换一换
换一换 




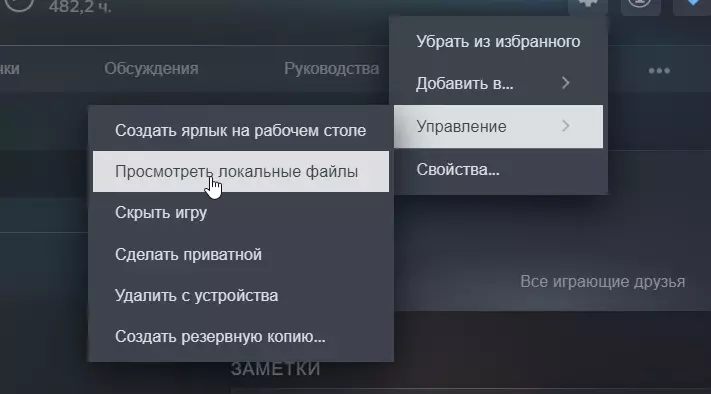
本指南包含所有关于MechJeb的俄语信息。部分参数和部分旁边有电视图标按钮,点击即可观看视频。 非常感谢BASE对本指南编写的帮助。 发现指南中的错误?请反馈。 安装 MechJeb可以从CurseForge官方网站下载。 MechJeb的安装方式与《坎巴拉太空计划》的其他任何模组相同,将其放入“GameData”文件夹中。你可以在Steam库中找到《坎巴拉太空计划》,右键点击游戏,选择“属性”,“本地文件”,“浏览本地文件”。在打开的文件夹中,选择GameData文件夹。然后打开下载的MechJeb压缩包,将压缩包中的文件夹移动到GameData中。 MechJeb是什么? MechJeb是一个强大的模组,能够自动执行游戏中的许多流程。MechJeb可以一键将火箭送入轨道,自动驾驶仪能够控制飞机航向、高度和速度,实现飞机在跑道上的自动着陆,火箭在指定地点自动着陆于任何卫星或行星,地面载具自动驾驶,按航向和已创建的航点行驶,控制自动稳定系统,智能加速时间。《坎巴拉太空计划》的机动规划器以及大量其他参数和功能,可简化游戏中的操控、交互和整体游戏流程。 如何启用MechJeb? MechJeb模块位于【定向与控制】选项卡中。无需将其安装到火箭上,只需在任意指令舱上启用MechJeb功能即可。 启用 - 已启用 禁用 - 已禁用 机库功能 默认情况下,机库中有四个MechJeb窗口可用。船只信息 - 关于船只的信息。 自定义窗口编辑器 - 窗口设置。 设置 - 通用设置。 Delta-V 统计 - 火箭及其级别的信息。 引用自 Dzheo:要在许多窗口中显示正确的值,需要按正确的顺序排列级别的启动顺序。弄清楚机库中级别的顺序后,您将在启动时节省大量时间和精力!飞机进近与自动着陆 - 着陆 飞机在跑道上的自动着陆。
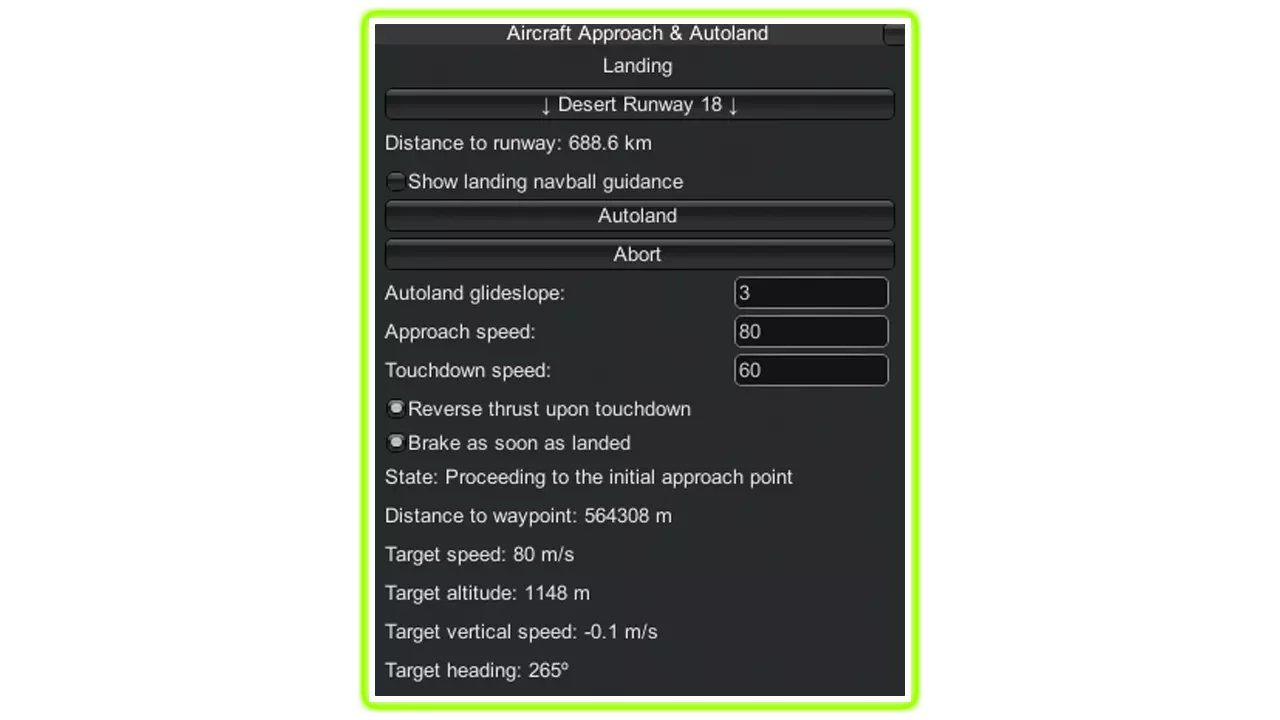
MechJeb 可以自动将飞机降落在三个机场中的任意一个。 【降落】- 选择机场以及进近方向。
沙漠跑道18 - 沙漠机场(18号方向) 沙漠跑道36 - 沙漠机场(36号方向) KSC跑道09 - 坎巴拉太空中心机场(09号方向) KSC跑道27 - 坎巴拉太空中心机场(27号方向) 岛屿跑道09 - 岛屿机场(09号方向) 岛屿跑道27 - 岛屿机场(27号方向)
自动着陆 - 激活自动驾驶。 中止 - 关闭自动驾驶。 自动着陆下滑道 - 下滑道或最佳着陆轨迹。 进近速度 - 执行着陆进近机动时的速度。 接地速度 - 着陆前的接地速度。 接地后反推 - 接地后立即开启发动机反推。 着陆后立即刹车 - 着陆后立即开启刹车。
以下是飞机所在航点区间的数据。 状态 - 阶段描述了自动驾驶仪当前正在执行的操作。 到航点的距离 - 到下一个航点的距离。 目标速度 - 目标速度。 目标高度 - 目标高度。 目标垂直速度 - 目标垂直速度。 目标航向 - 目标航向。 接近跑道时,自动驾驶仪会自动放下起落架。飞机自动驾驶仪 飞机自动驾驶仪可以使飞机保持在您设定的航向、高度和速度。如果您需要驾驶飞机前往地球上的偏远地点,这是一项实用功能。
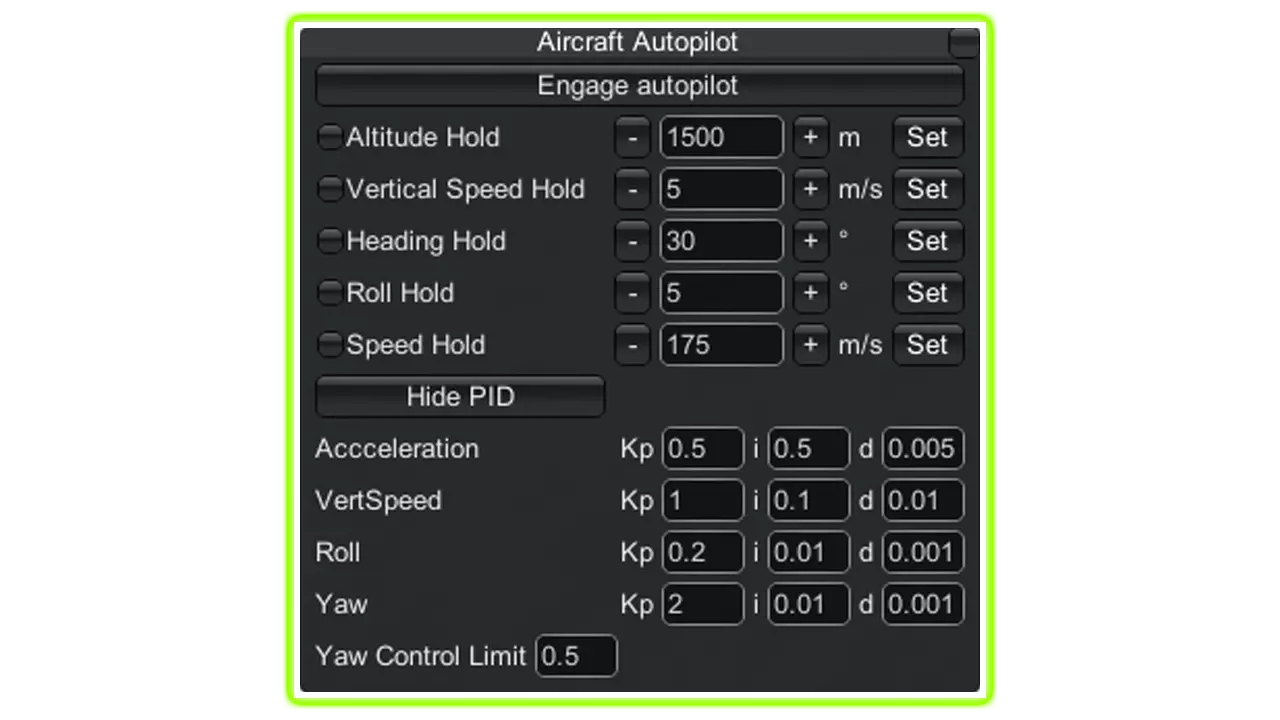
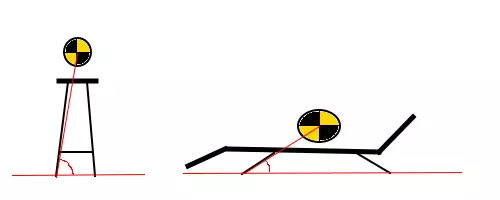
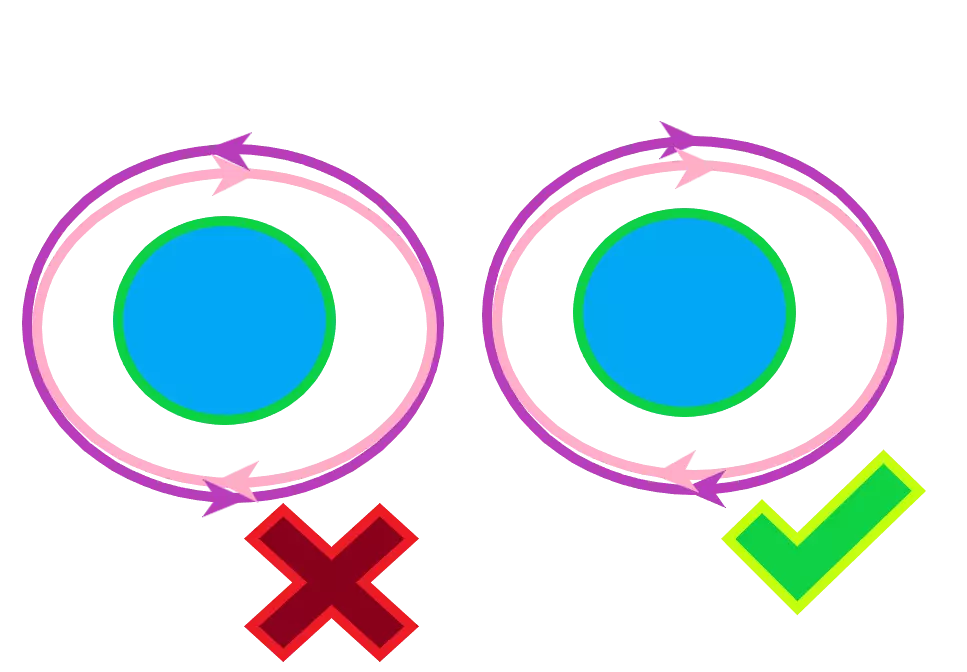
自动飞行 - 激活自动驾驶。 高度保持 - 保持当前飞行高度。 垂直速度限制 - 上升或下降至该高度时的垂直速度限制。 航向保持 - 航向。控制飞机飞行的方向。 滚转限制+ - 改变航向时的飞机滚转角度限制。 滚转保持 - 保持飞机滚转角度。与航向保持不同,飞机会进行盘旋飞行。数值越大,盘旋半径越小。如果需要悬停在某个位置上方,这是个实用功能。 速度保持 - 飞机速度。
左侧,启用横滚保持(Roll Hold)时,飞机会绕圈飞行。右侧启用航向保持(Heading Hold)时,飞机会按设定方向飞行。
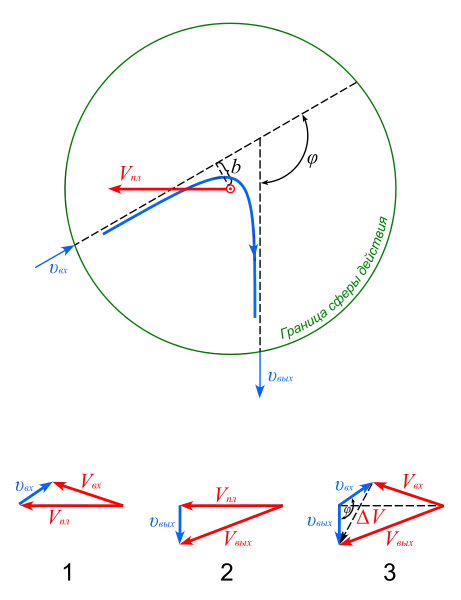
PID - 比例-积分-微分控制器。PID控制器负责自动驾驶仪执行指令的平滑度。所做的更改会针对每种船只类型保存,同名船只将共享相同的设置。
加速度 - 推力 垂直速度 - 垂直速度 横滚 - 横滚角 偏航 - 偏航角 偏航控制限制 - 偏航控制极限
PID参数(Kp、Ki、Kd)的变化对系统过渡特性的影响
Ascent Guidance - 入轨指南 Ascent Guidance模块允许以自动模式将火箭送入稳定轨道。发射也可以指向轨道上的目标或其轨道平面。
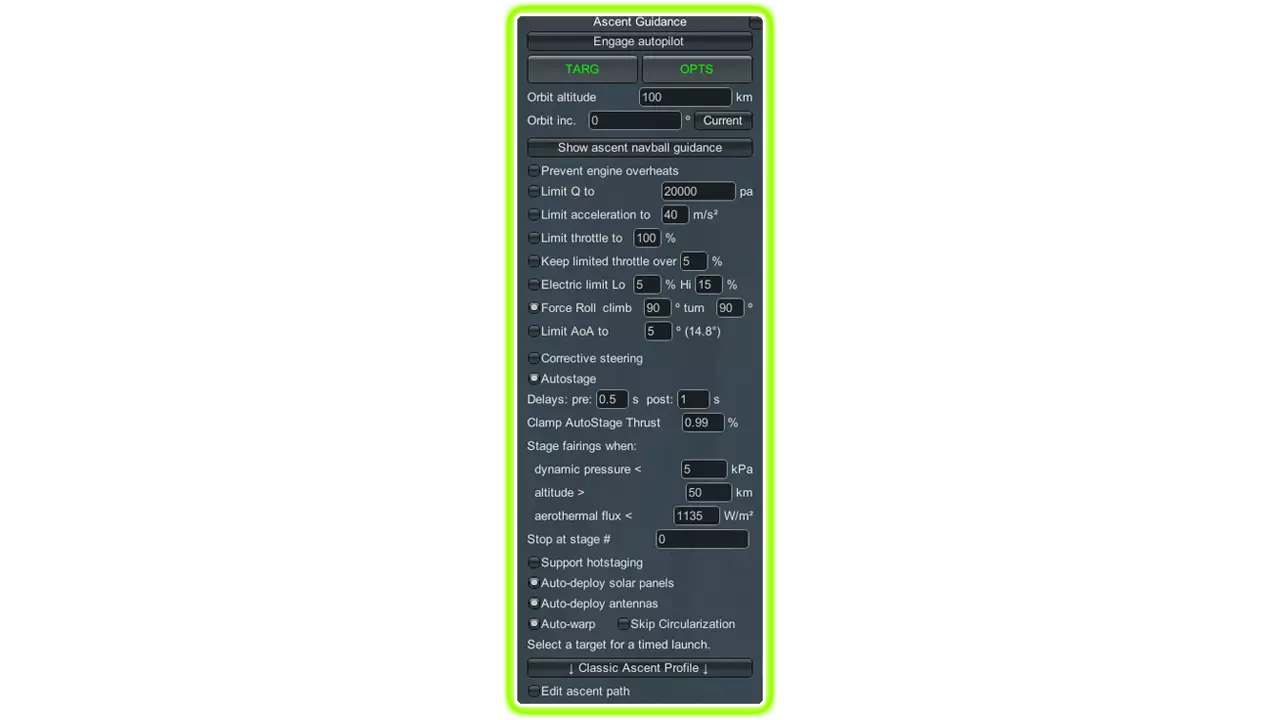
Engage Autopilot - 开启自动驾驶 Disengage Autopilot - 关闭自动驾驶 Orbit Altitude - 火箭应进入的轨道高度 Orbit Inc - 最终轨道的倾斜角度(度)
显示上升导航球指引 - 在导航球上显示标记。标记指示自动驾驶方向,此功能无法使用。
防止过热 - 防止零件过热。 限制Q值至 - 若施加于火箭的压力超过设定值,则降低推力。
限制加速度至 - 最大加速度上限。该参数不会影响固体燃料加速器。
限制引擎推力 - 以百分比形式限制发动机推力。该参数不会影响固体燃料助推器。
保持有限油门 - 该参数与Limit Q相关。当压力过高时,发动机会限制其推力,但不会低于指定百分比。如果火箭没有陀螺仪或稳定器,且仅通过发动机的矢量推力来控制航天器的空间定向,则需要进行调整。
电力限制Lo - 用于控制离子发动机能耗的参数
强制滚转 - 火箭起飞后立即围绕其垂直轴旋转。该参数用于航天飞机和重心不均匀的航天器。
Limit AoA To - 负责火箭倾斜角度的参数。 当压力降低时,自动驾驶仪将开始改变攻角以进入轨道。
Corrective Steering - 增强转向修正控制。该参数在火箭对自动驾驶指令响应不佳时可能会有用。
自动级间分离 - 自动分离已使用的火箭级。默认情况下,空燃料级会在燃料耗尽后0.5秒分离,1秒后启动下一级发动机。
钳位自动级推力 - 该功能无法正常工作或使用频率极低,几乎没有任何相关信息。请将数值保持默认的0.99%。
级间整流罩分离时机 - 整流罩分离场景。默认情况下,当动压降至5帕斯卡、达到50公里高度或热流密度降至1135瓦/平方米时,整流罩将被分离。
