换一换
换一换 





本指南汇集了黑水、佩奇以及蓝队其他成员在第四赛季期间的心得。主要面向已熟练掌握基础操作,并希望进一步提升游戏水平的中高级玩家。 资源收集 资源收集的维度 如果你还没看过TTakeshi关于资源收集的视频,建议去观看一下。这是提升资源收集能力的绝佳入门内容。 TTakeshi在他的视频中定义了三种类型: N型:优先获取最近资源的策略 M型:开局时集中团队力量争夺中间资源 E型:专注于窃取敌方资源 自从我开始游玩以来,发现TTakeshi忽略了几个维度。 控制型与进攻型

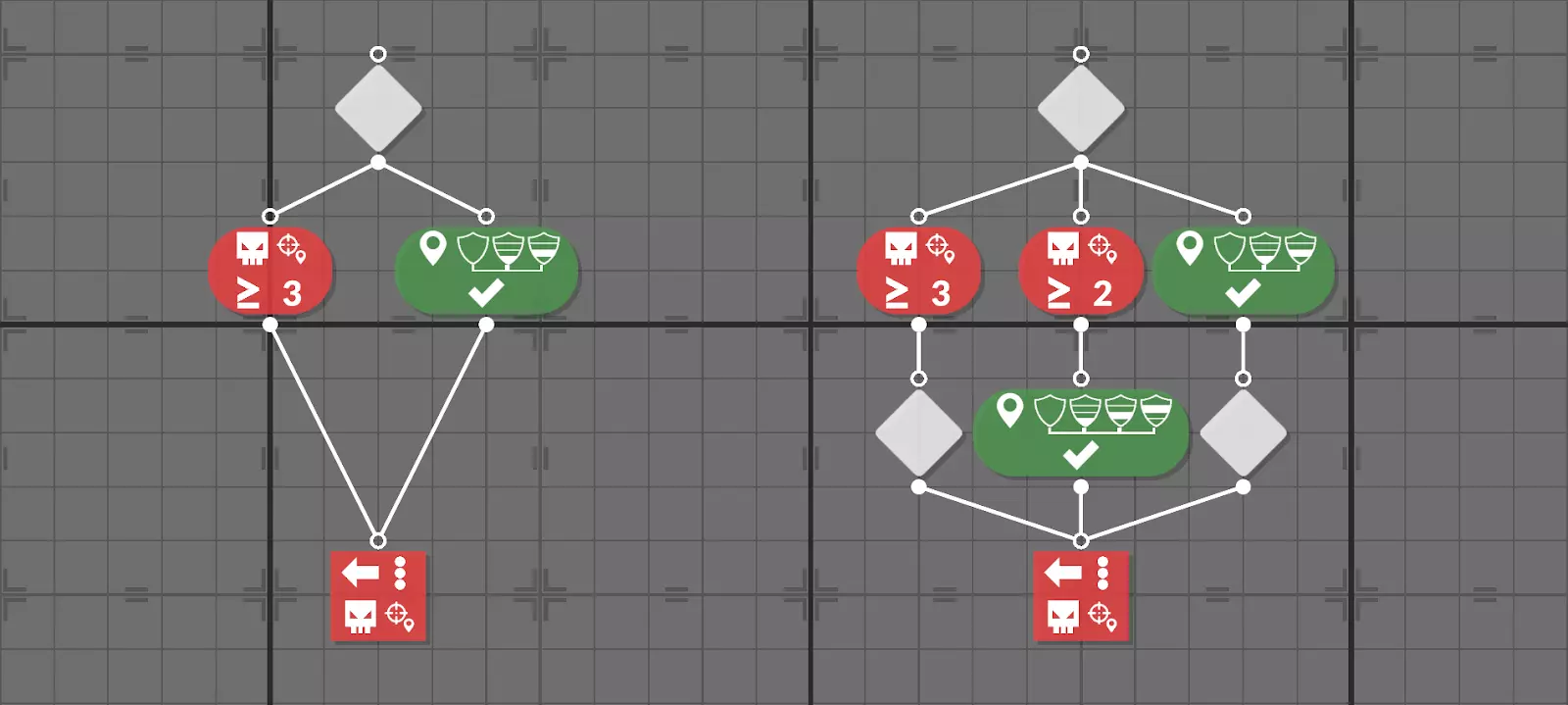
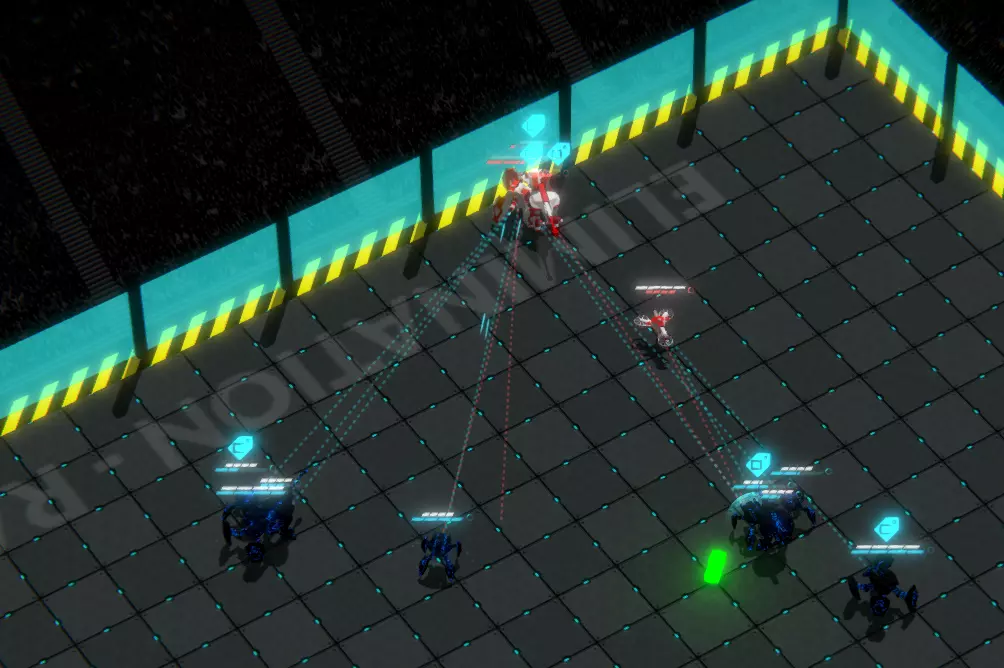
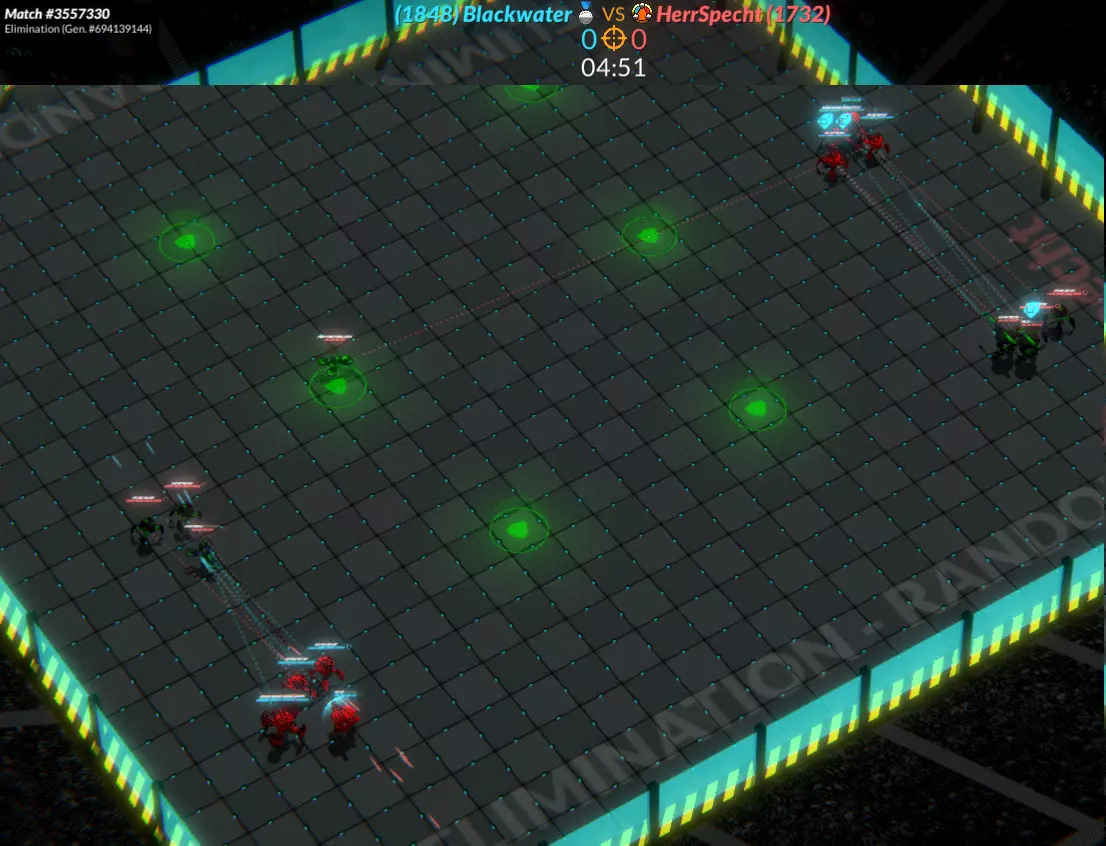
借鉴自《万智牌》中的玩法风格,我们将“控制型”玩家定义为:使用大部分机器人来压制和阻止敌人的玩家;而“快攻型”玩家则是指那些主要忽略对手,全力利用机器人进行得分的玩家。在这张图片中,右侧玩家采用的就是控制型策略——他们投入所有机器人,力求阻止对手得分。 值得注意的是,控制型玩家不一定打算通过获取半数资源来获胜!由于大量机器人用于拖慢对手节奏,而用于得分的机器人数量较少,这意味着许多比赛会以时间结束的方式告终!这意味着,当激进型玩家可能专注于选择获胜所需的资源时,控制型玩家则在考虑分数优势和剩余时间。 努力次数 我注意到,有些队伍主要协同合作去争夺一个难以获取且竞争激烈的资源,而另一些队伍则尝试进行多项努力。单一努力型队伍在那些必须获取关键资源否则就会输掉游戏的地图上会取得成功。M型通常是单一努力型队伍。多努力型队伍在拥有侧翼友方基地的地图上表现尤其出色。如果敌人在其他地方忙碌,多努力型队伍就能轻松完成多次偷取。E型通常是多努力型队伍,但并非绝对。齐心协力偷取侧翼资源的队伍仍属于单一努力型队伍。如果你能识别出靠近敌方出生点的力场,那么这些力场对任何机器人来说都是极具价值的夺取目标,因为它们能阻止敌方的增援。 你需要尝试判断对手夺取的力场是有利还是不利。如果处于力场护盾保护下的对手并未占据优势位置,那么最好忽略他们,让对手的潜在得分机器人无法进入基地。