



 换一换
换一换 



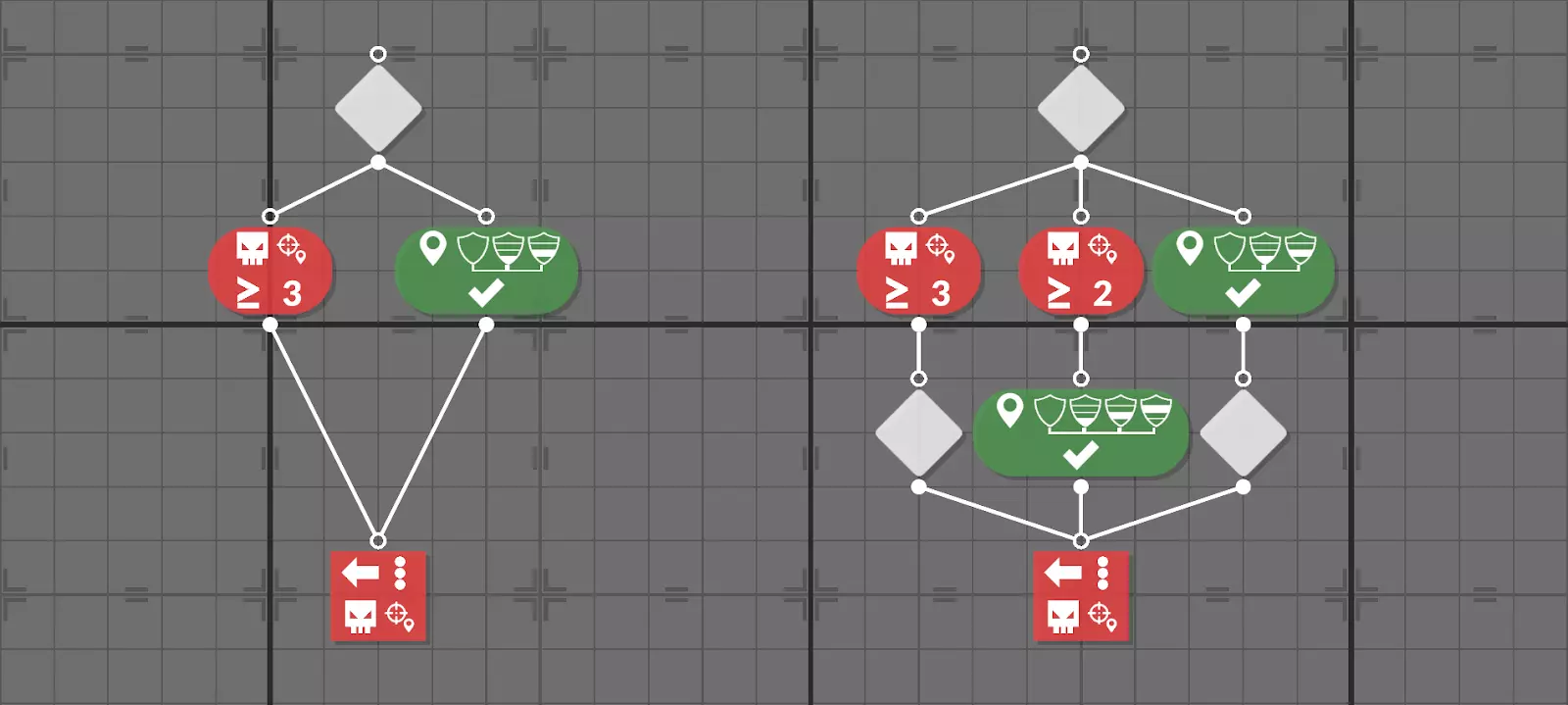
### 关于我的AI运作方式的指南 #### 简介 本指南将介绍我的AI如何运作。游戏模式为淘汰模式,队伍配置为4名突击兵、2名狙击手和2名霰弹枪兵。 本指南不会十分精确,而是旨在提供思路,希望能启发大家开发自己的想法和版本。 任何时候我使用“最佳”“必要”或“最好”等词汇,均是基于我的个人观点,而非客观角度。 欢迎提出任何问题和想法。 #### 护盾压制 护盾压制是任何突击兵的关键部分,其作用是阻止敌方护盾充能。基本原理是设定一个间隔时间,在这段时间内,你需要等待,直到攻击护盾值较低的敌人。何时执行此操作 最佳的操作方式是让敌人的护盾值达到一个临界点,即任何攻击都会使其撤退。当你攻击时它撤退,然后你停止攻击,它会前进或发起攻击,你等待几帧后再次开火,若它再次撤退,有望对其护盾造成伤害,从而阻止其护盾充能,如此循环。 因此,问题在于判断敌人何时撤退,以及你希望花多长时间将其护盾值控制在该临界点。 如何执行此操作 首先,你需要设定一个期望的护盾值触发点,当任何敌人达到该值时,以某种方式标记该敌人,例如使用单个标记并配合计数器或类似格雷码的方式。一段时间后,解除对该敌方机器人的标记。然后你要设置成,当敌方机器人被标记时,你的所有机器人都不攻击它,而一旦标记消失,至少要有一个突击机器人立即攻击它。 推进机枪机器人 机枪机器人在突击时可能会非常棘手。用突击机器人攻击它以使其移动是一项艰巨的任务,而霰弹枪机器人必须进入中距离,并且在 dps 方面处于极大的劣势。 让机枪机器人移动的最佳方法是使用你的狙击机器人。 何时行动我是这样考虑的:机枪机器人在什么时候会成为问题?那就是我希望它移动的时候。这里的“问题”指的是“下一个障碍”。对我来说,有两个判断标准。要么是当它是离你最近的 n 个敌人之一时,要么是当你的其他机器人已经开始向它开火时。 对于第一个标准,它要么是最前面的敌人,要么是最前面的敌人之一。在这种情况下,让机器人靠近并攻击其他敌人,很多时候会导致机枪(MG)对你的机器人造成伤害,其伤害频率略高于你的突击机器人。