停止于级间 - 重置哪个级间后关闭自动级间重置? 如果您想手动重置某个级间,请输入其编号。 MechJeb将重置该级间之前的级间,而不会触动指定的级间。
支持热暂存 - 该功能无法正常工作,或使用频率极低,几乎没有相关信息。若启用,默认值为1秒。
自动部署太阳能电池板 - 在轨道上自动展开太阳能电池板。 自动部署天线 - 在轨道上自动展开天线。 自动跃迁 - 自动加速时间直至下一个机动。
跳过圆形化 - 跳过远地点的轨道圆形化机动。自动驾驶会将火箭引导至你设定的轨道高度,但不会启动发动机完成机动,飞行将变为亚轨道飞行。
编辑上升路径 - 启用上升路径编辑器
轨道上升路径编辑器 - 更改进入轨道的参数。有关此参数的完整说明,请参见“上升制导 - 轨道上升路径编辑器”章节。
选择定时发射目标 - 该参数用于自动将火箭发射到所选目标附近的轨道。 要激活此功能,需先选择轨道上的目标。按下【M】键,在地图上选择您想要接近的物体、空间站或火箭,然后点击【设置目标】。 只有在选择目标后,后续参数才会可用。发射倒计时 - 应在何时关闭加速并开始倒计时? 发射至会合点 - 向目标发射。此参数用于直接向目标发射火箭,完成机动后您与目标的距离将最小,约为1公里。 发射至目标轨道平面 - 最终轨道将与目标轨道具有相同的平面、方向和半径。
如何将火箭对准目标或进入目标平面? 引用自Dzheo:首先在轨道上选择目标。在Ascent Guidance窗口中关闭"TARG"和"OPTS"。然后选择【Launch To Rendezvous】或【Launch Into Plane Of Target】,会出现发射倒计时。只需将控制权交给自动驾驶仪,按下【Engage Autopilot】,时间会自动加速到发射时刻。使用【目标平面发射】(Launch Into Plane Of Target)的视频。
Ascent Guidance - çé˘

在【Ascent Guidance】中有很多参数,其中大多数只需设置一次。因此,未使用的参数可以部分隐藏或显示。 TARG - 该按钮用于显示目标轨道及其倾角,若已选择目标,则显示其参数。 OPTS - 选项。按住该按钮可显示上述所有设置和参数。 Ascent Guidance - 上升路径编辑器
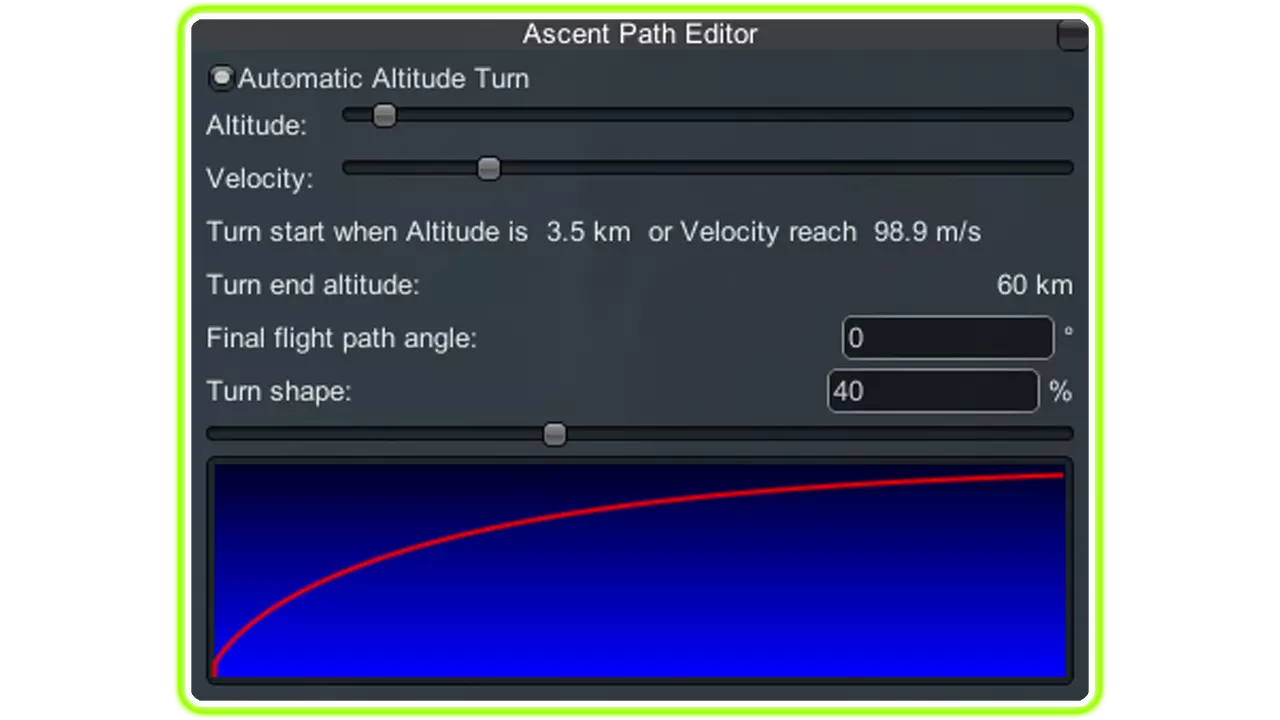
自动模式下,会设置高度和速度。 高度 - 海拔高度 速度 - 速度 最终飞行路径角 - 最终飞行轨迹角度 转弯形状 - 进入轨道时的俯仰角平滑度。 当高度或速度达到指定值时,将开始进入轨道的机动。 红线表示预计的起飞轨迹,白线表示当前的飞行轨迹。火箭发射时会出现白色线条。
Ascent Path Editor - 手动模式
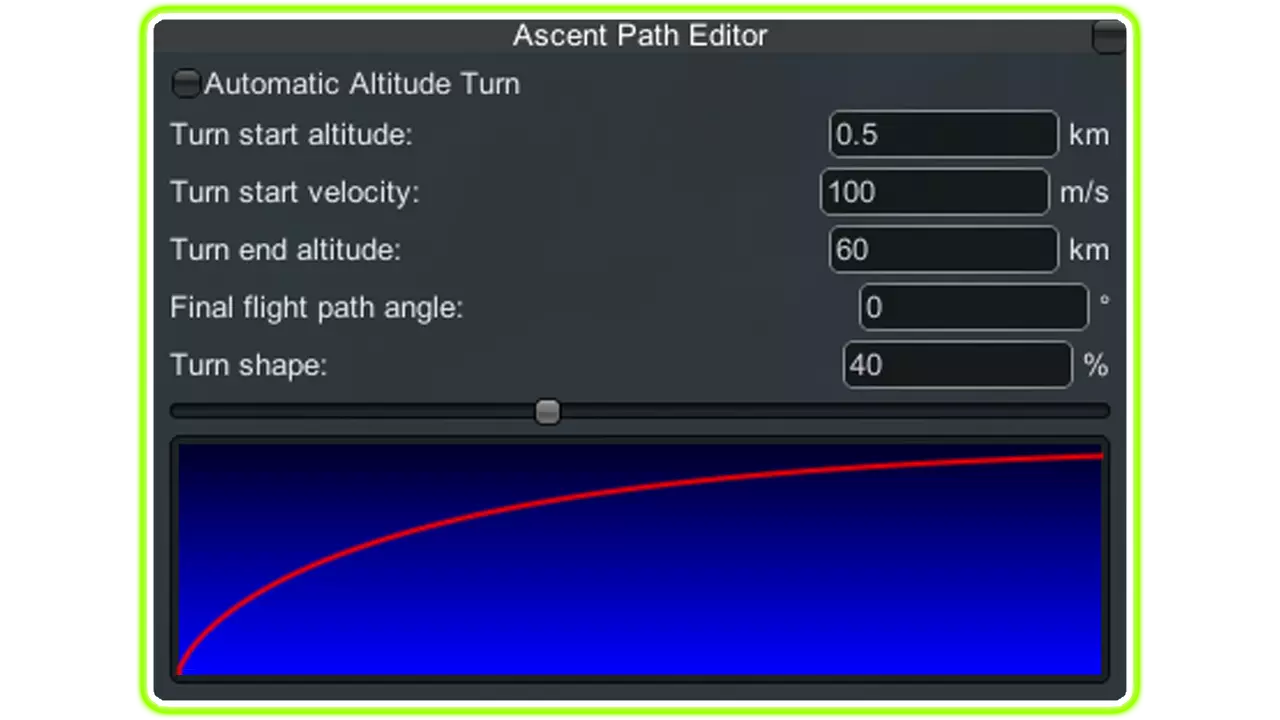
自动高度转向 - 关闭自动模式。 转向开始高度 - 达到指定高度时,设备将开始转向。 转向开始速度 - 或达到指定速度时开始转向。 转向结束高度 - 在此高度,俯仰角将固定为下方指定值。 最终飞行轨迹角 - 飞行轨迹的最终角度。 默认情况下,达到上述值后,设备将以0度倾角飞行。 转向形状 - 设备倾角的平滑度Ascent Guidance - 配置文件 引用自 Dzheo:我没有足够的空间将所有内容放在一个部分。Ascent Guidance 中有一个配置文件选项卡,共有三个配置文件。关于第一个主要的经典配置文件“Classic Ascent Profile”,我已经在上面的部分介绍过了。另外两个配置文件的信息包含在这里。
Stock-Style GravityTurn™此配置文件有一个中间高度参数,它用于控制双椭圆过渡轨道。在某些情况下,使用双椭圆过渡所需的德尔塔V(Delta-V)比使用经典上升配置文件的发射要少。 Stock-Style GravityTurn™是一个分三个阶段进入轨道的配置文件。
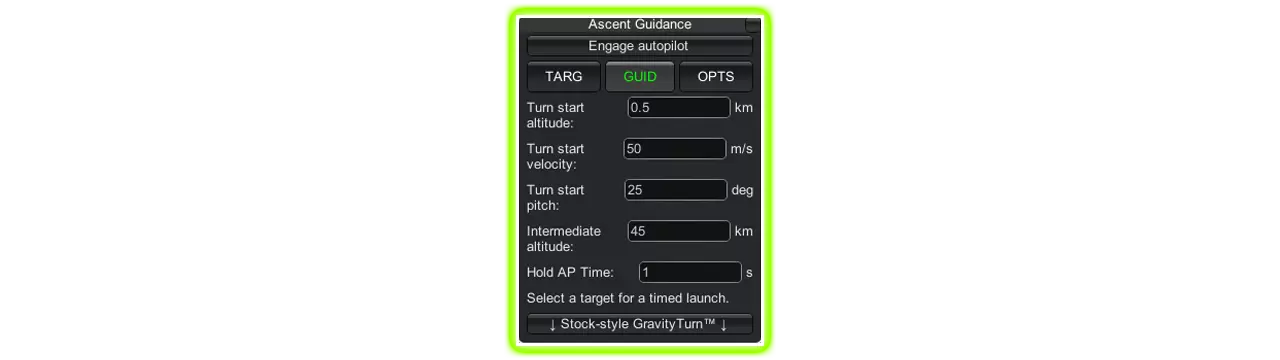
启动高度 - 达到指定高度后改变攻角。 初始高度(单位:千米),达到该高度后开始重力转弯。 推力较小的火箭应设置更高的数值。
转弯起始速度 - 达到指定速度时开始重力转向。重力机动的初始转弯速度。推力较小的火箭应使用较高数值。
Turn Start Pitch - 改变俯仰角。 重力翻转将从此俯仰角开始。
中间高度 - 中间高度。 中间高度为远地点,之后将远地点提升至最终目标轨道。 可将其设置为最终目标值,以跳过中间阶段。
AP保持时间 - 在中间高度停留的时间。 当距离远地点剩余时间较长时,发动机会消耗燃料,将喷口向下以保持远地点高度。这类似于执行指定的机动节点,但如果玩家过早开始燃烧,则会向下节流。
选择定时发射目标
primer vector guidance(rss/ro)是来自测量者号任务的真实重力转向算法,能够正确整合轨迹。该配置文件在《坎巴拉太空计划》中可能不会那么有用,因为它无法执行两阶段入轨。因此,大多数运载火箭难以操控,因为如果要进入100×100的轨道,就需要一个持续点火的级段,以100%推力无节流地工作,直到进入100×100轨道后发动机关闭。此为使用【 primer vector guidance】的视频内容。
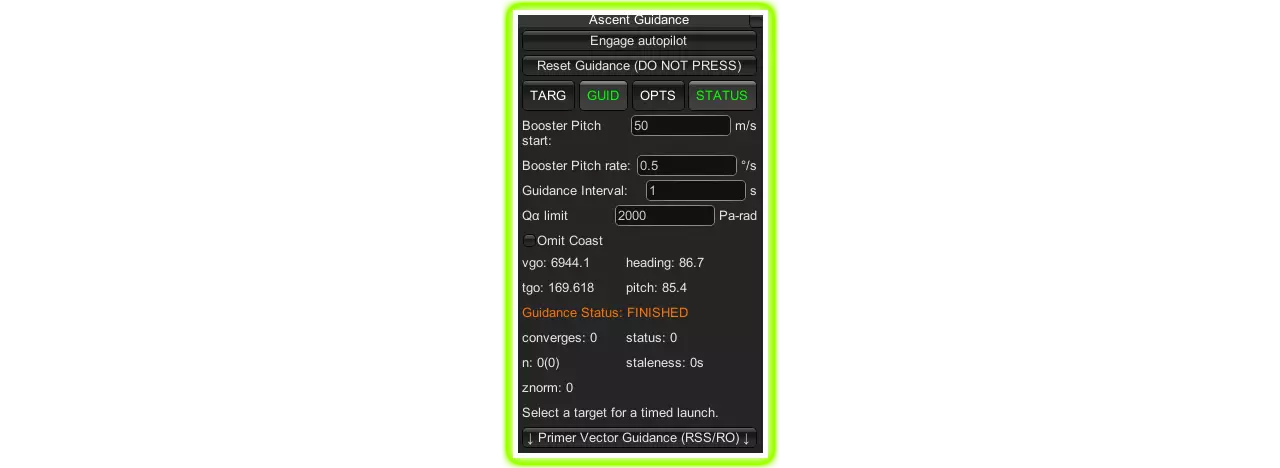
重置导航(请勿按压)- 重置导航。请勿按压! 推进器初始推力 - 初始推力。 推进器推力系数 - 推进器增强系数。 导航间隔 - 导航间隔。 Qa限制 - 这是什么? 省略滑行 - 这是什么? 姿态调整 - 调整方向
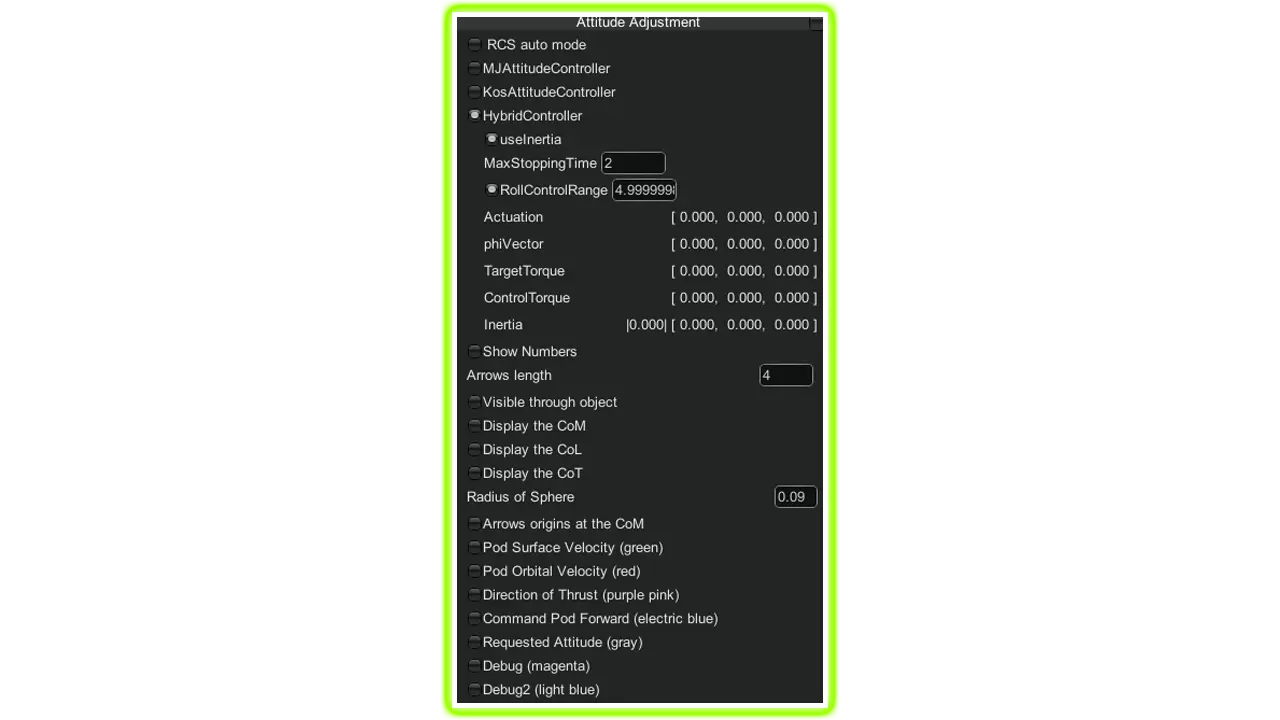
这里可进行方向调节和控制响应的精确设置。 引用自Dzheo:普通玩家可能用不到这个模块,而熟悉航模和遥控飞行器设置的玩家,无需我这点浅薄的知识也能弄明白。 因此我只翻译了普通玩家可能会用到的最简单参数。
RCS自动模式 - 自动RCS模式。 MJ姿态控制器 - 姿态控制。 Kos姿态控制器 - 允许自行编写程序代码。 混合控制器 - 混合控制器。
箭头长度 透过物体可见
质心、推力矢量和升力中心,这些数据是游戏默认提供的,在建造火箭或飞机时可在机库中查看其显示。 姿态调整(Attitude Adjustment)能在飞行中实时显示这些数据。 显示质心(CoM)- 质心(红色球体)。 显示升力中心(CoL)- 升力中心(蓝色球体)。 显示推力矢量(CoT)- 推力矢量(黄色球体)。 球体半径 - 显示球体的半径。