相反,要集中攻击处于关键力场中的敌人,因为他们恢复护盾的成本是正常情况的三倍。 霰弹枪机器人凭借其速度和护盾,拥有独特的力场战术。建议用它们快速抢占敌人正在接近的力场,将力场作为撤退点,并使用霰弹枪在己方推进的机枪机器人前方抢占力场。 淘汰 策略:谨慎对抗激进在这张图片中,左侧玩家似乎通过多次尝试得分并牵制住对方队伍的单次行动而获得了优势。 清单 在这部分,我想列出你在【资源收集】时应该考虑的事项: 追击条件 在资源数量较多的地图中,如果还有大量资源剩余,追击敌人可能并非有效之举。战胜逃跑的敌人难度很大,而且你必须确保获胜,否则会浪费更多时间。 然而,一旦意识到敌人即将获胜,你就需要阻止他们。如果他们的分数足以取胜,就不要再试图获取安全资源,而是去阻止他们!如果你没有相关代码,考虑添加这部分内容。你可能需要计算类似这样的问题:“场上是否有足够的资源让我获胜?”或者“敌人携带的资源是否足够多,以至于他们如果带着所有资源得分就能获胜?”——这取决于你的计算方式以及对你来说最简便的方法。 限制追击行为:如果你距离足够远,而敌人距离基地足够近,那么追击他们可能完全是浪费时间。例如,如果一个携带资源的敌人距离基地很近(最多6秒即可得分),而你距离基地超出攻击范围(即使使用霰弹枪,至少也需要7.5秒才能到达),你可能会决定这个机器人不参与追击。在可能输掉游戏的情况下,你或许无论如何都需要冒险,但除此之外,显然不应该追击。收集型机器人策略对战斗的影响 E型战斗需要与M型战斗有所区别。对于M型战斗,你需要具有攻击性、不惜牺牲的机器人。这是因为你要让所有4个机器人都去争夺关键资源。 E型 在E型战斗中,你需要更谨慎的机器人。这是因为你可能在某个位置处于数量劣势,所以可以在另一个位置进行偷袭。由于战斗预计会在对手那边进行,即便是势均力敌的战斗交换对E型来说也是损失。 M型 M型的问题在于,长时间的战斗意味着在主要战斗进行时,对手正在得分。你需要让这场战斗迅速结束。理想的M型战斗是在第一场战斗之后,所有其他战斗都在友方区域进行。由于机器人前往友方区域的移动速度比对手更快,因此在机器人交换时,M型玩家会获胜。 机器人配置对资源收集玩法的影响 定义: •g - 霰弹枪 •A - 突击步枪 •n - 狙击步枪 •M - 机枪 我最近将配置从gAnM切换为gAMA,并且错误地认为只需保持所有战斗程序不变即可。