换一换
换一换 





在本指南中,我将介绍无人机的不同控制类型。 具体需要控制哪些方面呢? 对于有过无人机飞行经验的人来说,无人机的基本飞行功能基于四个动作是理所当然的。这些动作被分配到飞行员手中遥控器的四个独立通道,通常可以通过两个操纵杆进行控制。在航模领域,这四种基本功能传统上为: 油门(转速) 升降舵(“俯仰”或“Pitch”) 副翼(“横滚”或“Roll”) 方向舵(“偏航”或“Yaw”) 将这些功能应用到多旋翼无人机(即旋翼飞行器)上时,这四种操作分别称为: 下降/上升 前进/后退 横滚(向左或向右) 旋转(绕垂直轴,也称为竖轴) 其他功能,如切换飞行模式或触发相机,通过其他通道实现,但这些功能并非无人机飞行的核心必需功能。 为什么会有不同的摇杆模式? 既然控制无人机需要四种基本功能,那么为什么还需要不同的摇杆模式呢?很简单:经典手柄或遥控器的两个操纵杆(摇杆)最初仅提供四个通道。各个功能如何具体分配到操纵杆上,目前尚未明确。 摇杆模式指的就是将功能组合具体分配到特定操纵杆上的方式。理论上,将四个控制功能分配到四个通道上的组合当然不止四种。 但实际上,有四种摇杆模式得到了普及,简称为模式1、模式2、模式3和模式4。 各摇杆模式概述 摇杆模式1:在模式1中,油门位于右操纵杆的垂直轴上。在此模式中,横滚操作由右侧摇杆的水平方向控制。