【箭头起源】在指挥舱 - 航天器上的方向箭头位置。 舱体表面速度(绿色)- 移动方向(绿色箭头)。 舱体轨道速度(红色)- 轨道速度方向(红色箭头)。 推力方向(紫粉色)- 推力方向(紫色箭头)。 指令舱前方(电子蓝)- 航天器头部方向(蓝色箭头)。 请求姿态(灰色)- 所需姿态(灰色箭头)。 调试(品红色)- 调试(紫红色箭头)。Debug2(浅蓝色)-指向起始位置。(蓝色箭头)。 自定义窗口编辑器-窗口编辑器 窗口设置。在自定义窗口编辑器中可以调整窗口透明度,更改窗口颜色和文本颜色。创建新窗口、删除窗口、锁定窗口移动。
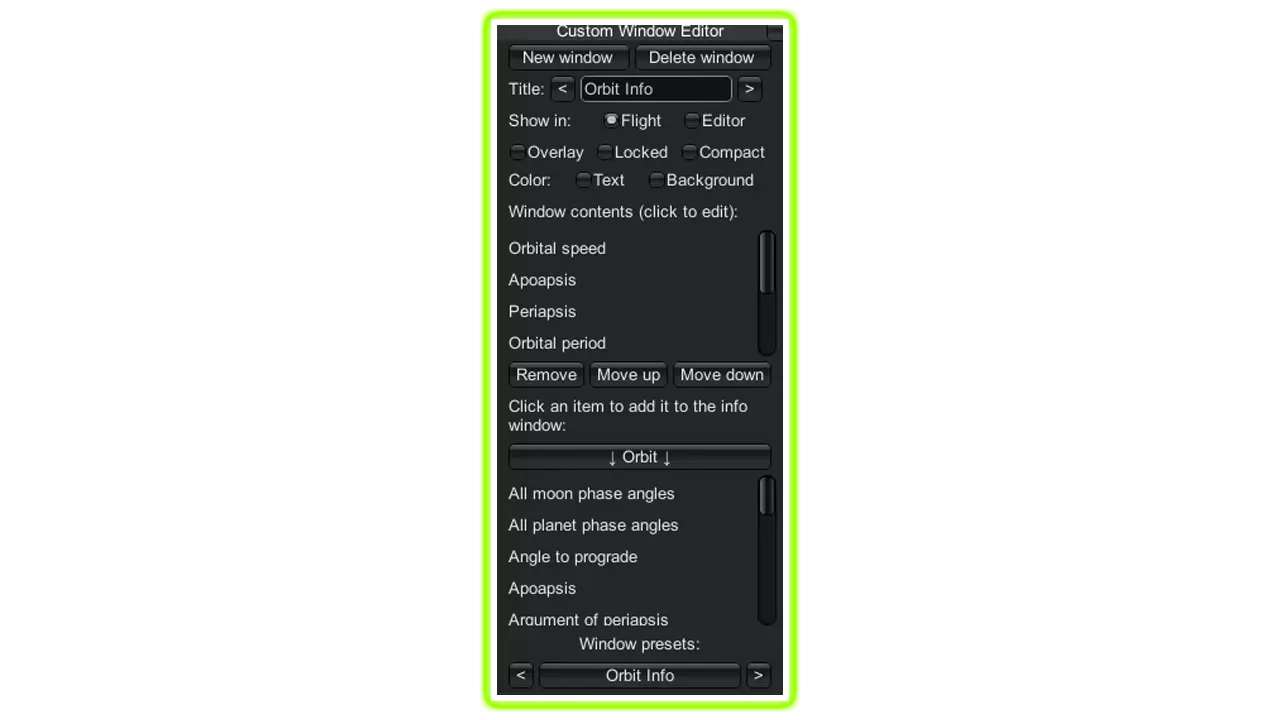
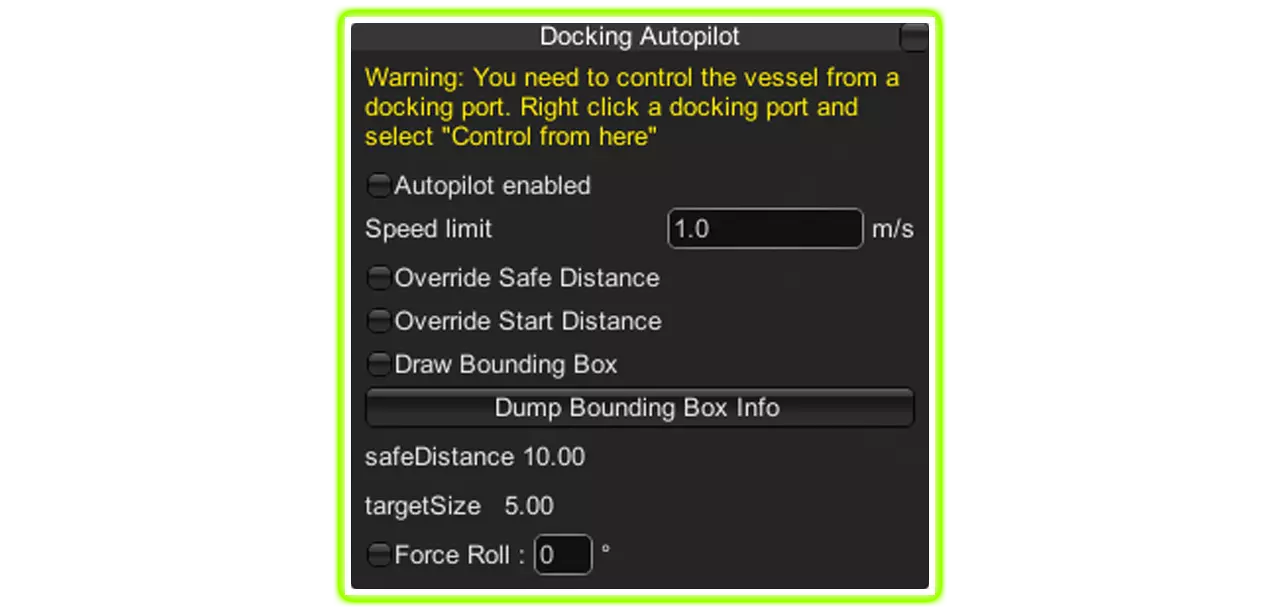
新建窗口 - 创建新窗口 删除窗口 - 删除标题栏中位于下方的窗口 覆盖 - 移除边框 锁定 - 禁止窗口移动 紧凑 - 缩小行间距 颜色 - 更改【文本】和【背景】的颜色 【窗口内容点击编辑】- 此处显示窗口中包含的参数列表。可通过【上移】【下移】按钮调整顺序,或点击【移除】进行删除。点击项目可将其添加到信息窗口。下方是窗口列表及其内容。您可以创建自己的【新窗口】,然后从窗口列表中添加参数。 窗口预设:包含现成窗口。如果您删除了某些内容,可以从此处重新添加。 对接自动驾驶:对接 对接自动驾驶可在太空中自动进行对接。
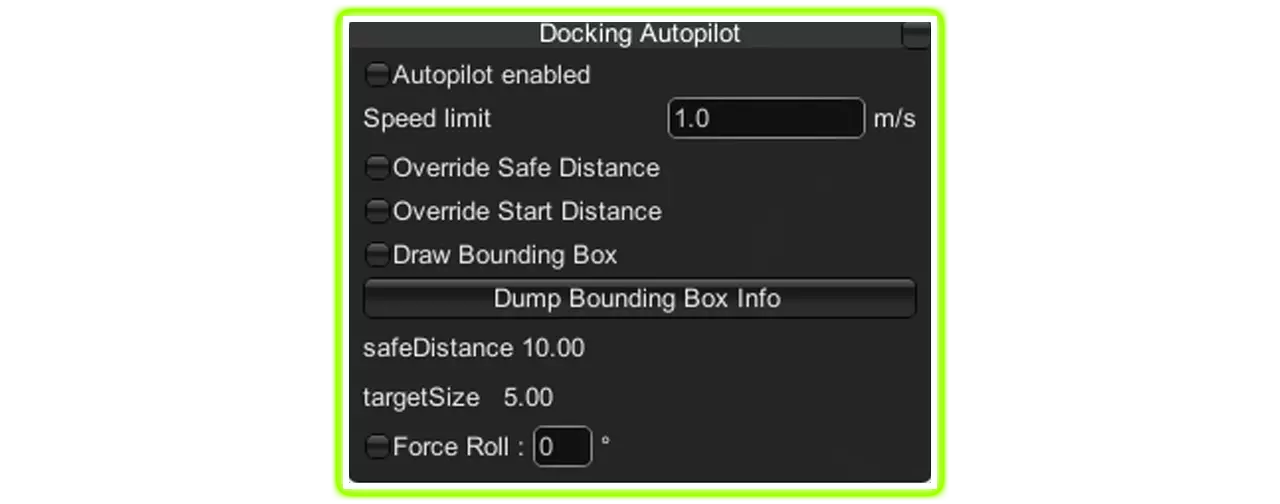
要激活参数,需先选择目标。 自动驾驶已启用 - 开启自动驾驶。 速度限制 - 接近速度。 忽略安全距离 - 安全距离。 忽略起始距离 - 起始距离。 绘制边界框 - 显示边界框。 “转储边界框信息” - 边界框信息。 “安全距离” - 安全距离。 “目标大小” - 目标大小。 “强制横滚” - 相对目标的横滚角度。
对接前,需选择您飞船的对接端口,右键点击该端口,然后在菜单中选择【从此处控制】。若未执行此操作,将显示警告提示。
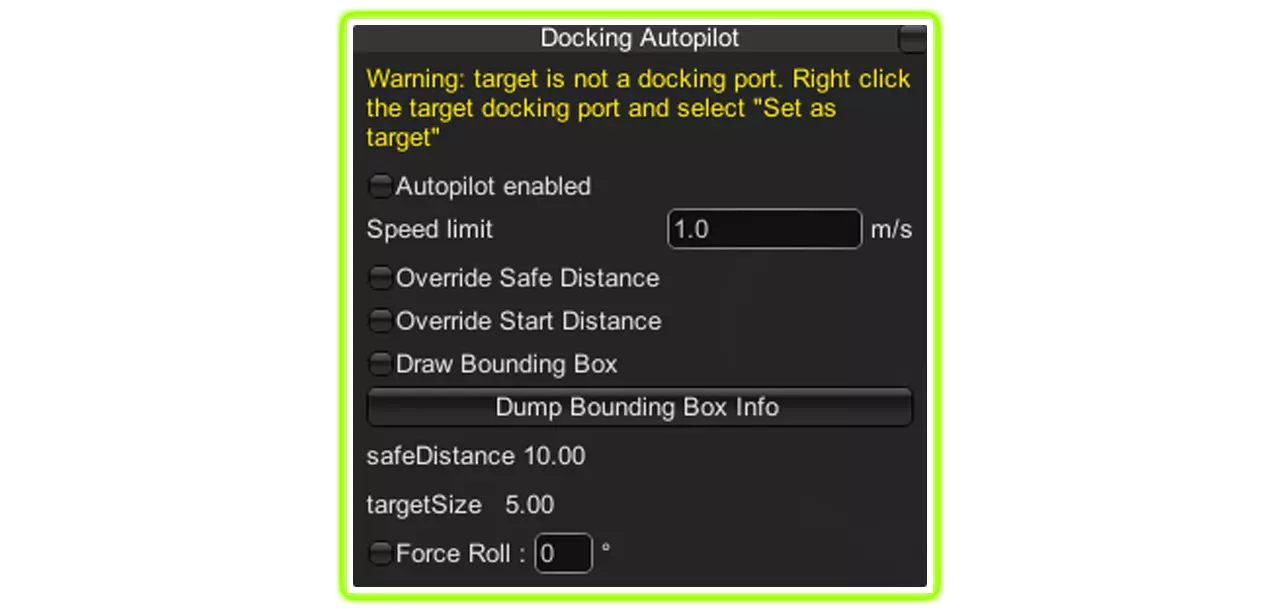
如果您距离目标较远,将无法选择需要对接的目标对接端口。这种情况下会出现警告【目标不是对接端口。右键点击目标的对接端口并选择“设定目标”】。尽管有此警告,自动驾驶仍会运行并自动选择对接端口。但需要注意的是,自动驾驶可能会选择已被占用的对接端口。因此不要忽略警告。
物体附近的对接视频。 飞行记录器 - 飞行记录仪 飞行记录仪就像黑匣子,它以图表形式记录并显示船上资源数量、高度、质量和速度等信息。
第一行 Pause - 暂停录制。 Downrange - 切换所列参数图表的显示方式,按距起点的水平距离(Downrange)或按时间。 Time - 从开始或重置飞行记录仪后的时间。 Downrange - 从飞行起点或重置后的距离。 Mark - 重置数据。 Reset Scale - 重置缩放比例。
自动缩放 - 图表显示格式,右侧可调整窗口比例。 真实大气 - 改变背景渐变效果,以显示您的实际高度。
图表上显示的标识 Stages - 级间分离 Altitude - 海拔高度 True Altitude - 地形海拔高度 Acceleraton - 加速度 Surface Speed - 速度 Orbital Spead - 轨道速度 Mass - 质量 Q - 气动压力 AoA - 正攻角 AoS - 负攻角 AoD - 偏航角 Pitch - 俯仰角 ΔV - ΔV消耗 Gravity Loss - ΔV重力损失 Drag Loss - ΔV大气阻力损失转向损耗 - 改变朝向时的ΔV损失
Q、重力损失、阻力损失和转向损失的详细说明。 Q: 空气动力压力取决于空气密度和速度。当你起飞时,空气密度下降缓慢,而速度迅速增加,因此图表快速上升。空气密度随高度呈指数下降。在某个时刻,密度开始急剧下降,以至于即使进一步提高速度也无法使Q值继续增加。随着Q值的进一步上升,它反而会下降。Q值曲线的最大值,即Q值停止上升并开始下降的点,被称为【MaxQ】——最大气动压力。在发射直播中,人们常说“到达最大动压点”或“通过最大动压点”,以此表示过了这个点后,火箭因空气阻力而解体的可能性会比之前小。
重力损失 当你悬停在同一高度时,推重比(TWR)等于1,且发动机的推力矢量垂直向下。发动机仅用于对抗重力,会消耗ΔV( delta-V,速度增量),但你既不会上升也不会加速。所有的ΔV都被用于对抗重力。当推重比大于1时,你开始向上加速,但只有超过重力的那部分推力会使你加速,其余部分的推力同样在无用地对抗重力。因此,只有超过重力的那部分推力(以及相应的ΔV)才会产生有效作用。也就是说,推重比(TWR)越大,重力损失就越小。当你开始倾斜时,推力矢量已经与重力矢量形成一定角度,此时推力矢量的垂直分量会使你向上加速,而水平分量则会使你向侧面移动。实际上,这个垂直方向的推力向量持续时间越长,重力损失就越大,因此需要尽可能快地将火箭调整到水平方向,这样ΔV(速度增量)就能用于水平加速,而不是用来对抗重力。
诱导阻力:Q值和迎角越大,诱导阻力就越大。要减小诱导阻力,可以在最大Q值(MaxQ)前降低推力,并使机头与速度矢量的偏转角尽可能小。
转向损耗 这包括任何未用于飞船加速,而是用于改变其朝向的ΔV(速度增量)。例如,具有可控推力矢量的发动机。在未偏转状态下,推力矢量正好通过质心,但当矢量发生偏转时,会产生使飞船旋转的力矩。同样,部分推力(以及相应的ΔV)继续用于加速飞船,而另一部分则使其产生旋转,即不用于加速飞船。或者另一个例子,当使用定向发动机而非陀螺仪来改变方向时。
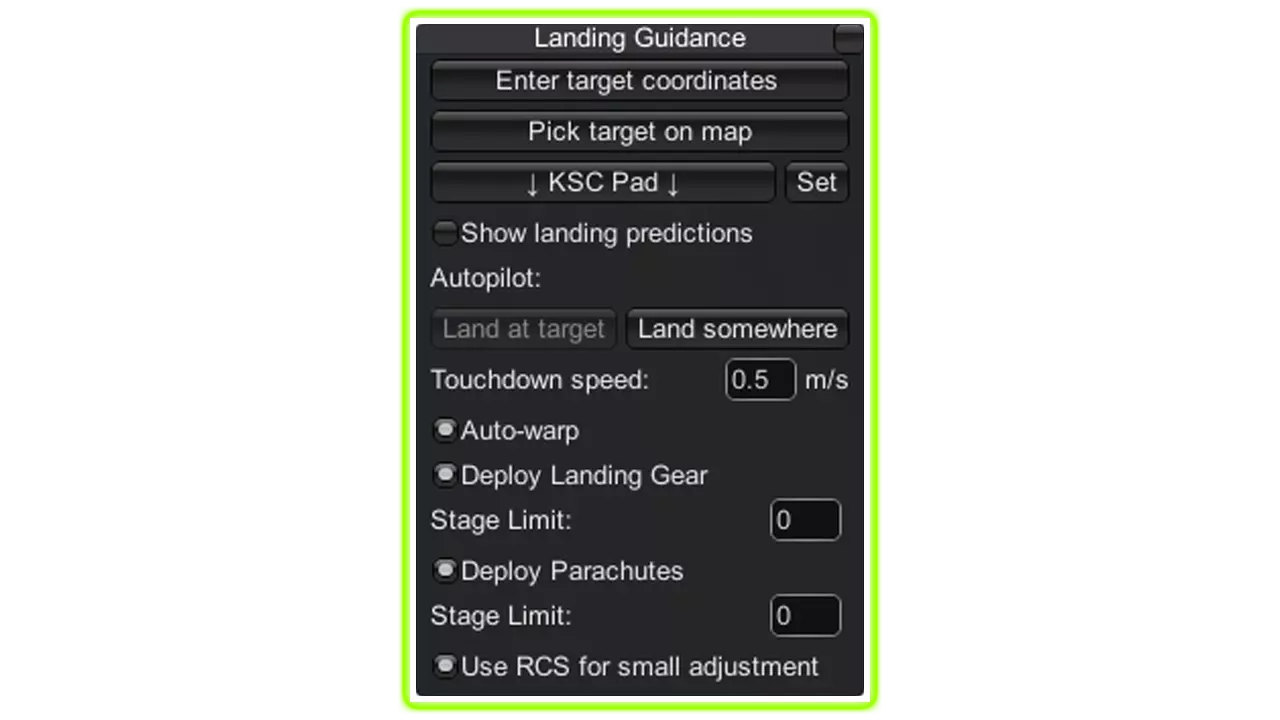
着陆引导模块 - 着陆指南 着陆引导模块旨在实现着陆过程的自动化和简化,无论是使用降落伞还是发动机。若要在特定地点着陆,可以输入坐标、在地图上选择地点,或选择一个将在其附近进行着陆的目标。若发生非目标着陆,自动驾驶仪会自行选择着陆地点。
输入目标坐标 - 输入着陆坐标。 输入坐标时,您将在地图上直观地跟踪着陆点标记。 偏移按钮有助于防止您的飞船降落在其他物体上方。 按钮的步长为10米,在激活自动驾驶前可用于移动标记。 标记坐标下方将显示海拔高度和位置名称。
在地图上选择目标 - 指定地图上的着陆地点
以下菜单仅在您位于坎星或其轨道时显示。 您可以在下方选择坎星上的着陆地点,共有四个: KSC Pad - 坎巴拉太空中心发射台 VAB - 坎巴拉太空中心机场 Desert - 沙漠机场 Woomerang - 回旋镖发射台 Set按钮 - 确认所选地点。
显示着陆预测 显示大气制动节点 显示下降轨迹 世界轨迹 - 显示包含机翼空气动力学计算的轨迹 相机轨迹(开发中) - 显示着陆位置的标记
