换一换
换一换 





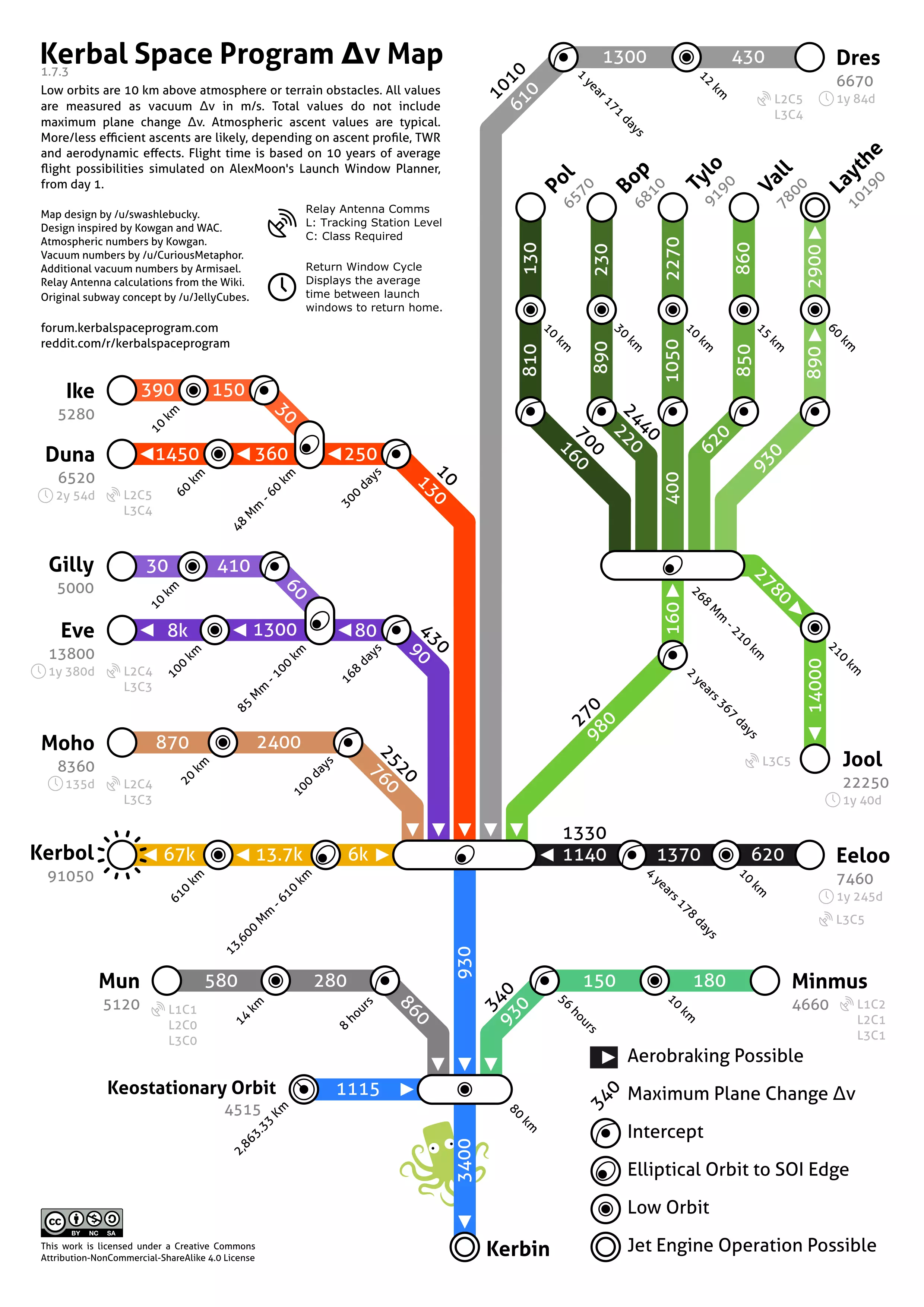
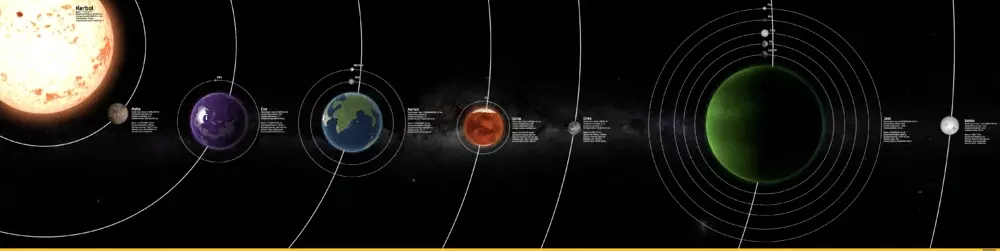
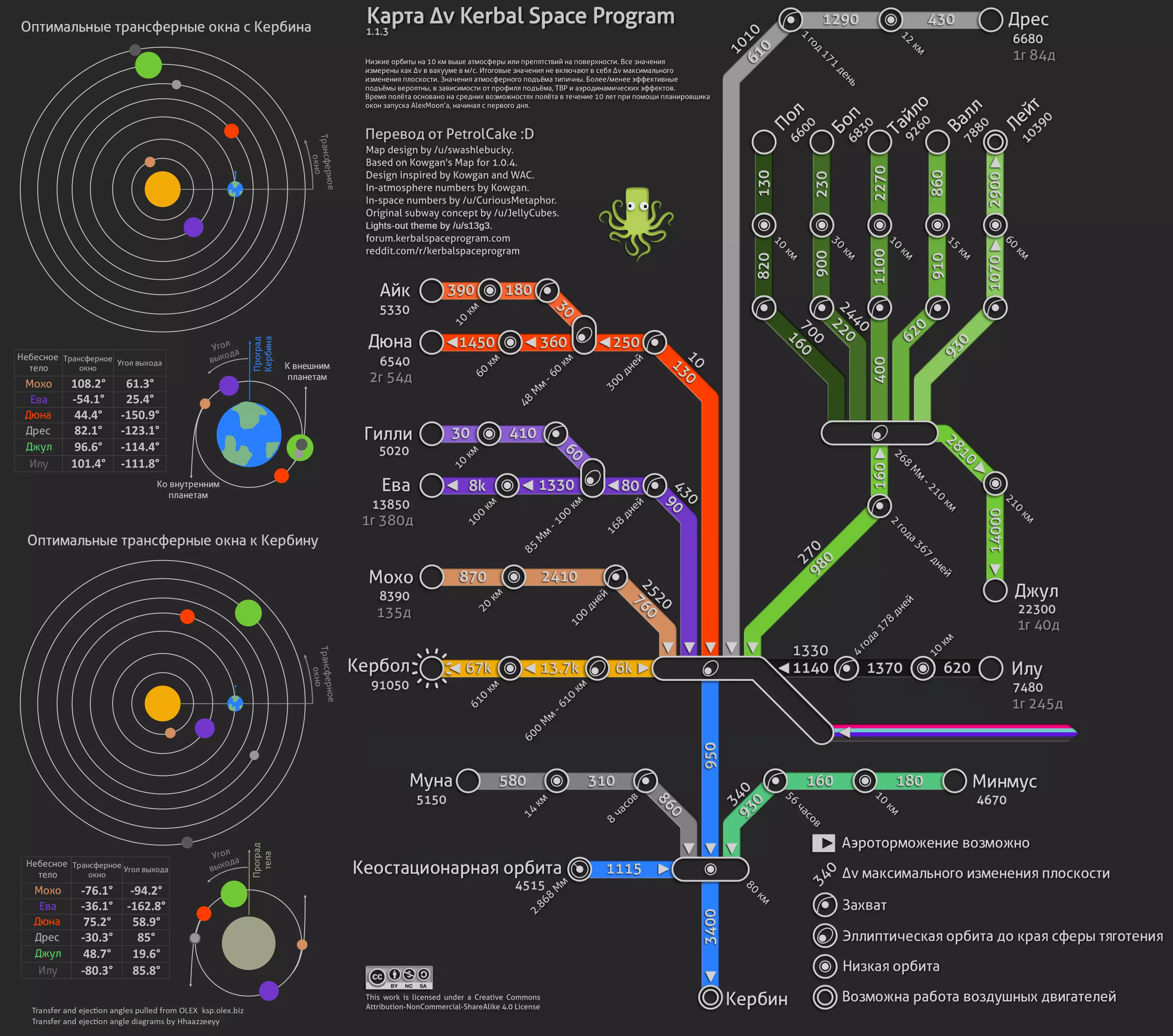
不知为何,我翻译的Δv地图与往返Kerbin的转移窗口地图合并在了一起。 如何使用? Δv地图 太空中的所有机动都通过一个动作完成——改变轨道。在这张地图上,每条线都代表一个这样的改变,也称为航向修正。同时,线上标注了执行该修正所需的Δv值。例如,要从坎巴拉低轨道进入前往 Mun的轨道,需要将速度提升至860米/秒,并且事先将航天器的头部指向正确方向。若要了解多个机动所需的Δv(德尔塔-v),需从起点到终点画一条线,并将线上显示的速度值相加。假设要从航天中心到达沙丘的低轨道,需要3400(Kerbin低轨道)+950(恒星椭圆轨道)+130(进入前往沙丘的轨道)+250(减速并进入沙丘椭圆轨道)+360(轨道调整)。总计约5000米每秒。返回的路径遵循完全相同的模式,但有一个细节——通常返回Kerbin时会使用降落伞着陆(这是最简单的方法),因此可以省去克服Kerbin引力所需的3400Δv。从Duna飞往Kerbin仅需1600米/秒的速度增量。作为地图路径上的额外信息,会显示轨道高度(若轨道非圆形,则会显示近地点和远地点)或预计飞行时间。转移窗口地图 使用转移窗口时操作很简单,如果需要飞往环绕Kerbin运行的行星,只需等待该行星与Kerbin的相对位置符合上图所示即可。需要注意的是,Kerbin的朝向也应与图片一致,即从顶部视角看,Kerbin的运行方向应朝上。下方是包含转移窗口角度具体数值的表格以及示意图,其中最重要的是“指向外行星”(迪恩、德雷斯、朱尔、伊卢)和“指向内行星”(伊娃、莫霍)的向量。在规划与行星会合的机动时,需等待行星运行至合适位置,然后将机动起点设定在目标行星所在位置,且机动的最终向量应至少大致与“指向目标行星”的向量相符。外部/内部行星。 如果要返回Kerbin,操作类似,此时我们需要关注下方的地图和示意图。需要在您想要返回的行星图标位置进行机动(当然,要等待该行星相对于Kerbin处于合适位置,并将机动向量与最近的逃逸向量对齐)。 Δv地图

传送窗口地图

合并地图
飞行顺利!