换一换
换一换 




这是一份适用于《微软模拟飞行》(2020)中ASOBO 787-10梦想客机的完整操作指南。本指南基于我在模拟飞行中驾驶该机型的观察编写,可能无法完全反映现实中该机型的实际操作流程。内容旨在详细说明从离港到进港的完美飞行步骤。 本指南目前仍在编写中,我会根据所学知识和反馈持续更新。现已完成从飞行计划到下降阶段的内容,ILS进近至着陆部分正在编写中。 欢迎在评论区提出任何问题,或建议希望纳入指南的额外内容,我将尽力提供帮助。 简介

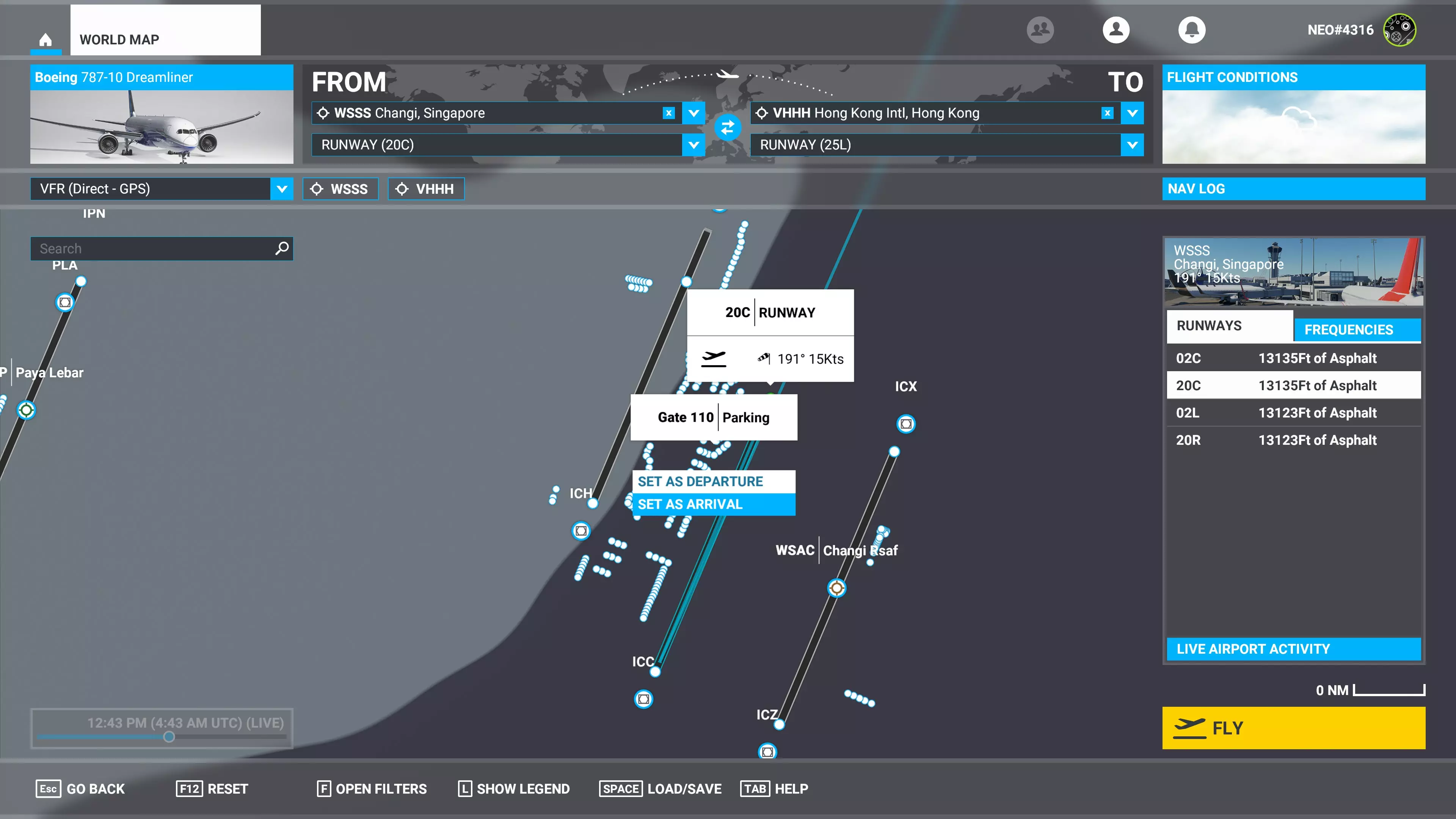
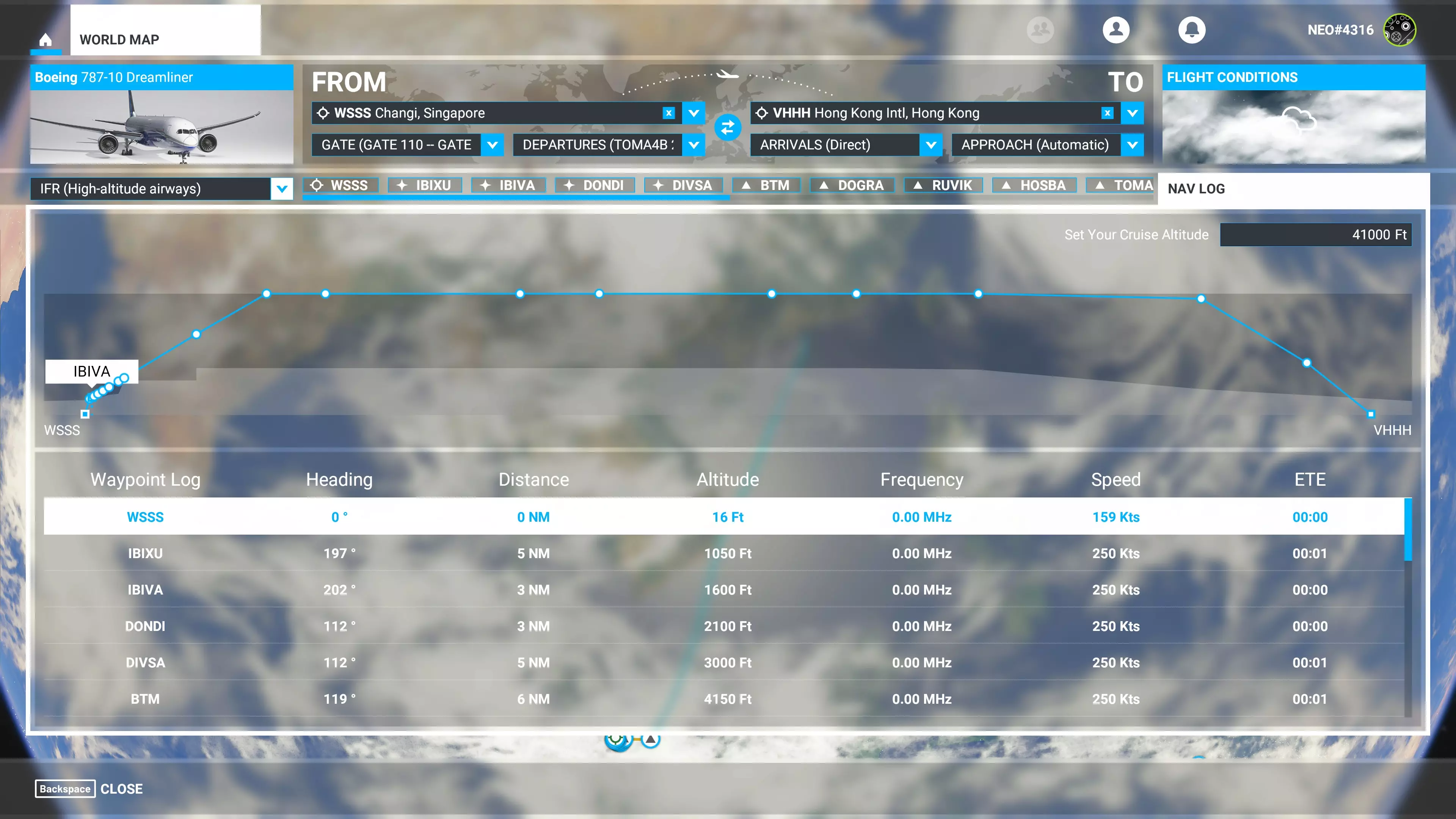