着陆目标点 - 降落在指定目标位置。 任意地点着陆 - 在任意地点着陆,自动驾驶会自动选择地点。 着陆速度 - 与地面接触时的速度。 自动加速 - 时间自动加速。 部署起落架 - 自动伸出起落架。 阶段限制 - 在特定阶段前伸出起落架。 打开降落伞 - 自动打开降落伞。 阶段限制 - 在特定阶段前打开降落伞。使用RCS进行微调 - 使用RCS引擎进行小幅调整
当自动驾驶激活时,会显示一些信息。 自动着陆除外。 【着陆预测】:下方显示预计着陆坐标。 海拔高度(米)。 游戏内地点名称。 【目标距离差】:与目标的距离差异。 【最大阻力】。 【所需Delta-V】:着陆所需的Delta-V值。 【着陆时间】:距离着陆的剩余时间。机动节点编辑器 在机动节点编辑器窗口中,你可以高精度地设置即将进行的机动。 激活窗口的步骤如下: 1. 首先需要创建机动。 2. 用鼠标左键点击你的轨道。 3. 然后点击【添加机动】。
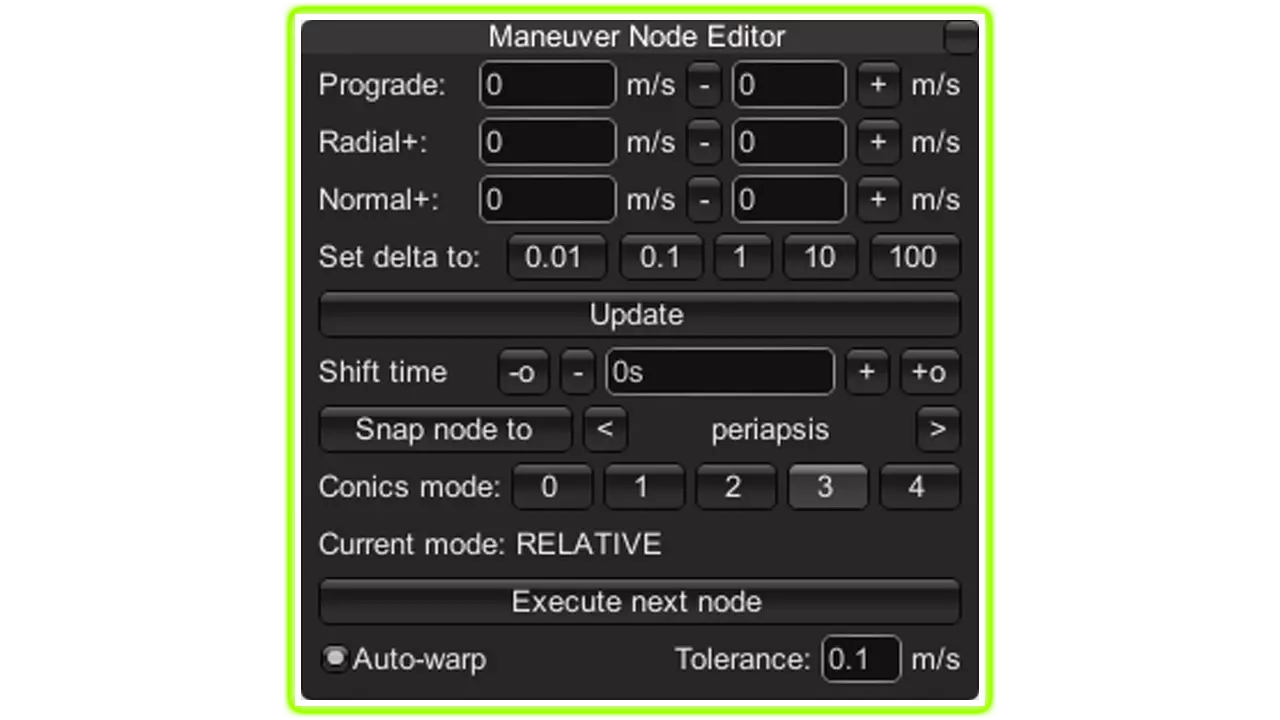
前三个参数用于改变即将进行的机动。 前进方向 - 顺向、逆向。 径向 - 径向向外、径向向内。 法向 - 法向、反法向。 左侧窗口显示您所做的更改,若要重置这些更改,只需将所有参数设为零。按下减号和加号按钮可改变轨道,右侧窗口显示轨道的变化步长。可以输入自定义值,或点击“Set Delta To”旁边的按钮选择预设值。
更新 - 若您手动输入了数值,点击此按钮即可确认并应用更改。 时间偏移 - 可通过减号和加号按钮调整机动开始时间,窗口中显示的是即将进行的机动将被偏移的时间量。 节点吸附至 - 吸附节点。可吸附至远拱点或近拱点。 圆锥曲线模式 - 轨迹绘制模式。当您的轨道与其他天体的影响范围相交时,变化将会显现。 0 - 本地。天体。 1 - 本地。进入引力范围。 2 - 本地。离开引力范围。 3 - 相对。 4 - 动态。
当前模式 执行下一节点 自动加速 允许偏差 机动规划器 机动规划器包含多个用于不同类型任务的模块,我为主要模块创建了标题,以便更简单清晰地介绍它们的功能和意义。
高级行星转移——Porkshop Selection工作模式 此模块通过计算行星处于最佳距离时的发射时间,最大限度减少星际旅行的ΔV消耗。 通常,这种机动的时间窗口相当罕见,每年一次甚至更久。要激活模块,需选择目标行星作为航行目的地。梯度图显示特定时间段内的ΔV消耗。蓝色表示进行机动时燃料消耗最少的时间段。要放大地图,需按住鼠标左键并选择要放大的区域。在地图下方的左下角,当您在地图上移动光标时,会显示ΔV值,该值会随之变化。右上角有重置按钮,用于重置地图缩放比例。在“选择”字样对面有两个按钮:最低ΔV和最快出发。第一个按钮“最低ΔV”会自动选择ΔV消耗最小的发射窗口,而“最快出发”则选择最近的发射窗口。这种情况下燃料消耗会比第一种情况多,但能更早出发。下方的“出发等待时间”和“航行持续时间”分别表示机动等待时间和航行时间。如果您在地图上移动鼠标或选择最低ΔV(最低ΔV)或尽快(ASAP),时间将会改变。点击地图,然后点击创建节点按钮,即可创建机动节点。
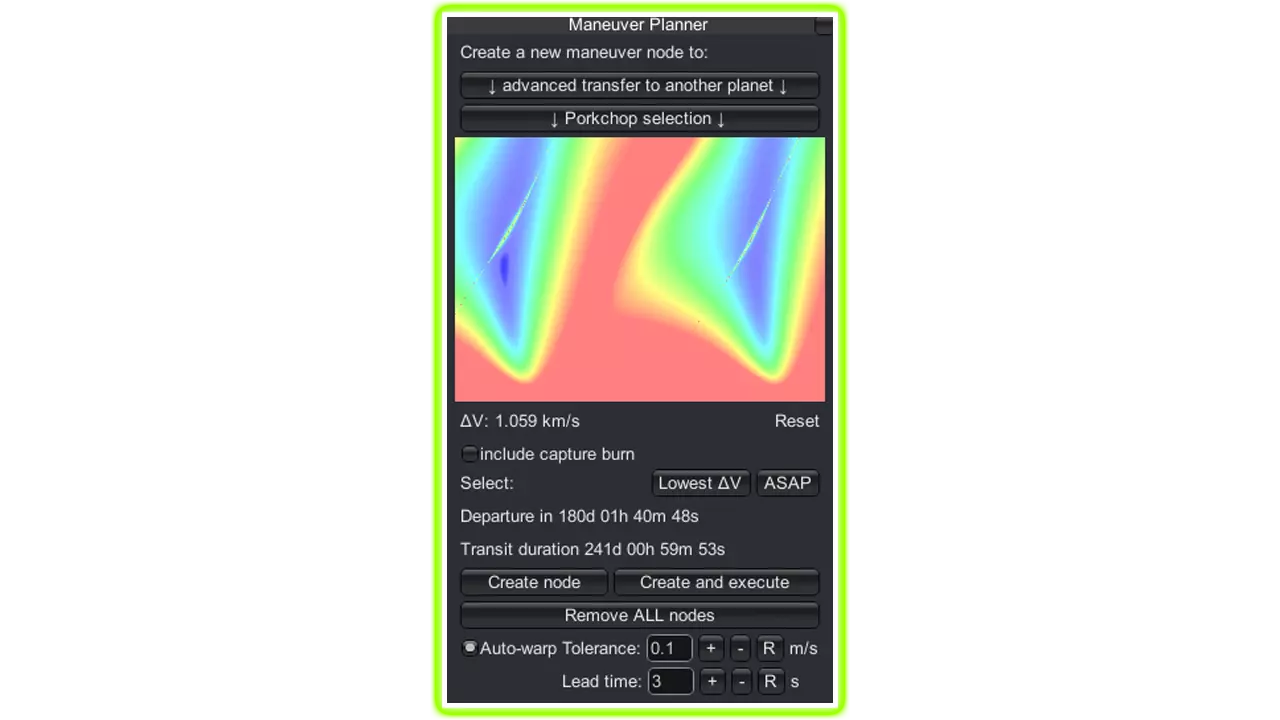
猪肉排选择 - 工作模式切换。 包含捕获制动 - 显示目标行星的制动ΔV消耗。 最低ΔV - 最低ΔV。 ASAP - 尽快。 出发时间 - 间隔 maneuver。 航行持续时间 - 航行持续时间。 创建节点 - 创建 maneuver 节点。 创建并执行 - 创建并执行。 移除所有节点 - 移除所有 maneuver 节点。 自动加速 - 自动时间加速。 容差 - 允许偏差。 提前时间 - 执行时间。
高级行星转移 - 限时模式 在限时模式下,点击创建节点时,最大到达时间窗口将显示最佳发射时间。您可以将发射推迟到任何需要的时间。 例如25年100天04小时25分钟40秒。 机动规划器将为该日期选择消耗ΔV最小的最佳窗口。

最大到达时间
双脉冲(霍曼)转移至目标 - 转移到目标轨道及目标本身。用于在同一引力范围内接近船只或卫星。
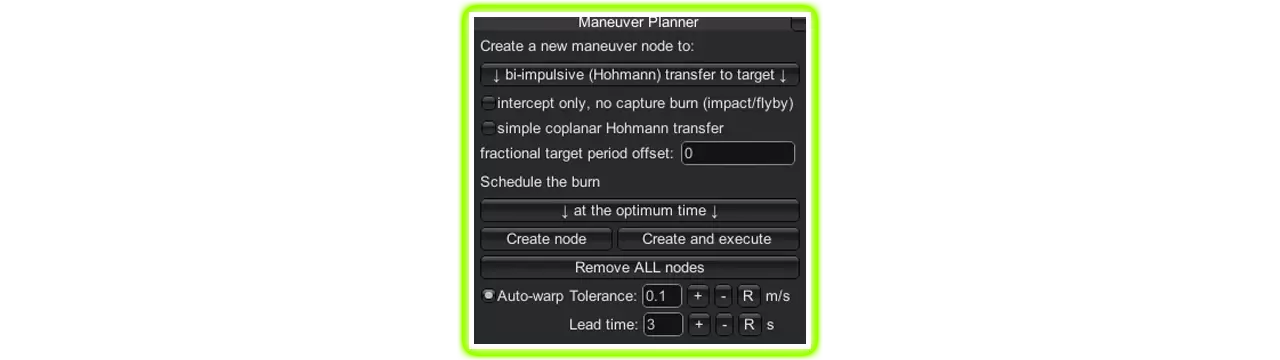
仅拦截,不捕获燃烧(撞击/飞越)-仅拦截目标。 简单共面霍曼转移-简单共面转移。 目标周期分数偏移-机动节点偏移。
安排点火 - 选择启动条件。 在最佳时机 在下次近拱点 在下次远拱点 经过固定时间后 在指定高度 在赤道降交点 在赤道升交点 在与目标最近的升交点/降交点 在与目标的下次升交点 在与目标的下次降交点At Closest Approach To Target - 最接近目标时
次要模块 变更远地点 - 改变远地点。
更改近地点和远地点(Pe和Ap)
变更轨道倾角
变更升交点经度
改变近拱点(periapsis)
变更半长轴
变更近地点经度(改变拱点经度)
圆化轨道 - 使轨道变为圆形。
微调至目标最近距离
在选定时间拦截目标
匹配轨道平面与目标 - 将轨道平面与目标对齐。当你的轨道和目标轨道处于不同平面时使用此功能。
与目标匹配速度 - 使自身速度与目标保持一致。用于在接近目标时减缓相对运动速度。
共振轨道 - 新轨道与旧轨道的比例变化。 参数【新轨道周期比】用于改变新轨道与当前轨道的比例。
从月球返回 - 从月球归来。通过此模块,不仅可以从月球返回Kerbin,还能从任何其他天然卫星的轨道返回其绕行行星的轨道。
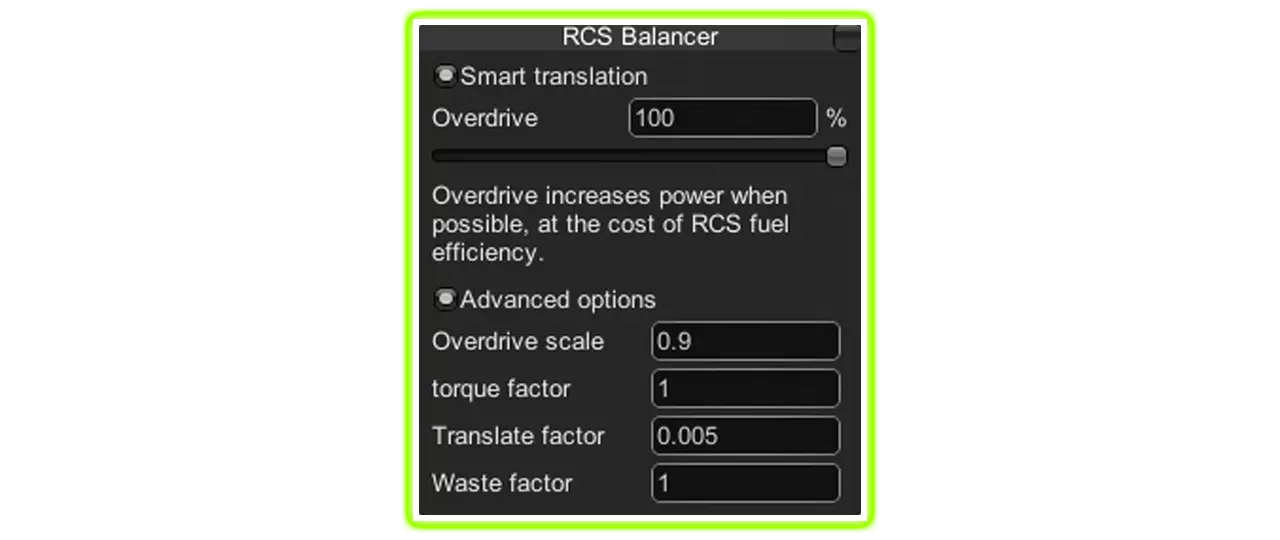
转移到另一个星球 - 转移到另一颗行星。 可以选择【下一个转移窗口时】,在最近的下一个窗口开始。 或者【尽快】,尽快开始。 RCS平衡器 - 模块无法工作 RCS平衡器模块已不再运行。 用户Delliardo于2014年发布的文章。
交会自动驾驶仪 - 简单会合 与轨道目标的简单会合。要激活交会自动驾驶仪,请选择目标。重要的是,您和所选目标必须位于同一行星或卫星的引力范围内。例如,如果您位于Kerbin轨道,而目标选择在Mun轨道,则自动驾驶仪将无法工作。
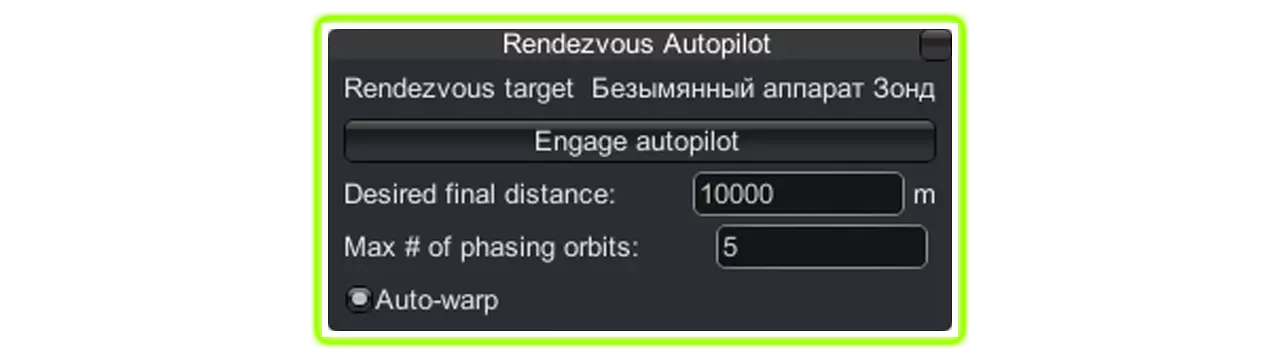
会合目标 - 选定目标。 启用自动驾驶 期望最终距离 - 与目标接近时的期望距离。 最大相位轨道数 自动加速 - 时间自动加速。
什么是最大阶段轨道数量? 引用自Dzheo:这是自动驾驶仪为达成目标而创建的中间轨道。 交会规划器 - 与目标交会 交会规划器具有扩展功能和灵活的轨道调整设置,以便后续与目标进行接近。与交会自动驾驶仪不同,这里包含更多的参数和功能。要激活参数,需要选择目标。
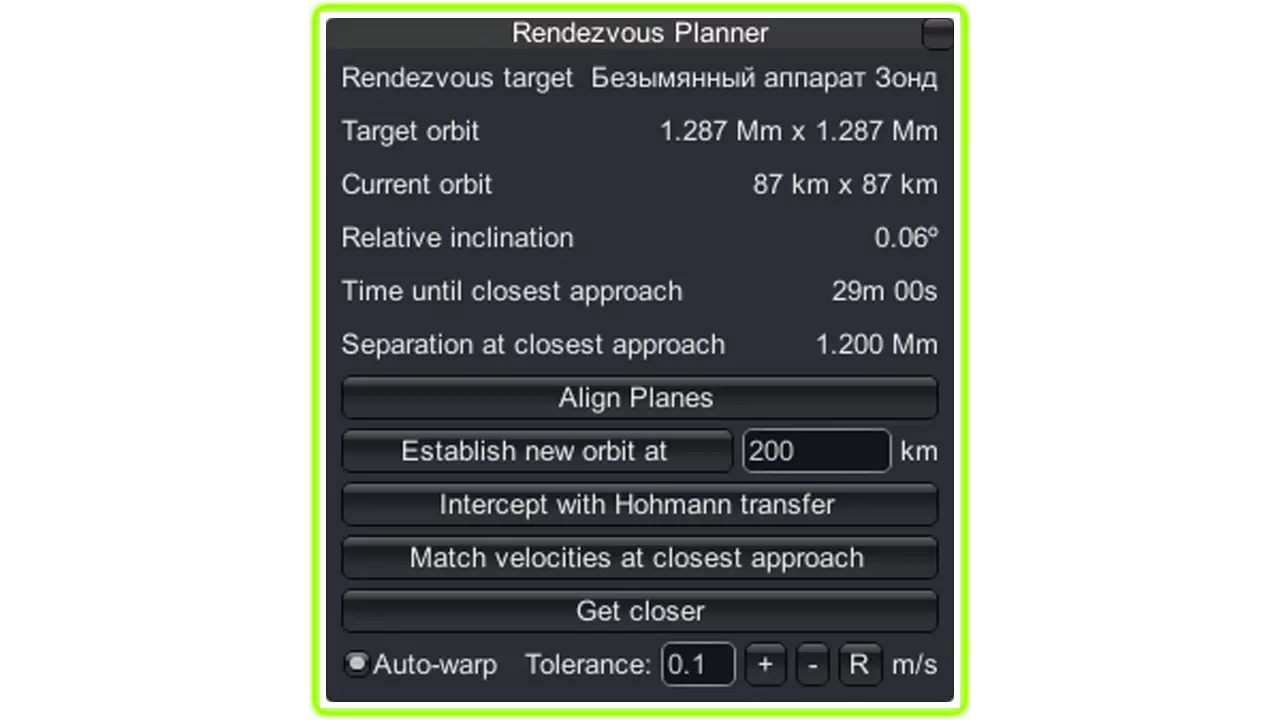