适用于某一队伍的许多策略并不一定适用于另一队伍。以下是我的发现: gAAM或gAMAgAAM(霰弹枪、突击步枪、突击步枪、机枪)队伍感觉非常适合所有4名队员根据需要进行资源收集。对于E型玩家来说,两名突击步枪手的速度提升是个不错的补充。 在没有狙击步枪的情况下,该配置在战斗中明显感觉较弱,因此我一直在尝试改变战斗方式以更好地适配。更具生存能力,攻击性较低。 gAAn或gAnA 这是最快控制中间资源的最佳队伍。3个快速机器人赶到现场,再加上一个能从远处输出大量火力的狙击手,对于配备机枪的队伍来说,在争夺中难以取胜。机枪机器人到达中心的速度太慢,而且要到中等距离才能造成高额伤害,甚至需要移动更远的距离。 与gAAM阵型类似,gAAn阵型为多任务队伍提供了良好的对称性。 我认为在gAAn配置中,你要尝试在机枪机器人到达并主导战斗之前,不断将资源推回去。 gAnM 这是一个平衡良好的阵容,拥有多样化的工具组合。机器人指令顺序 Gilberreke指出,机器人指令顺序的一个非常重要的概念是,第一个机器人将接收第一条指令。如果你分配机器人去避开友军正在接近的资源,这一点至关重要。这意味着除第一个机器人外,所有其他机器人的选择都将受到限制。由于霰弹枪机器人可能需要优先选择,我认为将其放在首位是合理的。或者,让霰弹枪机器人处于中间位置也有道理,这样可以在开局时平均提高霰弹枪机器人距离关键资源较近的几率。 统治模式 战斗风格 在统治模式中,我们通过两种方式得分:将基地转化为友方基地,以及让机器人驻守(蹲守)在已占领的基地上。团队通常会专注于以下两种策略中的一种,形成两种主要风格: 进攻型团队 进攻型团队总是试图占领下一个基地,并将其置于守住已占领基地之上。它们有时会使用速度更快的机器人来实现这一目标,并推进到更近的距离。这种策略编码起来可能更简单,因为不需要判断是否拥有足够的基地。这类团队在基地数量较多的地图上尤为强大,在3个基地的地图上,如果快速占领中央基地对赢得比赛至关重要,它们也能发挥出色。但在基地数量为偶数的地图上,尤其是基地分布较分散时,这种策略可能会遇到困难。 