大家好,我制作本指南是为了帮助新手了解如何使用自动驾驶和ILS着陆来执飞波音787-10梦想客机的完整IFR飞行计划。 我注意到很多人在使用自动驾驶时遇到了各种bug和问题。虽然自动驾驶的某些部分确实存在bug,但在通过大量实验、尝试不同方法并实际操作以解决问题后,我深入了解了787自动驾驶的工作原理,从而成功避免了这些问题。因此,我希望本指南能帮助所有在实现从一个机场到另一个机场的完美飞行过程中遇到困难的人。 请注意,本指南可能无法反映787在现实世界中的实际操作,因此可能与真实情况存在一些差异。本指南基于我驾驶飞机的观察和经验,适用于飞行模拟器中波音787的操作。 但首先,让我们熟悉本指南中使用的术语,以便更好地理解它们。这将帮助你理解本指南中使用的所有航空术语。 主飞行显示器(PFD):显示飞机相对于地平线的姿态,以及高度、空速和任何激活或预位的自动驾驶模式的屏幕。 飞行管理系统(FMS):一种专门的计算机系统,可自动执行多种飞行中任务,例如通过导航航线和进近程序设置飞行计划。模式控制面板(MCP):位于前部遮光板上的面板,允许飞行员控制航向、高度和自动驾驶模式。 自动驾驶(A/P):整体飞行系统,允许飞机计算机控制飞机并根据飞行员输入的参数进行飞行。 自动油门(A/T):自动驾驶系统的子组件,控制发动机油门,根据需要提供更多或更少的动力。 垂直导航(VNAV):自动驾驶系统的子组件,控制飞机的俯仰姿态,同时管理飞机的高度以及爬升或下降过程。 横向导航(LNAV):自动驾驶系统的子组件,控制飞机相对于地球基本罗盘方向的航向。它还能让你的飞机保持在前往目的地的航线上。 仪表着陆系统(ILS):一种通过从跑道末端向下发送无线电波来工作的系统,截获该信号的飞机会利用无线电波引导其降落到跑道上。 