会合目标 - 选定目标。 目标轨道 - 目标轨道。 当前轨道 - 当前轨道。 相对倾角 - 相对倾角。 最近接近时间 - 至最近接近的时间。 最近接近时的距离 - 最近接近时的距离。 轨道平面对齐 - 对齐轨道倾角。 在【指定位置】建立新轨道 - 在【指定位置】建立新轨道。 霍曼转移拦截 - 霍曼转移拦截目标。 最近接近时匹配速度 - 最近接近时匹配速度。 靠近 - 最近接近点。执行下一个节点 自动加速 - 自动时间加速 容差 - 允许偏差 漫游车自动驾驶 漫游车自动驾驶用于控制地面交通工具。通过它可以设定航向和速度,规划漫游车将要行驶的航点。
航向控制 - 方向控制。 航向 - 方向。 航向误差 - 方向偏差。 速度控制 - 速度控制。 速度 - 速度。 速度误差 - 速度偏差。 稳定性控制 - 稳定性控制。 飞行员弹射时制动 - 飞行员弹射时制动。 能量耗尽时制动 - 能量耗尽时制动。 能量耗尽时时间快进到白天 - 能量耗尽时时间快进到白天。 目标速度 - 目标速度。航点索引 - 当前漫游车所在的航点编号/总航点数量。 航点 - 航点设置菜单。
这些参数仅在选择目标后出现。
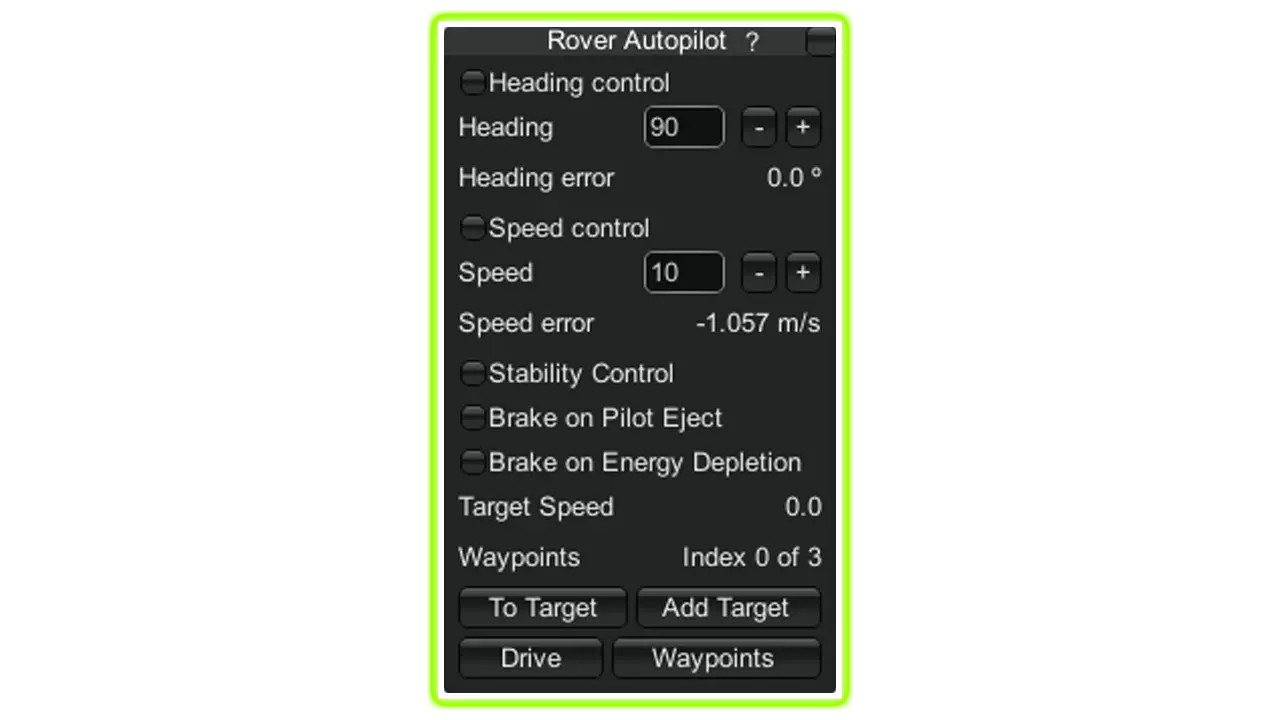
前往目标 - 向目标移动。 添加目标 - 添加目标。 此参数在至少设置一个路径点后出现。
驾驶 - 开始按航点行驶
漫游者航点 - 路径点 在此窗口中可以创建漫游者将遵循的路径点。 通过这种方式创建的路线可以保存并在后续使用。

添加路径点 - 添加路径点。 移除 - 删除路径点。 上移 - 将路径点上移一行。 下移 - 将路径点下移一行。 路线 - 路线。可在此处保存或加载路线。 设置 - 设置。
如何添加航点? 引用自Dzheo:添加航点需按下【Add Waypoint】,然后用鼠标左键点击漫游车要前往的位置。可以在地图模式或普通模式下选择位置! 漫游车航点 - 设置

引用自Dzheo:在Rover Autopilot中有一个航点帮助选项卡。那里有很多信息,但无法全部放在Rover Autopilot的一个部分中。因此,接下来的两个部分专门用于航点帮助。 Rover Autopilot - 航点帮助1 第一部分介绍Rover Autopilot中的功能说明和参数设置。
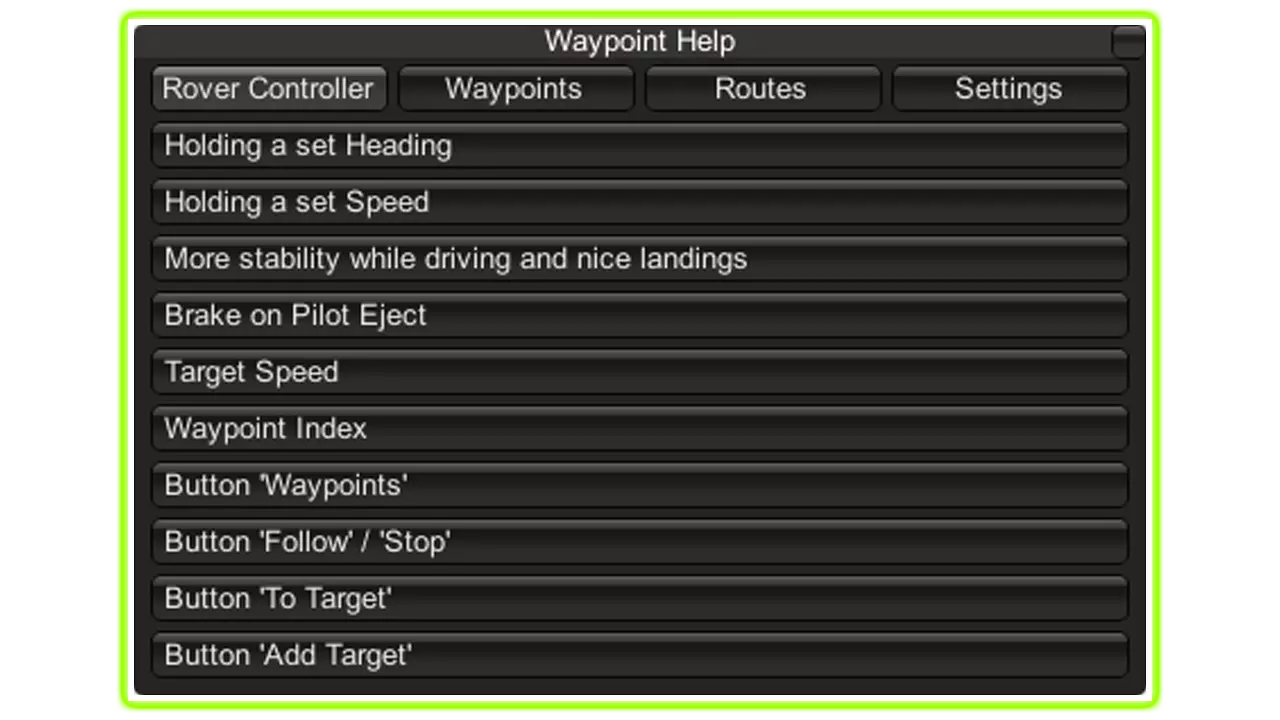
航点帮助 - 航点助手 选择“帮助”后,你将进入航点帮助窗口。这里有四个标签页:漫游者控制器、航点、路线和设置。其中包含大量信息、功能操作说明及其他指南。
漫游者控制器 - 漫游者控制
保持航向 - 航向保持。 要保持特定航向,只需在航向控制(Heading Control)选项旁打勾,自动驾驶仪就会尝试按设定的航向行驶。当自动驾驶仪需要前往航点时,也必须开启航向控制(Heading Control)。 航向误差(Heading Error)仅显示当前航向与目标航向之间的偏差。
保持设定速度 - 维持指定速度。 要保持特定速度,只需在【速度控制】旁打勾,自动驾驶就会以输入的速度行驶。当自动驾驶需要按航点行驶时,也必须开启【速度控制】。 【速度误差】仅显示当前速度与目标速度之间的误差。
驾驶时更稳定,着陆更平稳 - 提升稳定性和着陆效果。 如果开启稳定控制,自动驾驶将使用陀螺仪来保持越野车的平稳姿态。这意味着当您进行跳跃时,自动驾驶会尝试尽可能调整越野车姿态,以实现最平稳的着陆。请注意,这并不会让您的越野车变得坚不可摧。稳定性控制还会降低刹车力度,以减少因刹车力度过大而导致的翻转可能性。可通过进入设置以及牵引力和刹车界面来调节此参数。该设置也会针对每艘船单独保存。
飞行员弹射制动 - 当飞行员离开载具时制动。 如果启用此参数,当飞行员离开驾驶位时,漫游车将停止。 仅在有人驾驶的漫游车上生效。
目标速度 - 目标速度。 自动驾驶试图达到的速度。
航点索引 - 航点索引。 当前激活的航点列表以及自动驾驶当前前往的航点编号。
【路径点】按钮 - 路径点设置按钮。打开路径点列表以设置路线。
【跟随/停止】按钮 - 该按钮用于控制自动驾驶功能。此参数允许自动驾驶沿设定路线行驶,从路线的第一个点开始。仅当至少设置了一个航点时,该参数才会显示。按住Alt键并点击航点可更改自动驾驶的行驶顺序。如果唯一的航点是目标点,自动驾驶将跟随该目标,而不仅仅是单次接近它。如果自动驾驶已激活,跟随按钮将切换为停止按钮,按下该按钮显然会停止自动驾驶。
【前往目标】按钮 - 功能为“移动至目标”。该按钮会立即清空航点列表,将目标设为唯一航点并启动自动驾驶。此参数仅在已选择目标时可见。按住Alt键并点击航点,可将自动驾驶设为“循环模式”,使自动驾驶持续跟随目标,到达后在目标附近停留,而非自动关闭。
【添加目标】按钮:将所选目标添加为航点,可添加至路线末尾或所选航点之前。该参数仅在已选择目标时可见。
路径点(Waypoints)
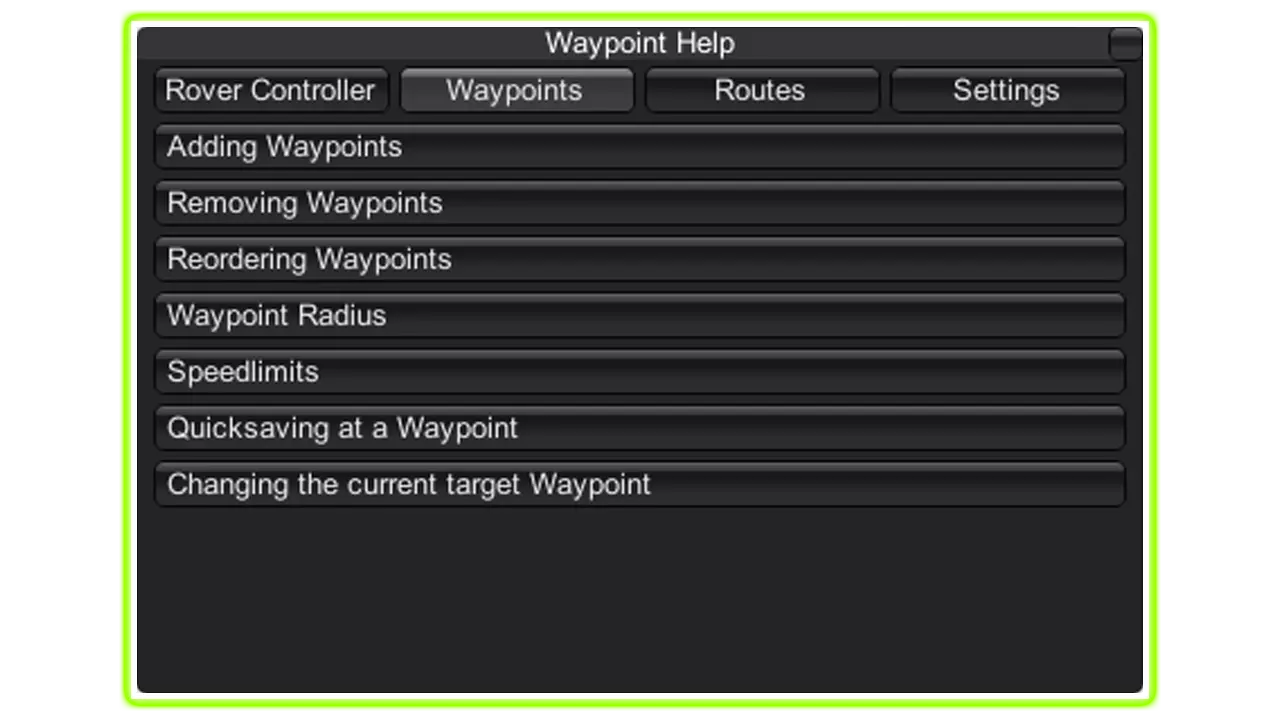
添加航点 - 添加路径点。 为路线添加新的路径点,可添加在末尾或当前所选路径点之前。只需点击地面或在地图模式下操作即可。按住Alt键点击路径点可重新规划路线,为方便构建路线链,在地图模式下按住Alt键的同时右键点击地形或目标。这样您就可以添加更多的点,而无需再次点击添加路径点按钮。
删除导航点 - 删除导航点。 删除当前选中的导航点,按住Alt键可删除所有导航点。
调整路径点顺序 - 更改路径点的顺序。 上移和下移按钮可将选中的路径点在列表中向上或向下移动一行,按住Alt键则可将其分别移至列表顶部或底部。
航点半径 - 航点的半径。 半径决定到达航点中心的距离,当到达该距离后,航点将被视为已到达。5米半径(默认值)表示当您距离航点5米时,自动驾驶将切换到下一个航点,或者如果是最后一个航点则关闭。文本框后的【A】按钮可将输入的半径应用于所有航点。
速度限制 - 速度限制。 两个速度文本框分别代表航点的最小速度和最大速度。最大速度是自动驾驶为到达航点而尝试达到的速度。以前,最小速度用于设置自动驾驶通过航点时的速度,但现在这一功能已被重新设计。我不知道她现在在做什么。最好还是保持默认值。【A】键为所有航点设置相应的速度。
在路径点快速保存 - 在路径点快速保存。 按下“QS”按钮可为此路径点启用“快速保存”功能。这将使自动驾驶停止并尝试在该点执行快速保存,然后继续行驶。启用“快速保存”的路径点文本会显示为黄色而非白色。按住Alt键点击“快速保存”,将切换所有路径点(包括所选路径点)的“快速保存”状态。
