是更频繁地飞行,并尝试近距离飞行,而不仅仅是在空中悬停。你飞行的次数越多,就会越熟悉模拟物理系统,那种飘忽的感觉过一段时间就会消失。 如果可能的话,尝试使用不同的更重或动力较弱的四轴飞行器。可以通过调整螺旋桨尺寸、电池、电机KV值(如果有这些选项的话)来降低四轴飞行器的动力。 另外,可以尝试稍微增加重力和质量,如果有相关设置,也可以调整空气摩擦力和阻力。 你的油门可能有点敏感。如果可以的话,尝试使用【曲线调整】和/或【油门限制】。享受飞行吧。
为什么这么飘?

2026-02-19 16:00:18

导读
本文介绍了模拟器中四轴飞行器感觉飘的常见原因,包括缺乏飞行经验、电脑卡顿、镜头效果、无参考物体、飞行器特性、设置更改等主观和客观因素,还给出了多飞行、换机型、调参数等解决方法,帮助四轴飞行器模拟器玩家解决飘的问题。

评论
共0条评论

下载实验分支,同时保留公开分支 - 适用于Windows系统
使用SteamCMD下载《Liftoff》的实验分支,同时保留公共分支。 前言 参与测试可能会很无聊,因为多人游戏大厅里没有多少玩家,而且你也无法参加锦标赛。通…
2026-02-20 16:000赞 · 0评论
使用Turnigy Evolution遥控器玩《升空》
如何设置你的Turnigy Evolution飞行控制器与《Liftoff》的快速指南 简介 这是一份关于如何在《Liftoff》中设置Turnigy Evol…
2026-02-20 13:000赞 · 0评论
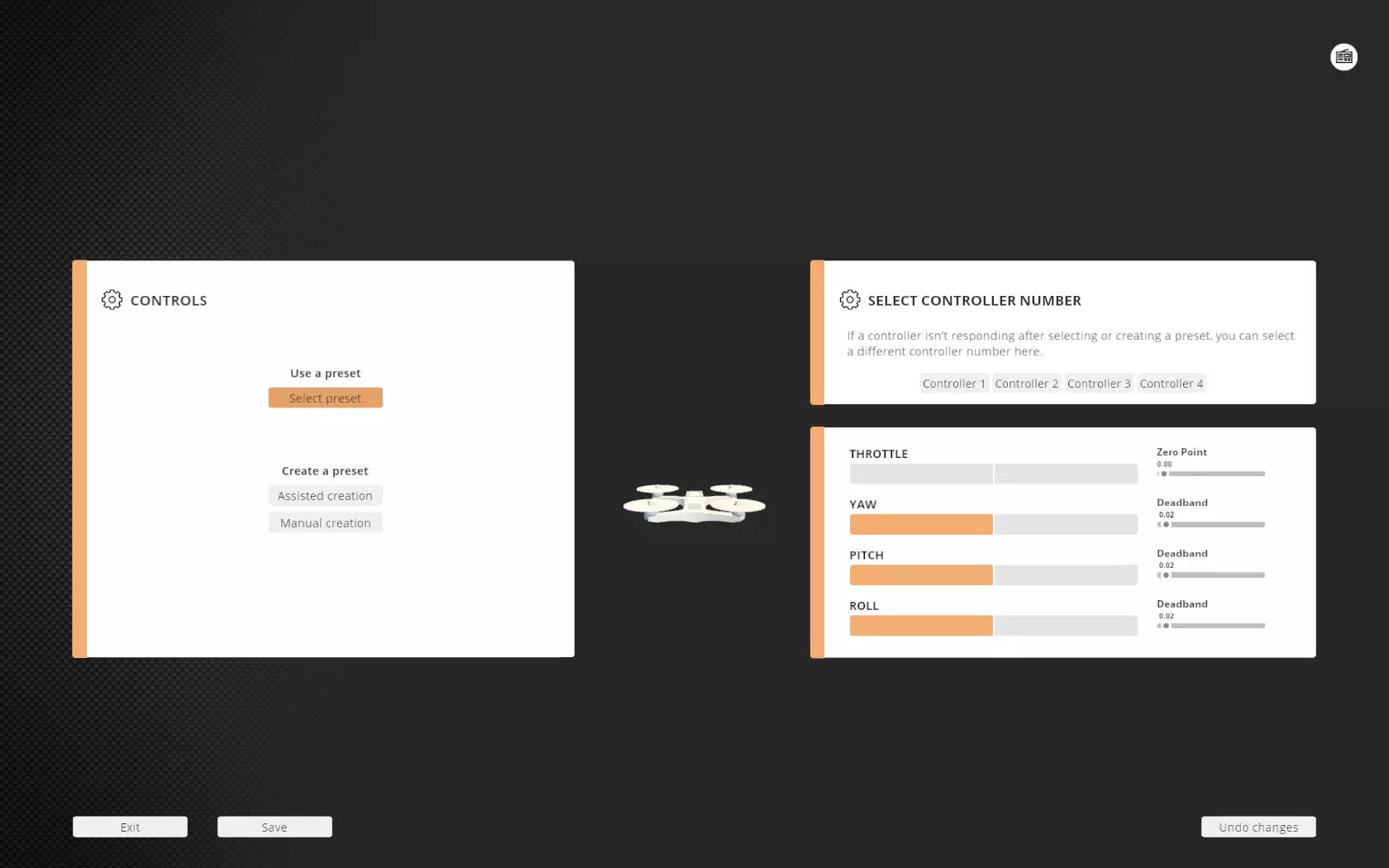
如何连接大疆RC-N1遥控器?
本指南将逐步介绍如何将最受欢迎的遥控器DJI RC-N1(用于DJI Mini 2、Mini 3、Air 2、Air 2S等无人机)连接到电脑。你将能够在像《L…
2026-02-20 13:000赞 · 0评论