效率型团队 效率型团队专注于最大限度地增加机器人在基地上的停留时间,并通过比对手更多地“蹲守”基地来赢得比赛。Herrspecht是这种玩法的绝佳范例,他们的队伍即便在比赛大部分时间里占据的基地数量较少,也常常能赢得比赛。该策略适合狙击机器人,它们能从远处提供最强火力支援,同时还能守住基地。实际上,这类队伍的机器人往往会有更多留守友方基地的指令,并且机器人可能会移动到友方基地进行支援。 力场使用 在统治模式中,力场有多种用途,最佳范例可以参考力场专家Defunct。一个明显能决定比赛胜负的操作是:让你的机枪机器人进入靠近基地的中央力场。一旦它们就位,其巨大的护盾和生命值会让对手很难 counter。
《角斗机器人》并没有为我们提供完备的信息。我们无法获得诸如射程或生命值等数据的确切数值。相反,我们必须对如何解读这些数据做出判断。此外,我们还得决定对敌人采取何种姿态。我们是要以造成最大伤害为目标,还是要尽量减少我方机器人受到的伤害? 激进型机器人将生命值视为一种资源。在势均力敌的对峙中,它能够胜出,因为当对手选择撤退时,它已准备好继续战斗。这意味着激进型机器人能在阵地和伤害两方面获得优势,因为它会对撤退的敌人造成伤害,并且在敌人撤退时向前推进。激进型机器人的弱点在于容易陷入陷阱并在战场中央被摧毁。 谨慎型机器人则将生命值视为一种安全保障。谨慎型机器人不会陷入在中场死亡的陷阱。相反,它们会利用安全移动的策略,逐步消耗对手冒险移动的优势,直至最终实现击杀。即便谨慎型机器人犯错,代价通常也并非致命。这类机器人的失败往往是被压制到墙边,或者因未能充分压制对手而打成平局。 深度战斗与浅层战斗:与进攻性相关的一个概念是战斗深度的选择。机器人可能会根据局部战局调整战斗姿态。浅层战斗指的是在距离边界附近活动,并试图利用该距离边界的优势。例如,如果你知道自己距离敌方狙击手的【出界范围】(OOR)正好一步之遥,并且正在计算其射击周期,你就可以自由操作:在精确的周期后退一步,然后再次上前继续行动。一旦你距离边界有几步之遥,就必须使用安全系数(谨慎行为)或承担风险(激进行为)。浅度战斗单位存在效率低下的风险,因为像机枪手和狙击手这类长射击周期的机器人,在追击撤退的敌人时,往往没有足够的追击深度来完成击杀。 