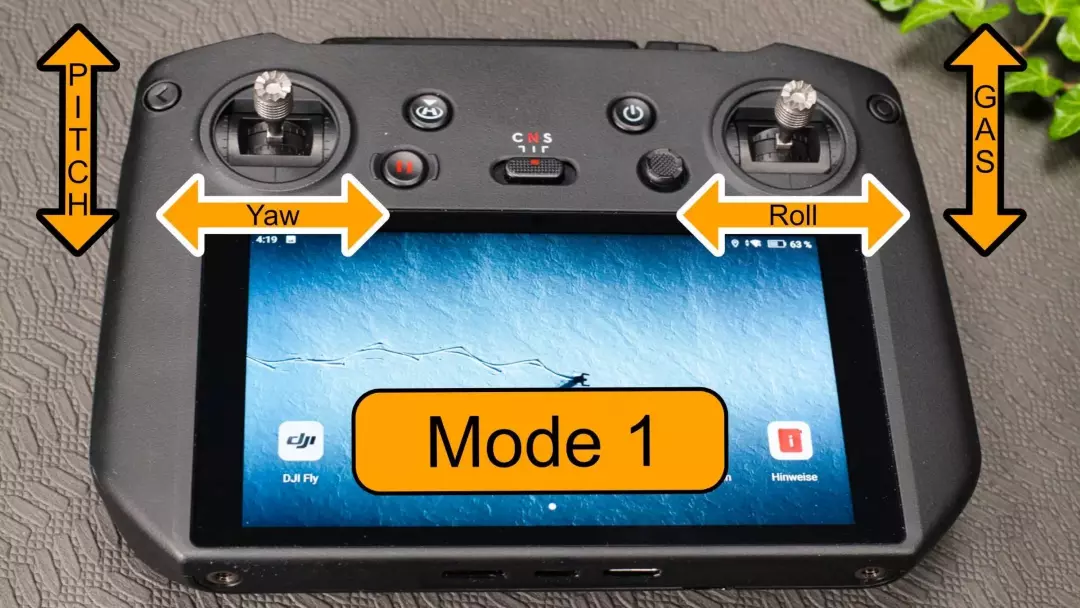
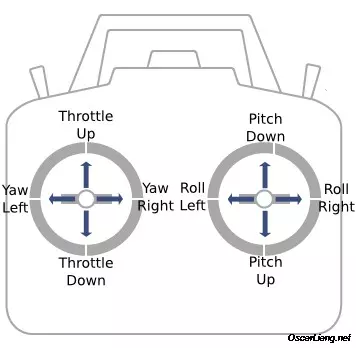
在左侧摇杆的垂直轴上是俯仰舵(Nick),水平轴上是方向舵(Yaw)。 摇杆模式2(最常见) 最广泛使用的配置可能是模式2。几乎所有当前市售的无人机型号都预先设置了这种摇杆模式。模式2最初主要在美国广泛使用,但在遥控模型行业的许多领域已成为事实上的标准。 在模式2中,油门位于左侧摇杆的垂直轴上。方向舵(Yaw)位于左侧摇杆的水平轴上。相应地,俯仰轴位于右侧摇杆的垂直轴上,横滚轴位于右侧摇杆的水平轴上。
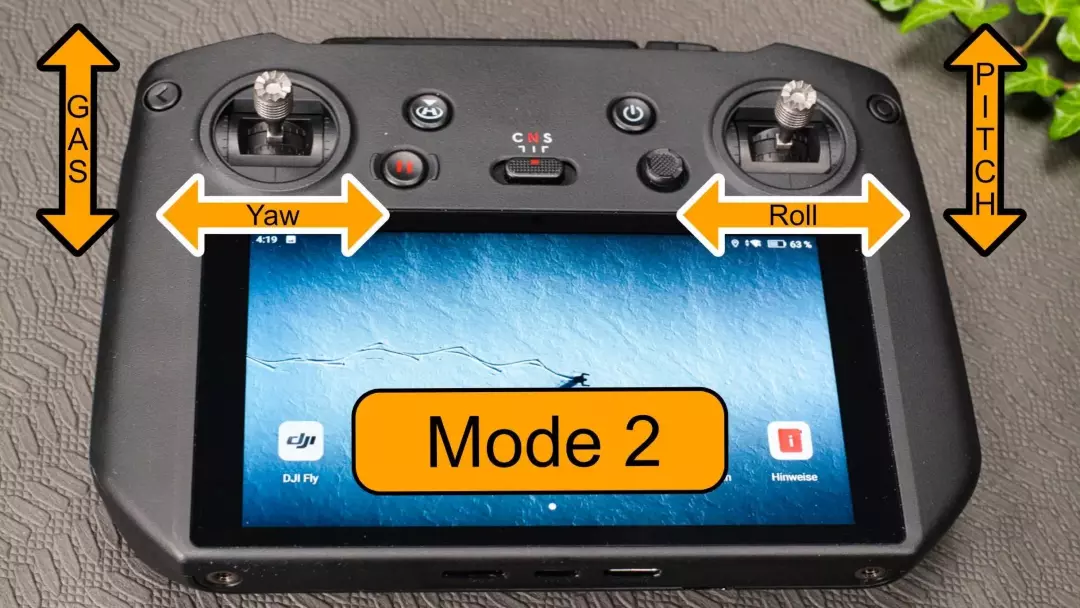
顺便一提,模式2也是许多主机和PC游戏在涉及游戏中飞机或直升机操控时所采用的模式。 摇杆模式3(反转模式):模式3实际上是与模式2完全镜像的一种配置。这意味着油门摇杆从左侧移至右侧,并且两个水平轴也会互换。
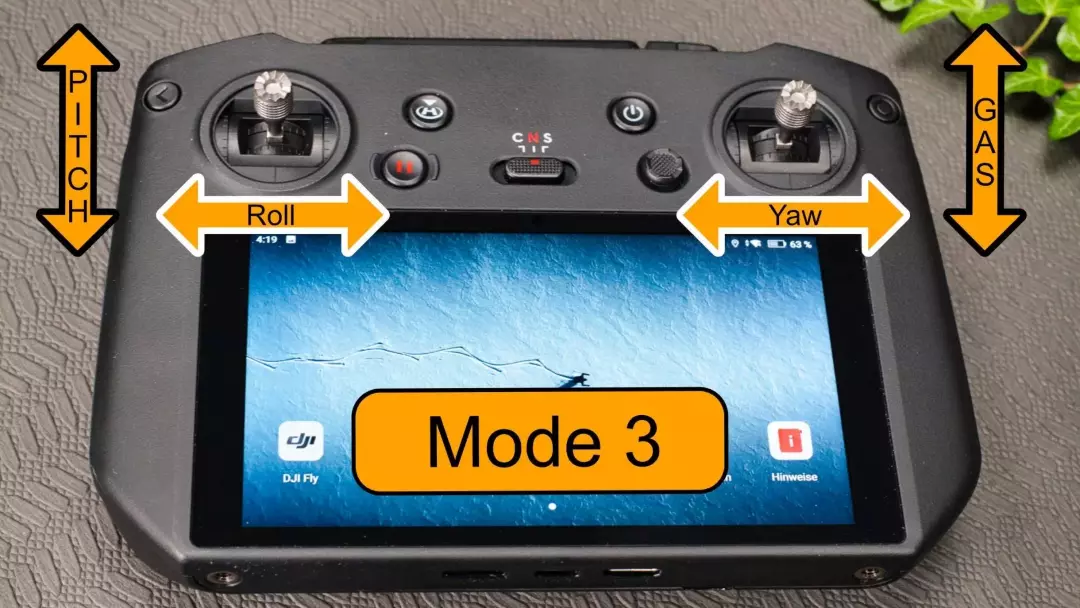