更改当前目标航点 - 更改当前目标航点。 点击航点可将其标记为当前目标航点。激活的航点会显示绿色背景。 漫游者自动驾驶 - 航点帮助2 漫游者自动驾驶功能和参数工作说明的第二部分。
衯线
路线帮助 - 路线说明。 空白文本框用于保存路线,保存前请输入名称。若要加载路线,只需在列表中选择并点击“加载”。 若要删除路线,只需选择该路线,“删除”按钮将出现在其右侧。
莞罎
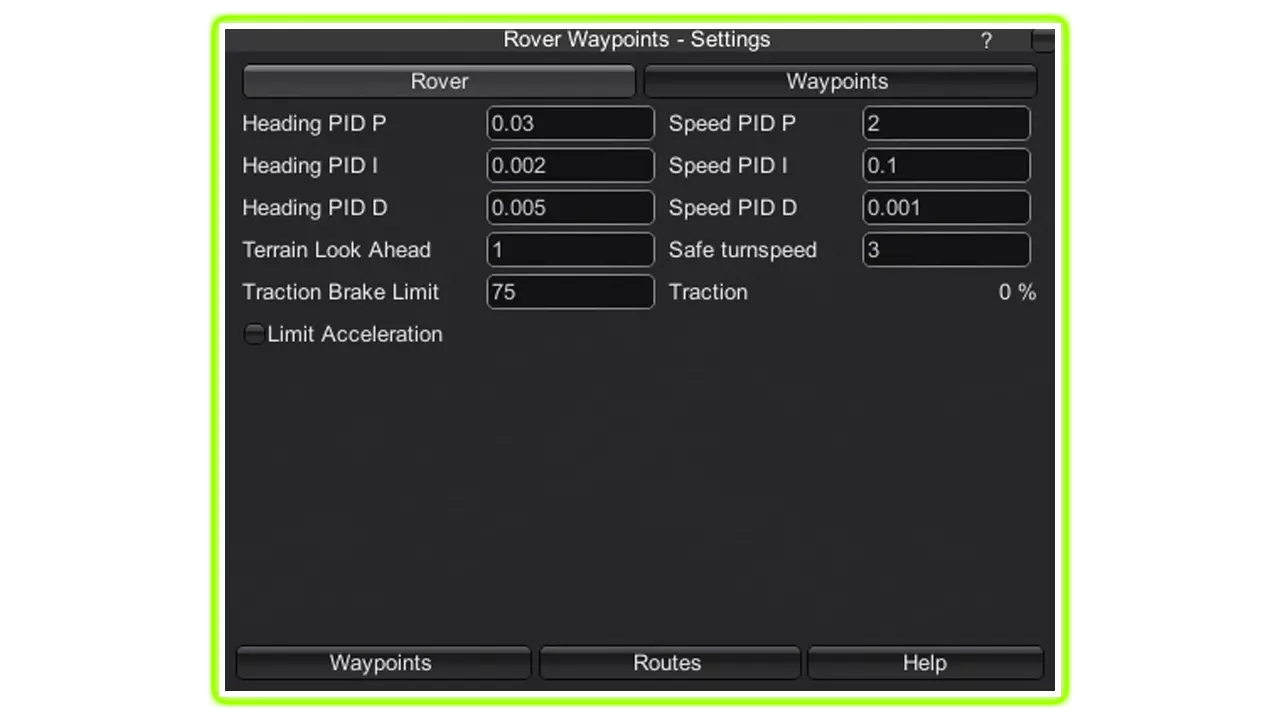
航向/速度PID - 航向/速度PID控制器。 这些参数用于控制航向/速度PID的运行方式。参数的更改会全局保存,因此没有相关经验的话请勿修改。或者,至少请记录下默认数值,以便在操作混乱时能够恢复。
安全转向速度 - 安全速度。 安全转向速度用于告知自动驾驶系统,漫游车可以以何种速度通过弯道而不会发生侧翻。考虑到地形可能存在的起伏以及其他因素,您可以直接使用默认值,但如果您急于尝试或想要进行实验,不妨大胆测试。该设置会针对每种类型的载具单独保存,同类型载具将共享相同的设置。
牵引力与制动 - 牵引力和刹车。 刹车牵引力以百分比显示,代表有多少车轮与地面接触。牵引力刹车极限决定了需要多大的牵引力,自动驾驶才会启用刹车(如果稳定控制系统已开启),即使你正在踩刹车。这意味着在默认设置下,只有当至少三个车轮与地面接触时,才会使用75%的刹车牵引力。每种船舶类型的牵引制动极限保持不变。
在地图视图中更改路线高度 这些数值决定了地图模式下路线高度的偏移量。考虑到其设置方式较为特殊,可能会出现过高或过低的情况,因此添加了这些设置以便于调整。这些设置应该是全局保存的。 脚本模块 脚本模块可以完全自动化模块的运行流程和启动顺序。创建的脚本可以保存并在后续使用。
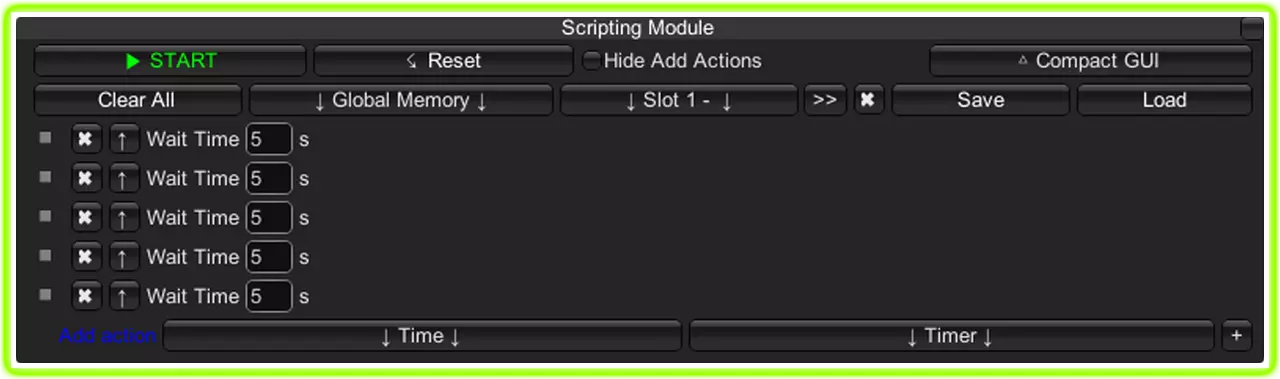
第一行 - 场景总控 Start - 启动场景 Reset - 重置场景 Hide Add Action - 显示/隐藏“添加动作”区域 Compact GUI - 紧凑窗口模式
第二行 - 场景全局管理 清除全部 - 清除所有 全局内存 - 全局内存 舰船内存 - 舰船内存 插槽 - 插槽 箭头 - 添加插槽名称 叉号 - 清除插槽 保存 - 保存更改 加载 - 加载插槽
添加动作 - 添加操作 共有12个组,其中包含33个操作,通过这些操作可以选择对接端口、切换到另一枚火箭、分离级段或启动发动机。 脚本模块还可以运行自动驾驶、对接或着陆模块。 脚本模块 - 添加动作
时间 - 时间 计时器 - 计时器。设置计时器,计时结束后将启动下一个操作。 暂停 - 暂停。将脚本执行暂停。点击GO按钮继续。 等待至 - 等待至指定时刻。 高度 - 高度。 速度 - 速度。 到目标的距离 - 到目标的距离。 目标远地点 - 目标远地点。 目标近地点 - 目标近地点。 目标最近接近时间 - 目标最近接近时间。 目标最近接近距离 - 目标最近接近距离。目标相对速度 - 目标相对速度。 目标倾角 - 目标倾角。 目标轨道周期 - 目标轨道周期。 目标轨道速度 - 目标轨道速度。 目标到达远地点时间 - 目标到达远地点时间。 目标到达近地点时间 - 目标到达近地点时间。 Target LAN - ??? Target AoP - ??? 目标偏心率 - 目标偏心率。 Target SMA - ??? 目标球体引力范围内的近地点 - ??? 与目标的相位角 - 与目标的相位角。 目标行星相位角 - 目标行星相位角。 相对倾角 - 相对倾角。Time to AN - ??? Time to DN - ??? Time To aquatonal AN - ??? Time To aquatonal DN - ??? Circular Orbit Speed - 轨道环绕速度 Apospeis - 远心点 Periapsis - 近心点。影响动作执行条件的参数。 Smaller Than - 小于 Equal To - 等于 Greater Than - 大于 Between - 介于之间 Warp - 加速至 Periapsis - 近心点 Apoapsis - 远心点 Maneuver Node - 机动节点 Sol Transition - 开始进入行星或卫星引力区 Time - 时间 Phase Angle - 相位角 Suicide Burn - Suicide Burn Distance大气进入(Atmospheric Entry)。提前量(Lead Time):在到达目标前多久停止加速。
对接 - 对接 分离 - 分离对接端口。 选择您设备上的对接端口。眼睛图标会高亮显示端口。 对接护盾 - 打开或关闭屏蔽对接端口的护盾。 目标对接端口 - 目标对接端口。 第一个对接端口将作为目标,第二个端口被选为【从此处控制】。
目标 - 目标 目标对接端口 - 目标对接端口。 第一个对接端口将作为目标,第二个端口选择为【从此处控制】。 目标天体 - 设置目标,天体。 太阳 - 太阳。 Kerbin - 坎巴拉。 Mun - Mun(月球)。 Minmus - Minmus(迷你卫星)。 Moho - 莫霍。 Eve - 伊芙。 Duna - 杜纳。 Ike - 艾克。 Jool - 朱诺。 Laythe - 莱特。 Vall - 瓦尔。 Bop - 波普。 Tylo - 泰洛。 Gilly - 吉利。 Pol - 波尔。 Dres - 德雷斯。 Ealoo - 伊卢。
控制 - 控制 控制来源 - 从所选指挥舱进行控制。 RCS - 反应控制系统(Reaction Control System)。 RCS - 开启、关闭RCS。 RCS节流阀(引擎离线时) - 使用RCS引擎进行移动。 使用RCS进行旋转 - 使用RCS引擎进行旋转。 零相对速度 - 你相对于目标的速度将为零。 SAS - 开启或关闭自动稳定系统。 切换飞船 - 切换控制的飞船。
船员 - 乘员组 选择宇航员并将其从一个模块转移到另一个模块。 启用的眼睛图标会高亮显示选定的模块。
轨迹 - 轨道机动 - 机动规划器。所有参数的用途和说明请查看机动规划器部分。执行节点 - 执行机动节点。下一个节点 - 仅执行下一个机动节点。所有节点 - 执行所有节点。自动跃迁 - 时间自动加速。
分级/引擎 - 分级/发动机 分级 - 激活分级。激活下一级或选择分级编号。
启动引擎 - 激活发动机。 选择需要启动的发动机。眼睛图标会高亮显示发动机。
设置 - Настройки 容差 - Допустимое отклонение 前置时间 - Время выполнения