深度战斗单位则试图让对手逃跑,然后要么获得大量阵地,要么造成大量伤害,因为逃跑的对手必须长途跋涉才能到达安全区域。拥有深度战斗策略的机器人需要良好的距离追踪能力,因为它们需要知道自己何时推进得太远。 推进型机器人与击杀型机器人 例如,如果一个敌人生命值耗尽正在逃跑,你是应该尽可能对其造成所有伤害(击杀型机器人),还是将枪口转向仍在战斗的对手(推进型机器人),以便开始将新的机器人击退。相反,推进型机器人策略可能会将枪口对准超出射程的目标,以阻止其重新推进,而击杀型机器人策略则会寻找新的造成伤害的机会。 编写出色的淘汰模式人工智能似乎关键在于决定你要打造的是击杀型机器人还是推进型机器人。推进型机器人会尽一切努力将对手逼到墙边,然后在他们绝望撤退时将其击杀。杀戮机器人会寻找机会对敌方机器人造成生命值伤害。两者显然都有用,但你的机器人会尝试优先选择其中一种。 如果你在打造杀戮机器人,距离追踪至关重要,因为你要寻找敌方在数学上无法逃到安全区域的机会,然后对该机器人造成尽可能多的伤害。距离追踪还有助于确保你没有让自己的某个机器人陷入无法逃脱的境地。 有多种方法,比如全部追击同一个敌人、靠近最近的盟友,或者移动到地图上的同一个点(例如中心)。这很有用,因为单独的狙击手特别容易受到霰弹枪猎手的攻击。正确的集火还能创造有利的战场位置,让敌人转向,使其更靠近墙壁。 集火可能在几个方面产生反效果。如果机器人移动距离过远,速度较慢的机器人可能会意外被甩在后面,遭遇迎面而来的敌人。集火还可能导致看似诱人却致命的情况,例如在中心聚集,但却陷入交叉火力的侧翼攻击。 霰弹枪策略
团队通常会分成两组4v4的阵容生成。玩家可以识别这种阵型并采取我所说的【策略】来应对。该玩家移动己方的一个机器人(通常是霰弹枪机器人),形成两个不对称的小组。一组为4v3,另一组为4v5。其思路是,第一组会以对手获胜告终,得分3(4个敌方机器人击败3个我方机器人)。第二组则会以采取策略的玩家获胜告终,得分4(5个我方机器人击败4个敌方机器人)。这样的结果会使采取策略的玩家在机器人数量上获得优势(5对4),他们很可能借此赢得比赛。 选择霰弹枪机器人来切换队伍是很有用的,因为它速度快。快速执行策略很重要,因为只有当机器人加入新队伍后,优势才能体现出来。战术策略并非总能成功。