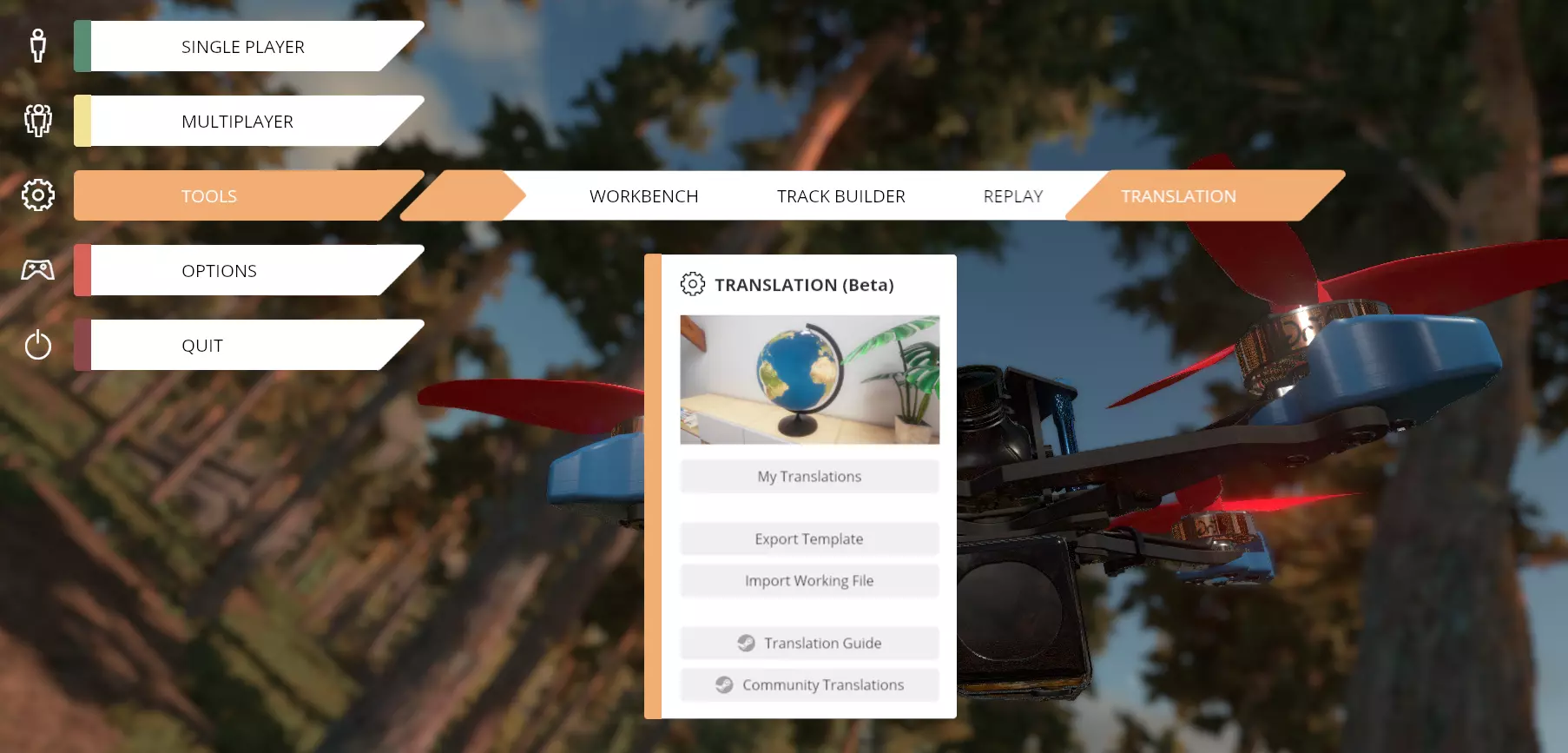
官方翻译工具指南
Liftoff翻译工具官方指南 简介 我们正在推出Liftoff翻译工具的测试版。现在你可以创建自己的游戏翻译了!
2026-02-20 10:000赞 · 0评论
复活节彩蛋寻找
Straw Bale地图上彩蛋的位置 彩蛋1/6 第一个彩蛋位于谷仓内,从门口飞进去很容易就能看到。
2026-02-20 07:000赞 · 0评论