模块 - 智能自动稳定系统(Smart A.S.S.)模块 上升自动驾驶 - 自动驾驶 对接自动驾驶 - 对接 着陆 - 着陆 会合 - 简单会合 会合自动驾驶 - 目标会合 模块的说明和用途,请查看各部分内容。 添加模块前,需点击眼睛图标进行设置。
保存/加载/操作 - 保存/加载/操作 快速保存 - 游戏快速保存。 加载脚本 - 从槽位加载已保存的脚本。 操作组 - 操作组。 紧急中止 - 紧急操作组。 刹车 - 刹车。 自定义01 - 从01到09。操作组,在机库中分配。 起落架 - 起落架,底盘。 灯光 - 灯光。 无 - 无。 RCS - 反作用控制系统(RCS)。 SAS - 自动稳定系统(SAS)。 级间分离 - 级。
程序逻辑 - PROGRAM Logic 重复 - Repeat 如果 - If 当 - While 并行 - Parallel 等待 - Wait For
插件 - 插件 脚本模块 - 脚本示例 脚本执行以下操作:运载火箭起飞,进入75公里轨道,释放卫星,启动卫星发动机,运载火箭脱离轨道,降落在飞行控制中心附近,快速保存。
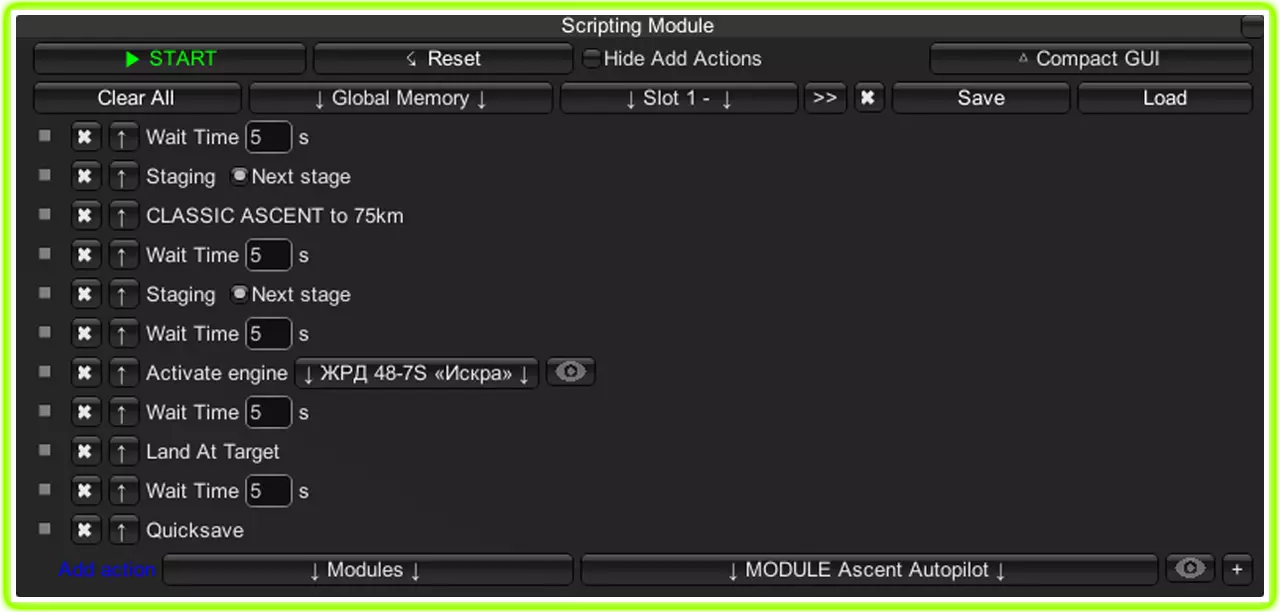
1. 等待5秒。 2. 启动下一阶段。(下一阶段,运载火箭发动机) 3. 启动Ascent Guidance模块,进入75公里轨道。 4. 等待5秒。 5. 启动下一阶段。(卫星与运载火箭分离) 6. 等待5秒。 7. 启动发动机。(启动分离卫星的发动机) 8. 等待5秒。 9. 启动Landing Guidance模块,自动着陆。 10. 等待5秒。11 - 快速保存
在这些操作之间,我添加了5秒的等待时间,这样会更清晰。 步骤3的【Ascent Guidance】功能需要在火箭发动机启动后才会开始工作,因此需要先执行步骤2,启动带有发动机和发射架的级段。 这种情况下可以使用并行操作(Parallel),在其中可以同时指定两个操作,但为了直观和简化流程,我没有采用这种方式。设置 - MechJeb 通用设置 设置窗口中包含 MechJeb 的通用设置。
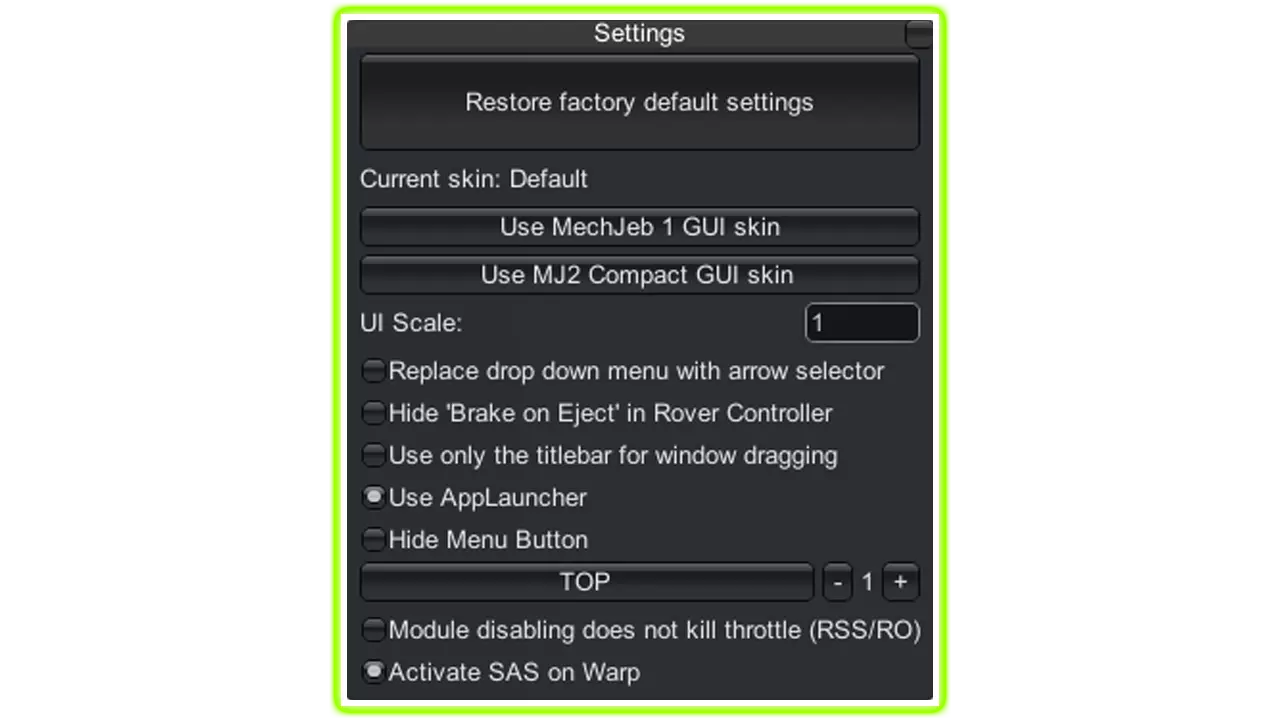
恢复出厂设置 - 重置MechJeb的所有设置。 当前皮肤 - 更改MechJeb窗口的整体外观。 界面缩放 - 更改MechJeb窗口的缩放比例。 用箭头选择器替换下拉菜单 - 用箭头替换弹出窗口。 在漫游车控制器中隐藏“弹射时刹车” - 显示“弹射时刹车”参数。 此参数会在 Kerbal 离开驾驶座时启用载具的刹车。
仅通过标题栏拖动窗口 - 拖动窗口时仅可通过窗口标题栏进行操作。 仅使用窗口标题栏在屏幕上移动窗口。
使用应用启动器 - 打开机械杰布(MechJeb)弹窗 隐藏菜单按钮 - 隐藏机械杰布(MechJeb)按钮
模块禁用不会终止节流(RSS/RO)- 失去连接时不重置推力。 当与模块失去连接时,节流阀不会关闭。
在曲速状态下激活SAS - 在时间加速时使用SAS。 Smart A.S.S. - 智能稳定系统 智能稳定系统(Smart A.S.S.)可像飞船自动稳定系统一样稳定飞船,但具备更广泛的功能。智能稳定系统的功能对于没有自动稳定系统的模块会很有用。

Off - 关闭稳定系统。 Kill Rot - 消除(任何)旋转。默认SAS中为波浪号~图标。 Node - 以机动节点为目标。 Mode - 稳定系统工作模式。 共有四种模式:OBT、SURF、TGT、ADV。 下面依次介绍每种模式。
OBT - 轨道专业级(ОрбитаPRO GRAD)- 顺向。 RETR GRAD - 逆向。 NML + 法线。 NML - 反法线。 RAD + 径向向外。 RAD - 径向向内。 Force Roll - 保持倾斜。
冲浪 - 表面
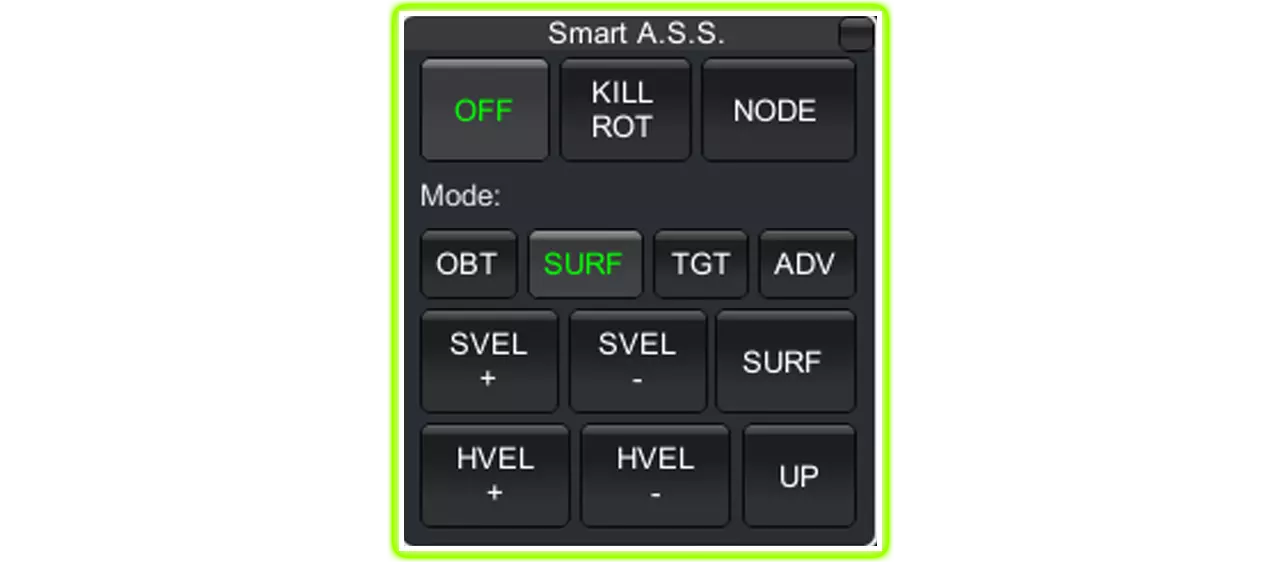
SVEL + 表面速度 - 沿相对表面的速度矢量方向。攻角=0° SVEL - 表面速度 - 逆相对表面的速度矢量方向。攻角=180° HVEL + 水平速度 - 沿SVEL矢量在水平轴上的投影方向。俯仰角=0° HVEL - 水平速度 - 逆SVEL矢量在水平轴上的投影方向。俯仰角=180° SURF - 设定任意角度,可通过按钮以1°为步长调整,或通过键盘输入。上仰 - 俯仰角=90°/垂直于地平线的方向/严格向上
目标(TGT)

要激活参数需选择目标。 TGT + 朝向目标方向。 TGT - 背向目标方向。 RVEL + 相对速度 - 沿相对目标的速度矢量方向。 RVEL - 相对速度 - 逆相对目标的速度矢量方向。 PAR + 与目标平行方向(正向)。 PAR - 与目标平行方向(负向)。 Force Roll - 相对目标的横滚。
高级驾驶辅助 - 自定义稳定系统 自定义稳定系统可使舰船保持相对选定目标的稳定状态。

参考 - 参考目标 惯性 - 惯性 轨道 - 轨道 水平轨道 - 水平轨道 地表北方 - 地表北方 地表速度 - 地表速度 目标 - 目标 相对速度 - 相对速度 目标朝向 - 目标朝向 机动节点 - 机动节点 太阳 - 太阳 地表水平 - 地表水平
方向 - 相对于所选目标的方向。 向前 向后 向上 向下 向右 向左
强制翻滚 - 相对目标的倾斜。 执行 - 应用设置。
如何应用? 引用自Dzheo:在【参考】选项卡中需要选择目标,假设目标是太阳。 【方向】选项卡负责飞船相对于所选目标的方向。 这样可以使太阳能电池板始终朝向太阳。 Smart RCS - 反作用控制系统引擎控制 Smart RCS是一个用于控制反作用控制系统引擎的小助手。
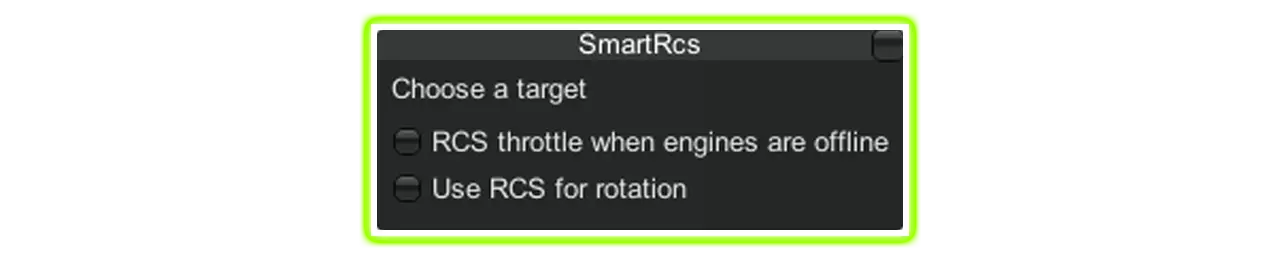
RCS油门(引擎离线时)- 使用RCS引擎进行移动。仅在火箭主引擎关闭或燃料耗尽时生效。 使用RCS进行旋转 - 使用RCS引擎进行旋转。
以下参数仅在选择目标后可用。
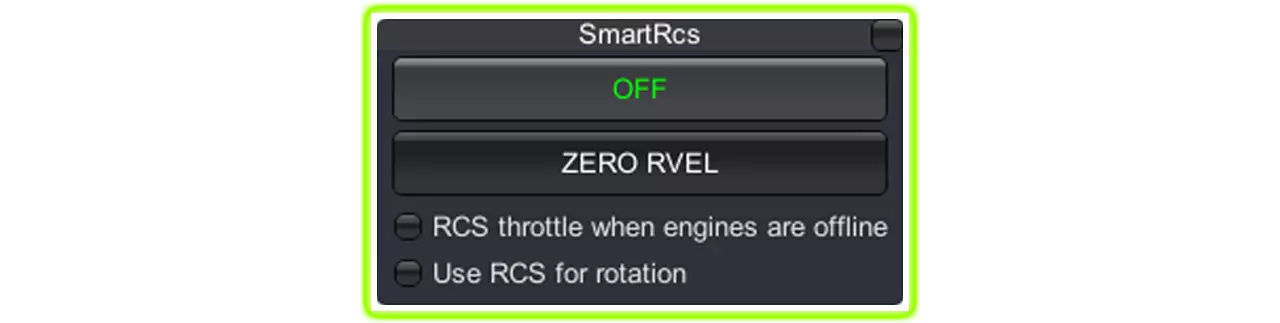
关闭 - 关闭零偏差。 零相对速度 - 你相对于目标的速度将为零。 设备会吸附在你激活此功能时的距离上。 Translatron - 引擎推力控制 Translatron模块控制节气门,并完全控制喷气发动机设备的下降或上升速度,还允许悬停在一个地方。仅可在垂直状态下使用。
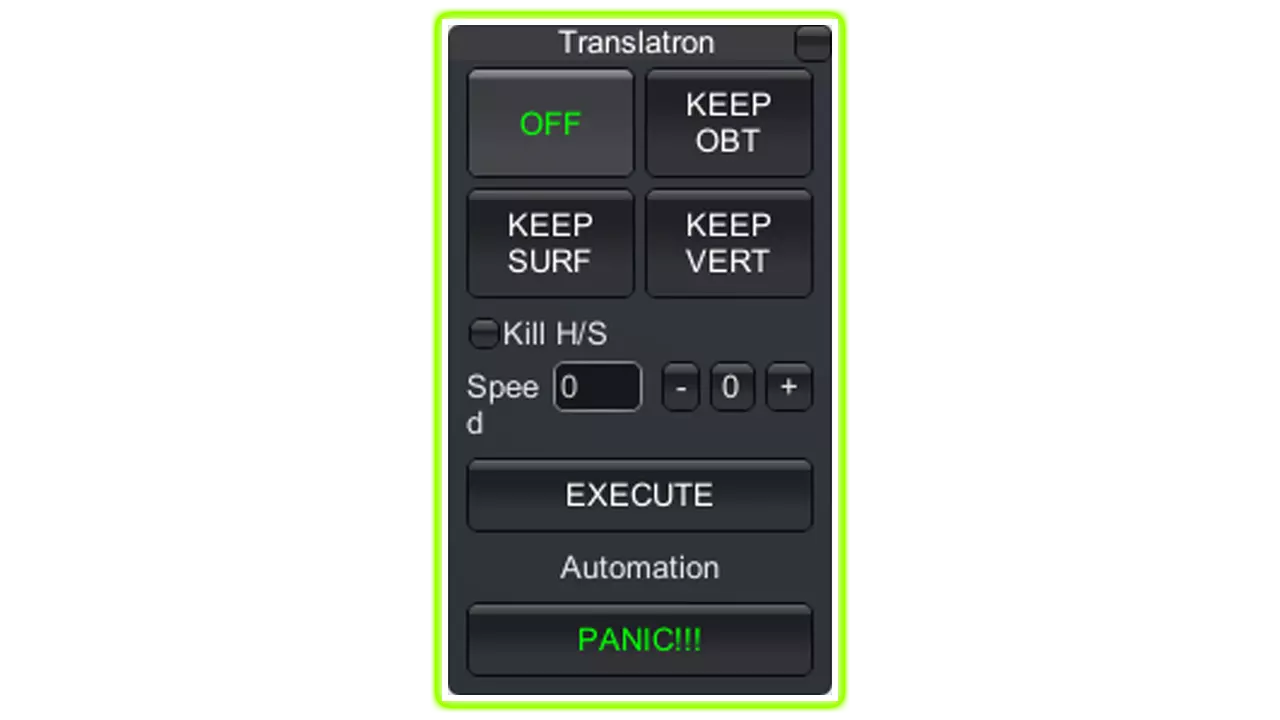