如果移动的机器人落单,或者在移动过程中陷入不利的交叉火力,战术策略就可能失败。如果4v3的战斗比4v5的战斗更快结束,战术策略也会失败。在这种情况下,敌方机器人数量将领先4个。如果他们在4v5的战斗获胜前增援,那将是灾难性的后果。 战术策略不一定非要3-5分兵。例如,也可以是2-6分兵。成功战术策略的原则是相同的:快速从一个战斗区域转移到另一个,并且让优势战斗区域的战斗与劣势战斗区域的战斗同时结束,或者提前结束。 距离追踪 玩家可以根据距离做出不同的战斗决策。以下是一些资深玩家的选择。基础距离追踪:不使用额外资源来做决策。可以通过假设造成的伤害等于可能移动的最大距离来做出保守判断。我不确定HerrSpecht在他最新的机器人中使用了什么方法,但他的视频描述了这种保守方法。 边缘距离追踪(1个私有标签):了解机器人是朝你而来还是离你而去可能会很有帮助。通过用一个标签追踪“上一回合该机器人是否处于远距离”,我们可以知道某个目标是刚好超出射程、刚好在中距离内等等。这个小小的改变能提供一个简单的优势,让机器人有把握后退或前进以改变射程阈值。中等分辨率距离追踪(3或4个私有标签) TTakeshi的推进视频中提到,使用计数器来判断机器人前进时应考虑的潜在威胁。仅使用计数器的问题在于,无法修正开始累积的误差类型。这可以通过在每个敌方机器人上使用3-4个二进制计数器标签,将范围细分为8或16个分区来解决。 距离追踪的其他工作方式与TTakeshi在其推进视频中描述的一致。我使用4个标签来追踪长距离。由于我的淘汰阵容中的所有机器人都进行远程战斗,因此我希望在此距离下获得最大分辨率。对于我的策略而言,在中等距离做出决策时不需要高精度。有些玩家会使用一个标签来追踪对手在上一回合是否处于远程位置。这使得它们能够细分中距离和超远距离(OOR),同时还能兼顾长距离(LR),但代价是长距离(LR)的精度会下降。 使用4个标签时面临的一个挑战是,机器人移动速度不同,因此这种精度不足以完美捕捉每一刻的移动。人们会采用不同策略来克服这一问题,通常是某种抽样方法的变体。 高精度距离追踪(每个机器人1个专用计数器和1个临时标签)。当然,我们可以通过设置一个每刻都更新的计数器来解决精度问题。这种方法在计数器消耗方面成本很高,但可以避免抽样带来的误差。