因此,必须移动机枪。 第二点,假设你的其他机器人有合适的目标选择方式,已经将机枪选为下一个推进机器人的良好目标。你的狙击手也应该考虑这一点。 操作方法:一旦狙击手开始向机枪射击,我会继续攻击该目标,不进行更换或推进。我希望能尽快让机枪移动起来。 推进的第二部分是确保机枪一旦开始移动就持续移动。这可以在狙击手射程内时由其完成,但之后很大程度上要依靠突击机器人。继续针对机枪机器人采取行动,可以采用“返回即射击”机制,或者持续攻击而不管它上次被攻击的时间。机枪机器人移动缓慢,将其逼退至远处对我方队伍是重大优势。我方狙击手花费了大量时间才打穿敌方护盾,在所有友军都脱离射程前,不要让护盾重新恢复。 狙击手计时 我的人工智能中一个重要部分是狙击手计时。它可以测量与敌方狙击手的距离以及射击时间,最棒的是这只需要4个个人计数器!不过我认为,在不过多牺牲精度的情况下,制作一个2计数器版本也是可行的。 何时使用:始终使用。 为何使用:对我而言,使用它的主要原因是让我的机器人能在战斗中停留尽可能长的时间。在使用狙击时钟之前,我的机器人一旦受到狙击手攻击且护盾已承受足够伤害,就会立即逃跑。但狙击手需要3秒时间才能开火,这意味着你常常会损失1-2秒的自身开火时间,而在这段时间里,你的机器人本有可能让敌方狙击手先行撤退。肯定有某种不错的数学方法能解释狙击时钟的这一特性。 第二个原因是推进控制。如果你没有优势,那么在一个不会让你在敌方狙击手开枪前就逃跑的距离停下,或许是个好主意。 操作方法:为每个狙击手设置两个计数器。一个用于测量你与狙击手之间的距离,另一个用于记录其射击的进度。你或敌方狙击手的任何非撤退移动都会缩短距离,而任何撤退移动则会增加距离。然后你需要将射击次数和距离计数器相加,并根据自己的偏好采取相应行动。我在对敌方狙击手使用相同的射击计数器时取得了很好的效果。虽然我在实践中没有过多尝试,但我认为在每个时间单位只标记最近的狙击手,并根据其行为进行调整可能也会奏效。尤其是因为大多数玩家不会在4v4的出生点设置中让狙击手一起生成。
各类文本