关闭 - 关闭翻译器。 保持轨道速度 - 保持轨道速度。 保持垂直速度 - 保持上升或下降的垂直速度。 保持表面速度 - 保持表面速度。 悬停/稳定控制 - 稳定控制,悬停在原地。 速度 - 高度增减速度。 执行 - 执行所选操作。 紧急!!! - 中断当前进程,激活100%发动机推力。 【紧急】按钮,在出现意外情况时激活。启动发动机全推力并稳定设备方向,随后激活着陆模式,释放着陆支架,执行着陆操作。 实用工具 - 辅助参数 在实用工具中可以展开或收起空间站上的所有太阳能电池板和天线。也可以设置太阳能电池板和天线在到达太空时自动展开。可以启用自动抛弃空火箭级并启动下一级发动机,同时您将继续保持对火箭的控制。
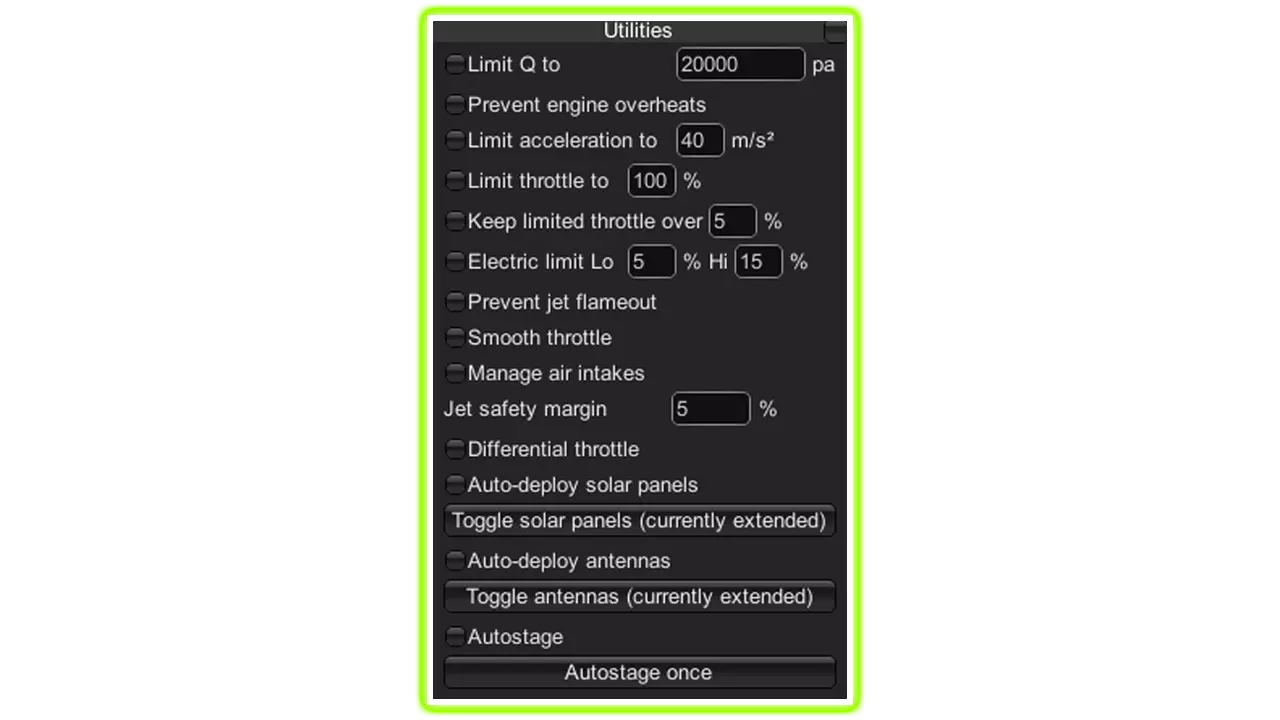
实用程序限制Q - 当超过指定压力时限制速度。 防止发动机过热 - 防止发动机过热。 限制加速度至 - 限制加速度至。 限制油门至 - 限制油门至。 保持限制油门超过 - 保持限制油门超过。 电力限制低 - 电力限制低。 防止喷气发动机熄火 - 防止喷气发动机熄火。 平滑油门 - 平滑油门。 管理进气口 - 管理进气口。喷射安全余量 - 射流安全余量 差动油门 - 差动引擎 自动展开太阳能电池板 - 自动展开太阳能电池板 切换太阳能电池板(当前已收起) - 切换太阳能电池板 自动展开天线 - 自动展开天线 切换天线(当前已收起) - 切换天线 自动级间分离 - 自动分离空燃料级 单次自动级间分离 - 单次分离空燃料级时间扭曲助手 - 智能时间加速 时间扭曲助手是一款时间加速辅助工具。可以快速且高精度地将时间快进到任意事件、地点或操作。
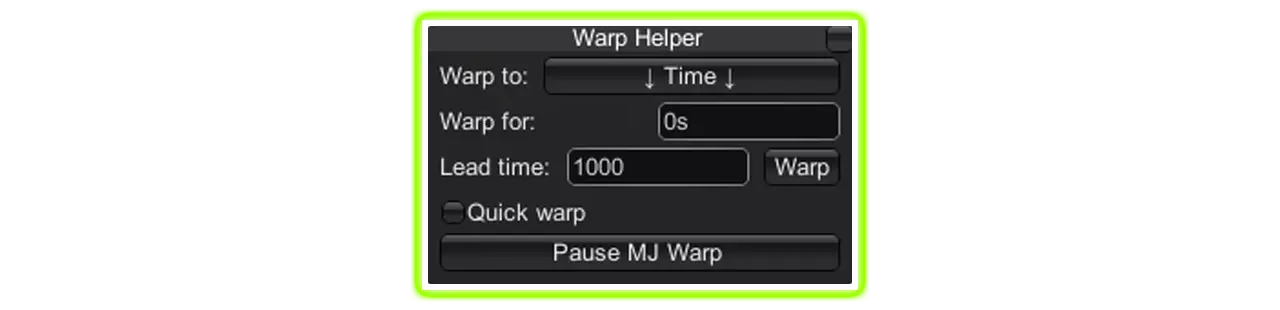
Warp To - 加速至。 此处选择时间将加速到的特定时刻或时间段。 Periapsis - 近心点。 Apoapsis - 远心点。 Maneuver Node - 机动节点。 Sol Transition - 开始进入行星或卫星引力区。 Time - 时间。 Phase Angle - 相位角。 Suicide Burn - 引擎以100%功率启动,同时保持推力矢量与相对于表面的速度矢量严格相反。若计算准确,开启时机应恰好使速度在接触表面时降至零。大气进入(Atmospheric Entry)
前置时间 - 执行时间。 曲速 - 激活加速。 快速曲速 - 启动快速加速。 暂停MJ曲速 - 暂停。 Delta-V统计 - 德尔塔-V(ΔV)统计 首先,Delta-V统计将在机库中派上用场,甚至在火箭建造阶段。 通过它,你可以了解火箭每个级别的推力装备情况、飞行距离、发动机在最大推力下的工作时间,以及每个级别和整个火箭的总重量。Delta-V Stats 有助于计算无大气层空间中的ΔV(德尔塔-维),以及所选行星特定高度大气层中的ΔV(德尔塔-维)。

级段 - 级段编号。 初始质量 - 级段含燃料的初始质量。 最终质量 - 级段不含燃料的最终质量。 级段质量 - 级段总重量。 燃烧质量 - 级段内燃料重量。 TWR - 推重比。 最大TWR - 最大推重比。 SLT - 海平面推重比。 最大SLT - 最大海平面推重比。 ISP - 比冲。 大气层ΔV - 大气层内ΔV。 真空ΔV - 真空环境ΔV。 时间 - 级段工作时间。轨道信息 - 轨道相关信息 当前航天器轨道的基本信息。
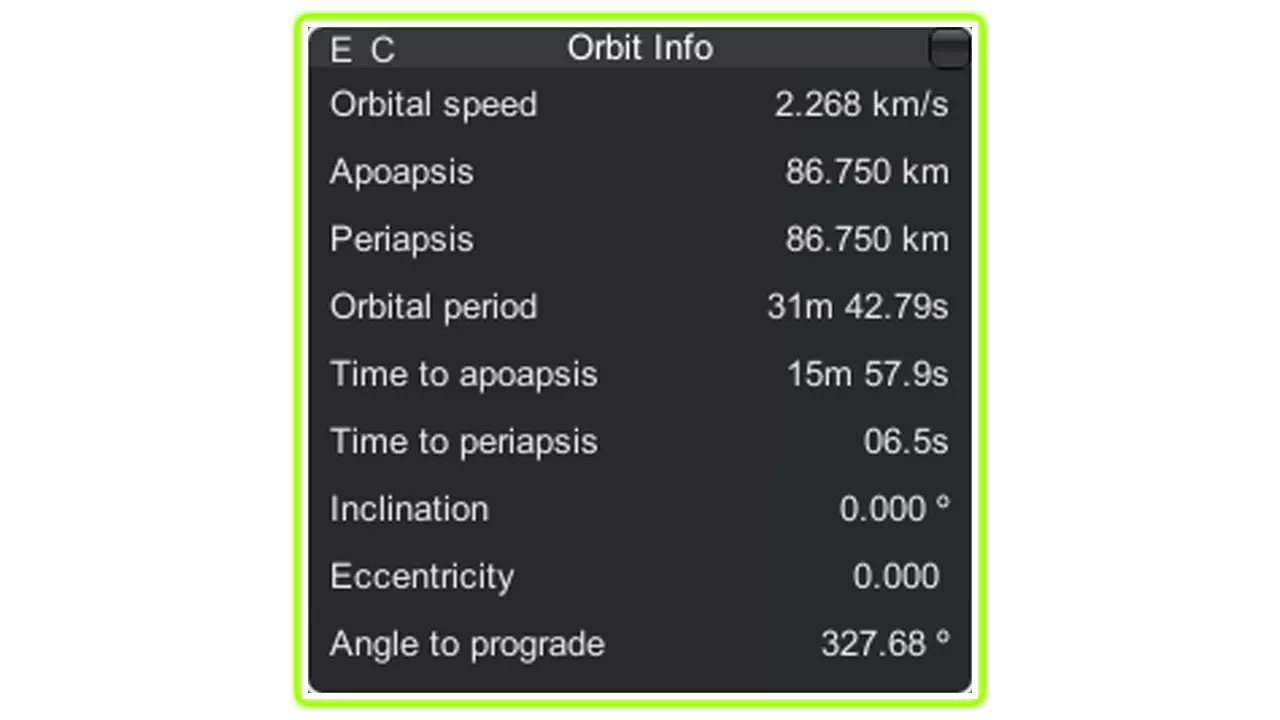
轨道速度 - 轨道速度 远地点 - 远心点 近地点 - 近心点 轨道周期 - 轨道周期 到远地点时间 - 到远心点时间 到近地点时间 - 到近心点时间 倾角 - 倾角 偏心率 - 偏心率 与顺行方向夹角 - 天体运动方向与飞船轨道位置的夹角 地表信息 - 表面数据 当前飞船正上方的表面信息
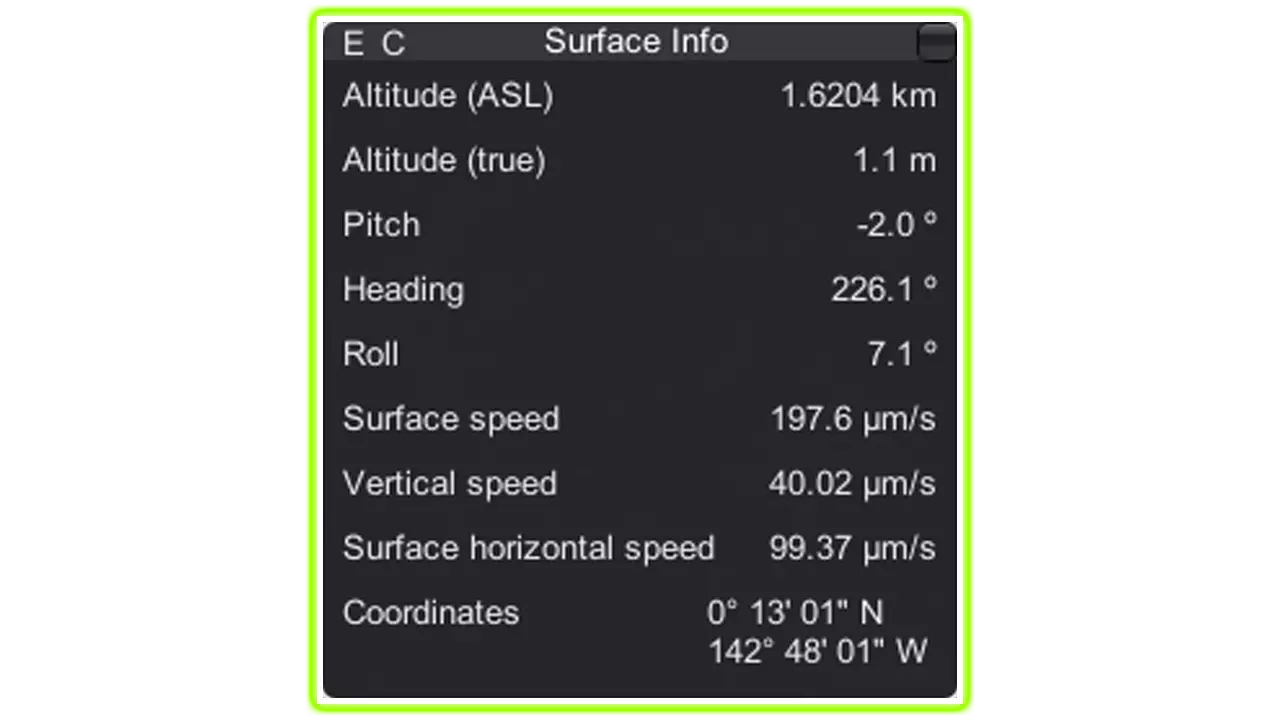
海拔高度(ASL)- 海拔高度。 真实高度 - 离地高度。 俯仰角 - 俯仰角。 航向 - 航向。 横滚角 - 横滚角。 地面速度 - 相对地面速度。 垂直速度 - 垂直速度。 地面水平速度 - 水平速度。 坐标 - 坐标。 船只信息 - 船只信息
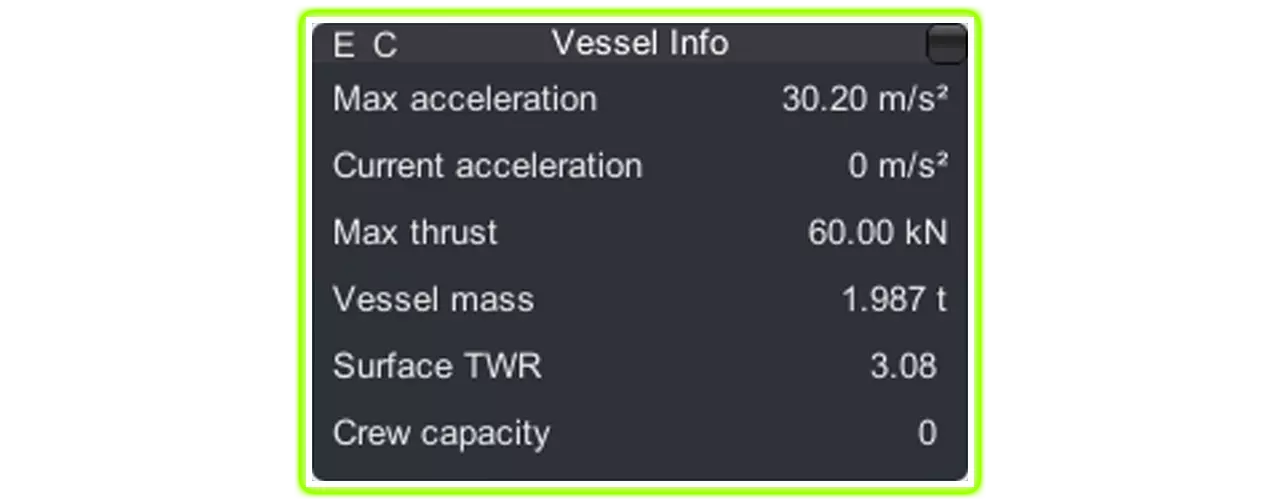
最大加速度 - 最大加速度。其数值会根据大气密度和火箭重量而变化。 当前加速度 - 当前设定推力。该数值由您控制。按Shift键增加发动机功率,按Ctrl键降低当前加速度。 最大推力 - 发动机的最大推力。您首先激活的那一级发动机的总推力。 航天器质量 - 总质量。 地面推重比 - 推重比。船员容量 - 船员座位数量
什么是TWR? 引用自Dzheo:TWR是推力重量比。即火箭或其级的推力重量比。 对于Kerbin来说,这个值不应低于1.00,否则火箭将无法起飞。 科学研究中心 在生涯模式中,MechJeb有固件,其模块不会立即全部可用,而是随着研究树的研究和跟踪中心的升级逐步解锁。此处说明了研究后将解锁哪个MechJeb模块以及研究所需的费用。
初始可用模块 飞行器自动驾驶仪 - 自动驾驶 飞行记录仪 - 飞行记录器 脚本模块 - 脚本模块 设置 - MechJeb通用设置 智能RCS - RCS引擎控制 Delta-V Stats - 德尔塔V统计 Orbit Info - 轨道信息 Surface Info - 表面数据 Vessel Info - 航天器信息
飞行控制 学习成本 - 45点科技值。 解锁内容: 自定义窗口编辑器 智能辅助稳定系统(Smart A.S.S.)
改进的操控 研究成本 - 90科技点。 解锁内容: Attitude Adjustment - 姿态调整。 RCS Balancer - 该模块无法使用。 Translatron - 引擎推力控制。 Utilities - 辅助参数。 Warp Helper - 智能时间加速。
为了进一步研究,需要升级科学研究中心。升级至二级的价格:451,000 credits。
野外研究 研究成本 - 300科技值。 解锁内容: 漫游车自动驾驶系统【Rover Autopilot】
无人机技术 研究成本 - 300科技值。 解锁内容: Aircraft Approach & Autoland - 飞机着陆 Ascent Guidance - 轨道进入引导
为了进一步研究,需要升级科学研究中心。升级至三级的价格:1,690,000 credits。
改进型无人机 研究成本 - 550科技点。 解锁内容: 停靠自动驾驶仪 - 对接。
升级后的监控中心 要解锁这些模块,需要将监控中心升级到二级。 升级费用为150,000信用点。 解锁后将获得: 着陆引导 机动节点编辑器 机动规划器 自动对接导航 目标对接规划