《Liftoff》全成就指南
这是一份帮助你获取这款精彩FPV模拟器所有成就的指南! 简介 已更新至1.5.8版本(包含新的永冻地图)- 35/35个成就 本指南并非教你如何飞行,而是分享一…
2026-02-20 04:000赞 · 0评论

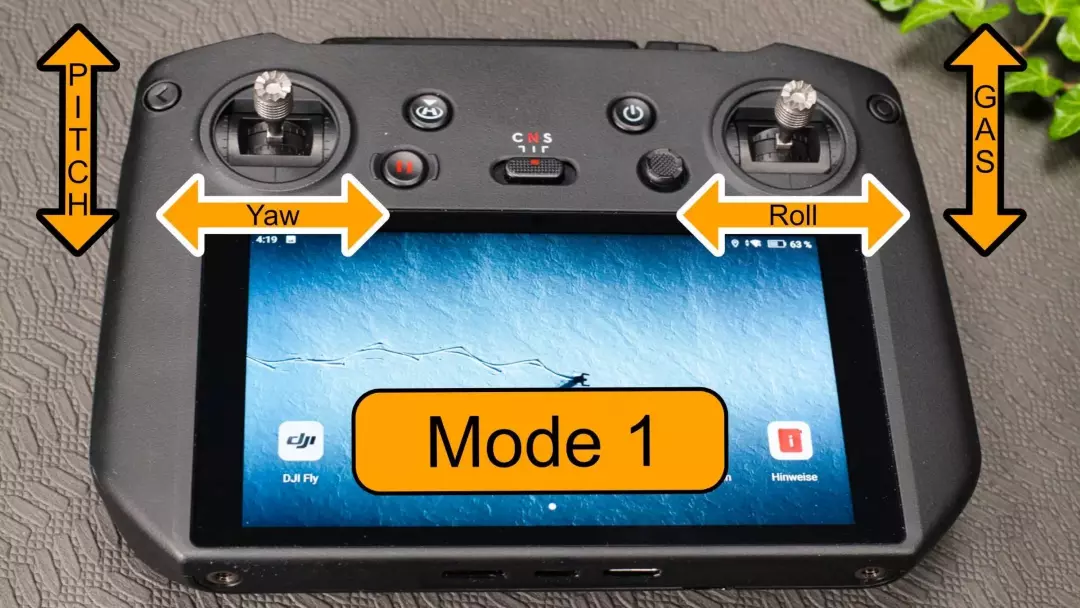
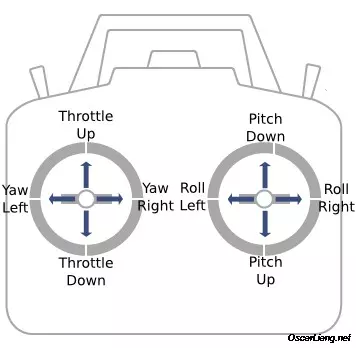
控制模式
在本指南中,我将介绍无人机的不同控制类型。 具体需要控制哪些方面呢? 对于有过无人机飞行经验的人来说,无人机的基本飞行功能基于四个动作是理所当然的。这些动作被分…
2026-02-20 04:000赞 · 0评论
彩蛋搜寻
如何达成【Easter Egg Hunting】成就 彩蛋位置: 1. 在巴黎无人机节关卡中开始自由飞行 2. 根据以下图片开始寻找彩蛋 I/VI 在隧道入口处
2026-02-20 01:000赞 · 0评论

《Liftoff》成就指南
《Liftoff》成就获取指南 已更新包含新成就。 希望你能喜欢! 简介 大家好!《Liftoff》是一款第一人称视角(FPV)无人机模拟器,大多数人用它来磨练…
2026-02-19 22:000赞 · 0评论
《Liftoff》玩法(版本:0.2)
《Liftoff》游玩指南(虽尚未完成,但已具备基础内容,故予以公开) 本指南适用于希望游玩包括《Liftoff》在内的FPV无人机模拟器,以及进行VRChat…
2026-02-19 22:004赞 · 1评论

暂无更多