2026-03-20 16:00:39

导读
这是一篇AI游戏作战指南,介绍了4突击兵+2狙击手+2霰弹枪兵的淘汰模式队伍配置,重点讲解突击兵的护盾压制技巧、用狙击手推进机枪机器人的方法,以及狙击手计时机制,帮助玩家优化AI作战策略。

评论
共0条评论

欢迎来到机器人大擂台
新手入门指南 欢迎 你好, 欢迎来到青铜联赛。你可能觉得自己已经完成了教程,准备好开始冲分了。 但其实你还没准备好。 事实上,你会经历很多失败,但这没关系。这款…
2026-03-22 16:000赞 · 0评论

《角斗机器人》技巧与资源
本指南汇集了《角斗机器人》的视频、文章及相关资源。尽管已有许多优质资源,但我希望能帮助大家筛选重复内容,避开过时信息。获取最新信息的最佳渠道包括《角斗机器人》官…
2026-03-22 13:000赞 · 0评论

逃跑指南
本指南旨在提供一种简单且对新手友好的机器人逃跑控制方法,并创建一个易于扩展和修改的基础框架。 简介 本指南旨在提供一种简单且对新手友好的机器人逃跑控制方法,并创…
2026-03-22 13:000赞 · 0评论
基于计数器的人工智能
本指南中人工智能的核心在于通过判断机器人的团队优势和个体优势等标准,来决定何时推进以及何时不推进。 简介 本指南将展示一些基于反击的人工智能示例及其可能的实现方…