这意味着横滚轴(Roll)位于左侧,而偏航轴(Yaw)移至右侧。 摇杆模式4(反转模式#2,我个人的最爱)基本上与模式4相同。只是这里的基础设置对应模式1。不过,轴的交换遵循相同的逻辑。
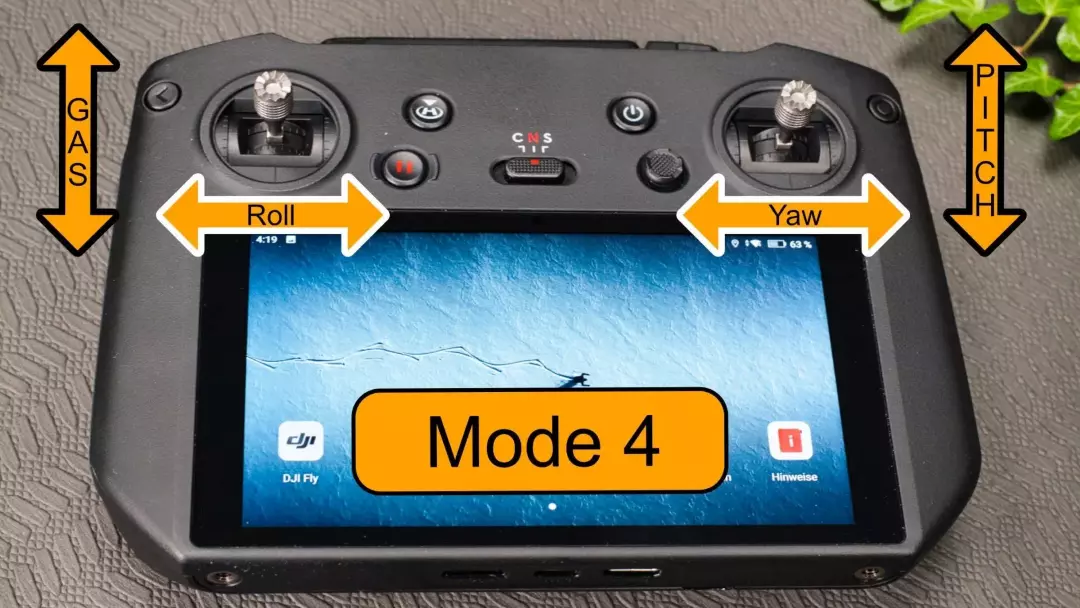
具体来说,在模式4中,油门杆(Gas-Stick)位于左侧垂直摇杆。横滚通道(Roll-Kanal)也移至左侧。俯仰(垂直方向)和偏航(水平方向)则相应地位于右侧摇杆。 摇杆模式5(个性化专家模式) 实际上,普遍认可的只有上述四种摇杆模式,它们的通道分配相对一致,分别被称为模式1至模式4。有时在某些配置或说明中会提到模式5。这指的是一种反映不同通道组合的摇杆模式,其组合方式与模式1至模式4不相符。 因此,模式5本质上是飞行员自行设计的个性化摇杆按键配置。应该选择哪种摇杆模式? 要回答这个问题,总体来说有点困难。 可以参考已有的经验,比如来自视频游戏行业和直升机操控的经验。 试着多尝试一下,看看哪种模式最适合自己。 但是要注意! 你们只需要清楚一点:一旦习惯了某种摇杆模式,之后就很难再“改学”其他模式了。遗憾的是,人类的大脑通常都非常固执。