2026-03-22 10:000赞 · 0评论
专家级人工智能(1550分排位淘汰赛)
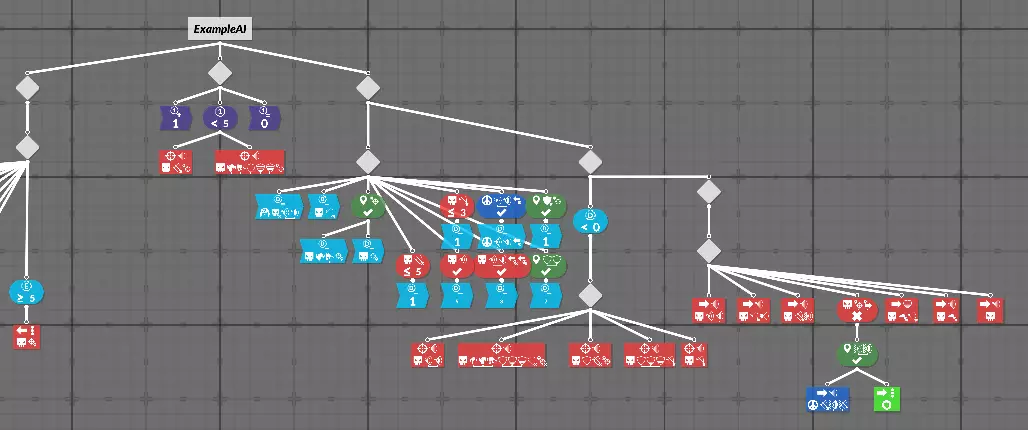
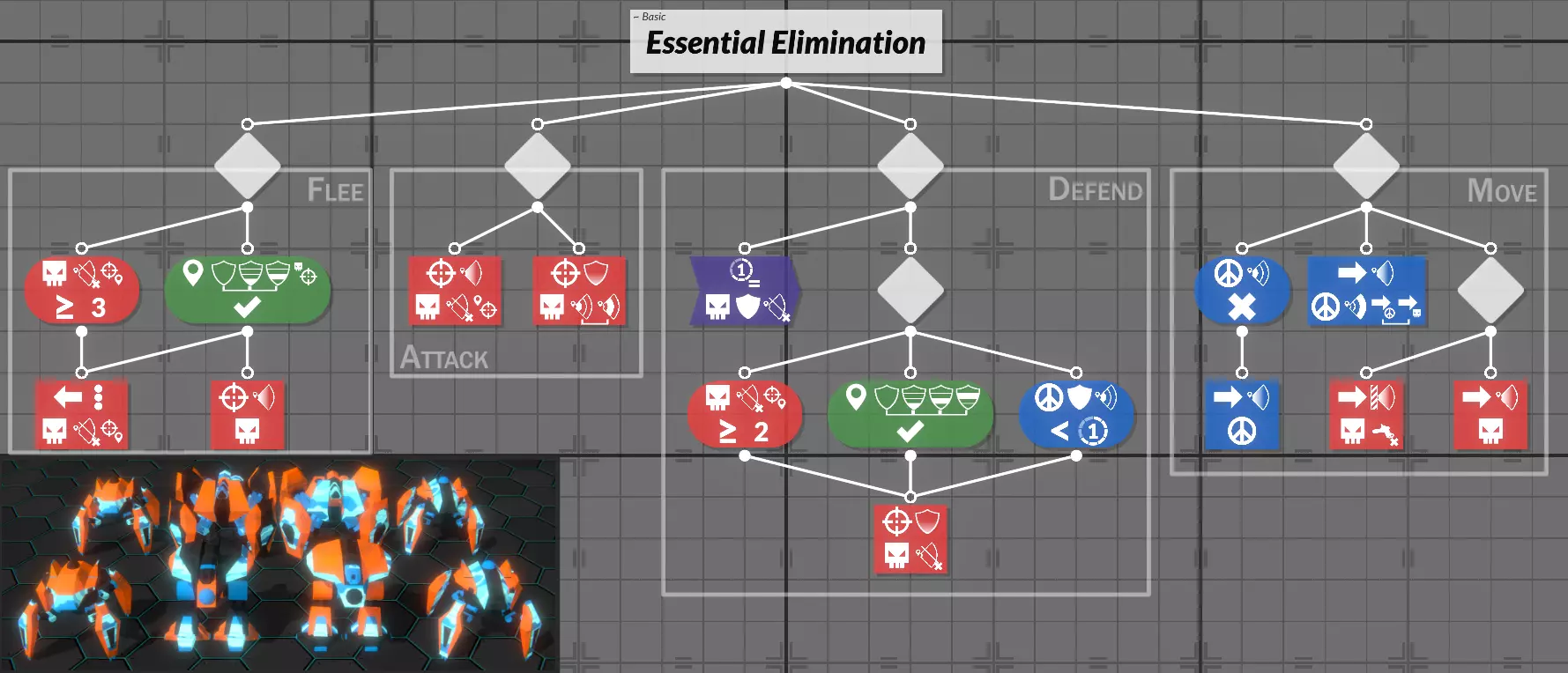
专家级人工智能示例,让你明白这其实比看起来简单。你也能成为大师。 基础消灭策略
2026-03-21 19:000赞 · 0评论
《蓝色小队》第四赛季说明
本指南汇集了黑水、佩奇以及蓝队其他成员在第四赛季期间的心得。主要面向已熟练掌握基础操作,并希望进一步提升游戏水平的中高级玩家。 资源收集 资源收集的维度 如果你…
2026-03-21 16:000赞 · 0评论

《机器人大战:AI竞技场》日语指南
《角斗机器人》基础玩法说明及补充内容 - 各机器人说明 - 队伍编成示例 - 基础AI流程 - 一些技巧 各机器人说明 游戏中有突击、霰弹枪、机枪、狙击手四种类…
2026-03-21 01:000赞 · 0评论
各类文本
### 关于我的AI运作方式的指南 #### 简介 本指南将介绍我的AI如何运作。游戏模式为淘汰模式,队伍配置为4名突击兵、2名狙击手和2名霰弹枪兵。 本指南不…
2026-03-20 16:000赞 · 0评论
暂无更多