航向信标(LOC):ILS的子组件,提供横向引导,帮助飞机以正确的航向对准跑道。 下滑道(G/S):ILS的子组件,提供垂直引导,帮助飞机以正确的角度下降到跑道上。 标准终端进场航线(STAR):仪表飞行规则(IFR)飞行计划中的飞机在抵达目的地机场前遵循的已公布飞行程序。辅助动力装置(APU):位于飞机后部的小型发动机,为飞机电子设备运行和客舱空调系统提供电力。当主发动机关闭时使用APU,只有当主发动机启动并为飞机提供必要电力后,APU才会关闭。 空中交通管制(ATC):负责管控地面和空中交通的人员。他们为你分配航向、高度和指令,确保飞行正常,并提供飞往目的地所需的必要信息。 应答机/应答代码(XPDR):飞机广播的特殊识别号码,使空中交通管制能够识别你的身份以及飞机类型。准备飞行计划 选择出发和到达机场 在此示例中,我们可以选择WSSS - 新加坡樟宜国际机场作为出发地,VHHH - 香港国际机场作为目的地。


冷舱启动说明:默认起始点为跑道。若要改为冷舱启动,需放大至出发机场并选择实际起始登机口,同时选择到达机场,以便目的地地面管制为你分配前往正确登机口的滑行路线(这是为了避免地面管制将你的787分配到远处角落的通用航空停机坪)。 注意:787最适合停靠中型或重型登机口。其翼展过大,无法停靠小型登机口。因此选择机场时请牢记这一点。
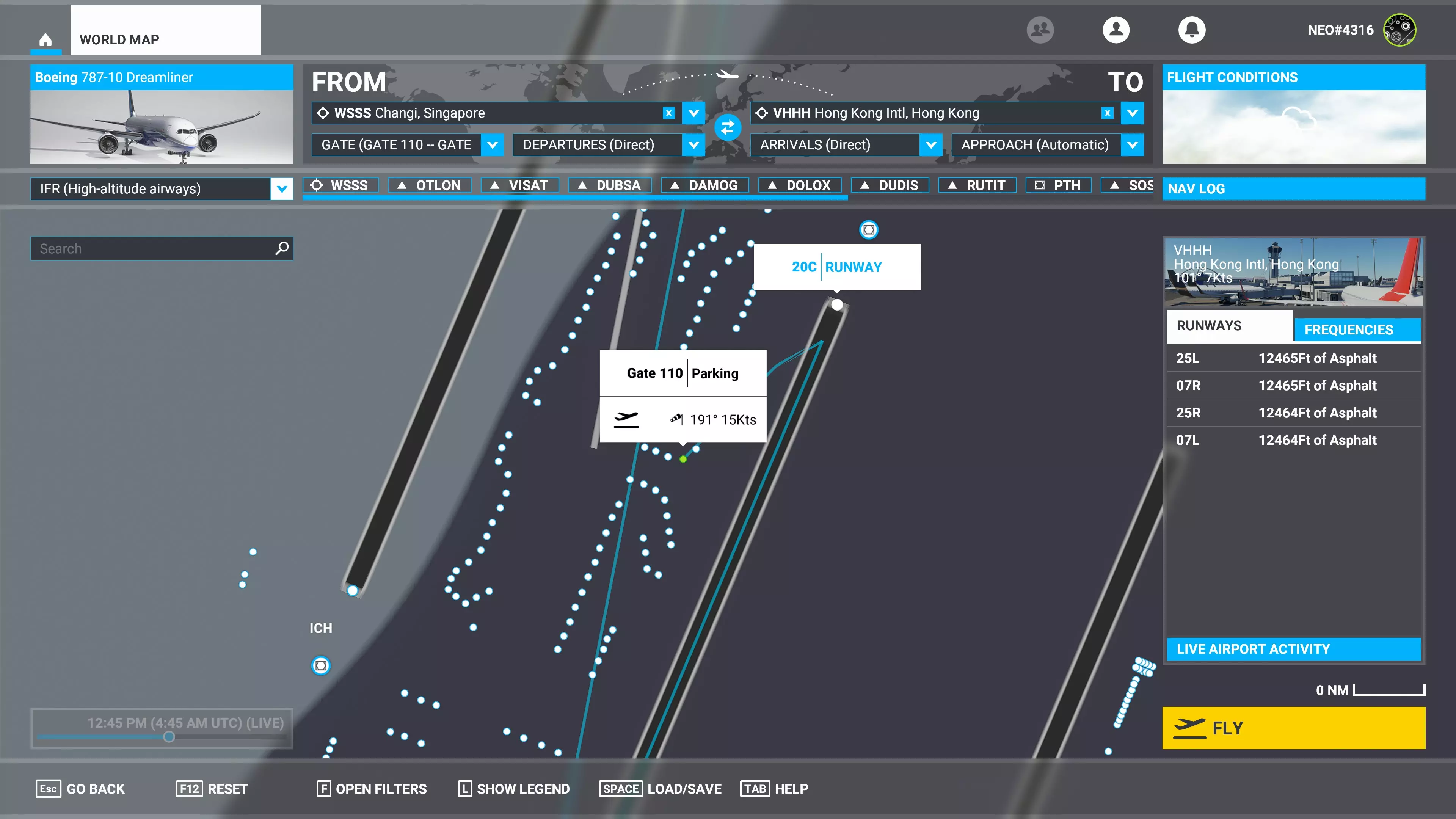
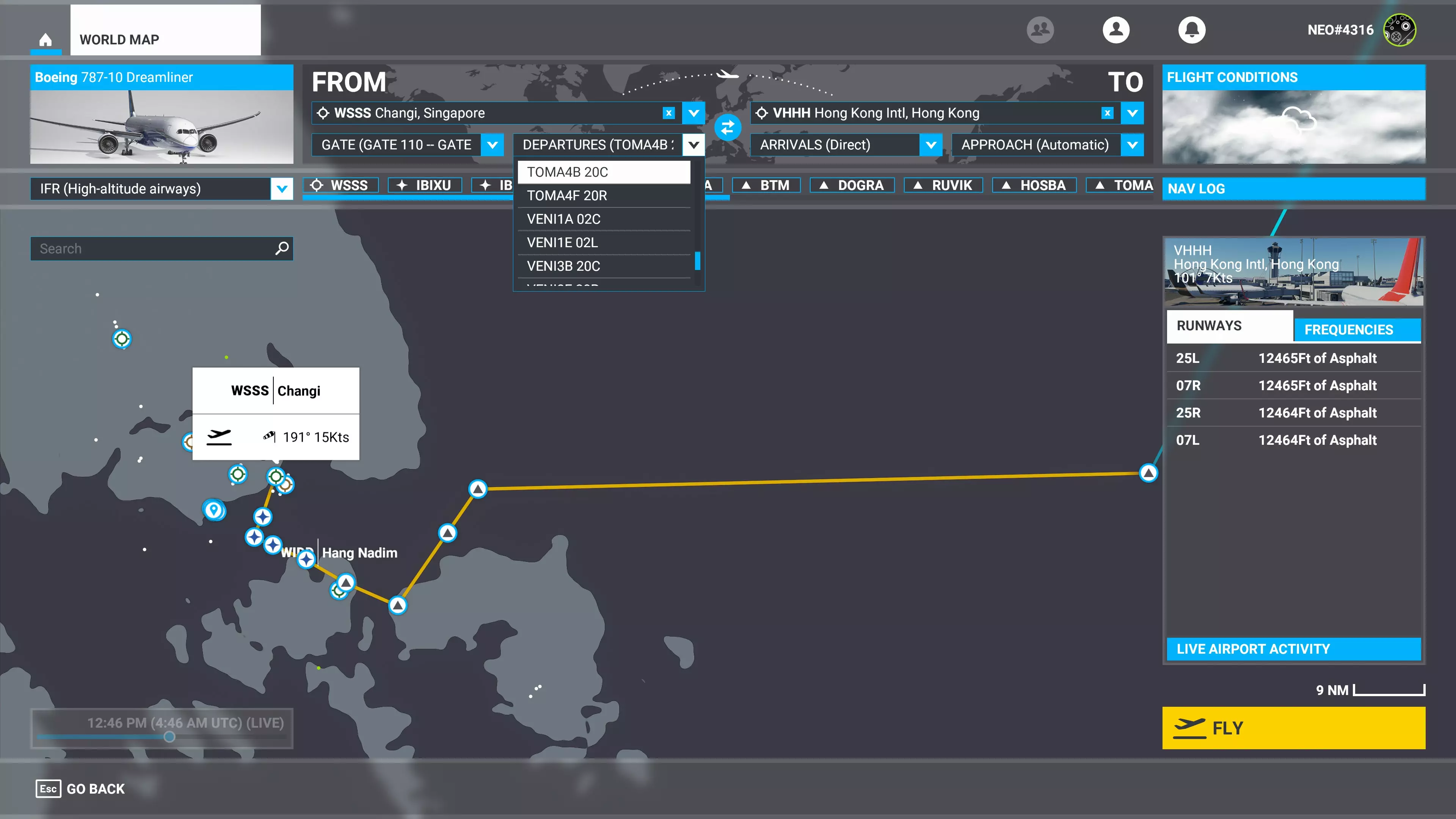
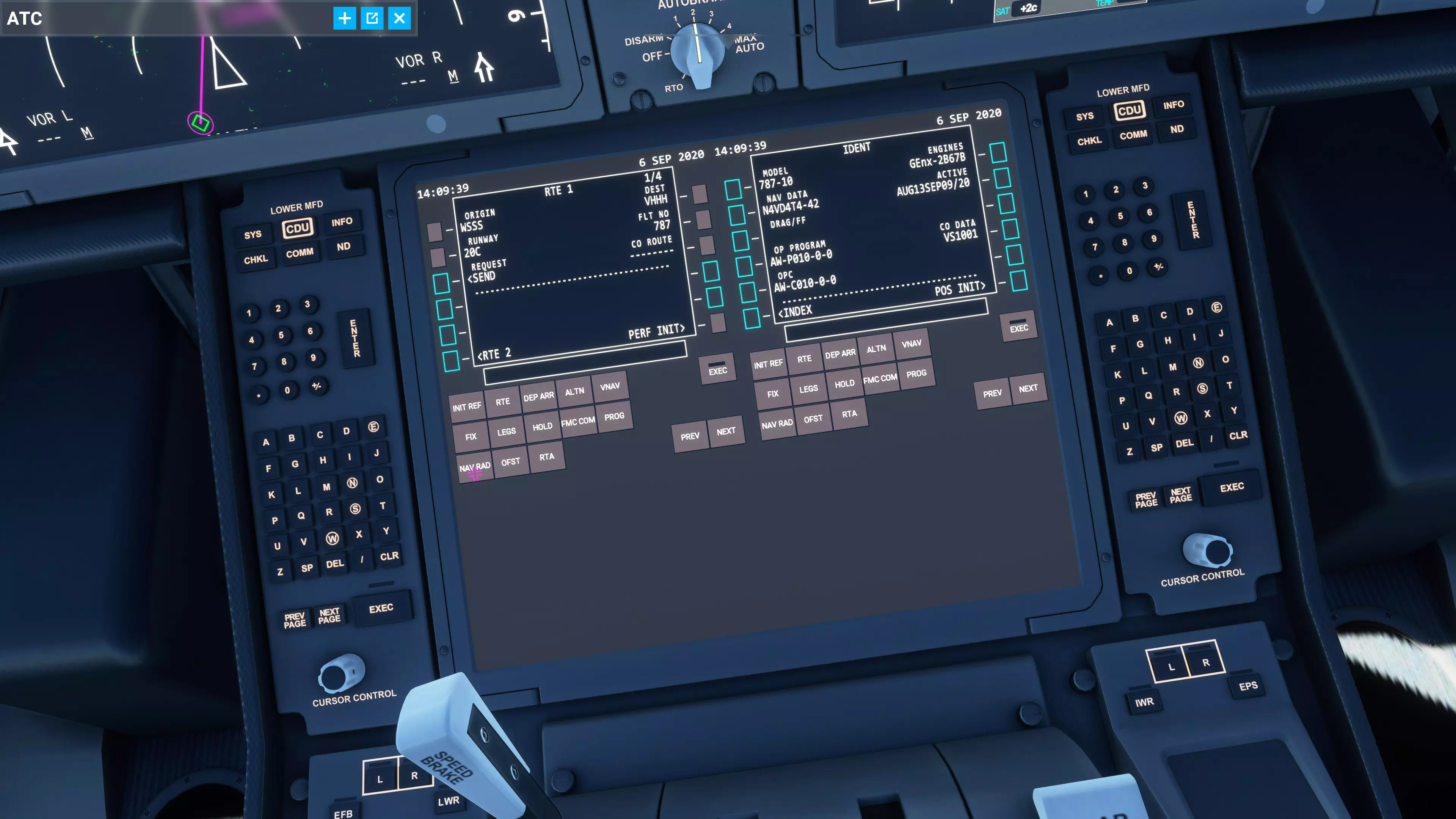
选择离场模式。离场模式是所有离场飞机必须遵循的交通路径,以确保机场空域内交通顺畅。每条离场模式都分配给一条跑道,并规划从该跑道到机场外多个点的路径。 需要离场模式来确保你的飞行计划从指定跑道的起飞点正确规划。默认情况下,有时会被指定为“直接”模式,有时则已分配离场模式。如果是后者,你可以保持不变,或选择其他模式。 放大你的离场机场,注意初始飞行计划的路线,例如在下方示例中,从登机口出发,路径将带你前往20C号跑道。这就是你的指定跑道。模拟程序会根据风向等天气条件及其他因素为你分配活动跑道。活动跑道通常为逆风跑道,以确保起飞时无需达到过高地速即可升空,同时着陆时能为飞机提供足够阻力,使其在接地后更快停下。 从下拉列表中选择离场航线模式,挑选名称中包含你所分配跑道(本示例为20C跑道)的模式,并选择离场航线中朝向目的地的最优方向。选择正确的模式将决定你的总飞行时间。
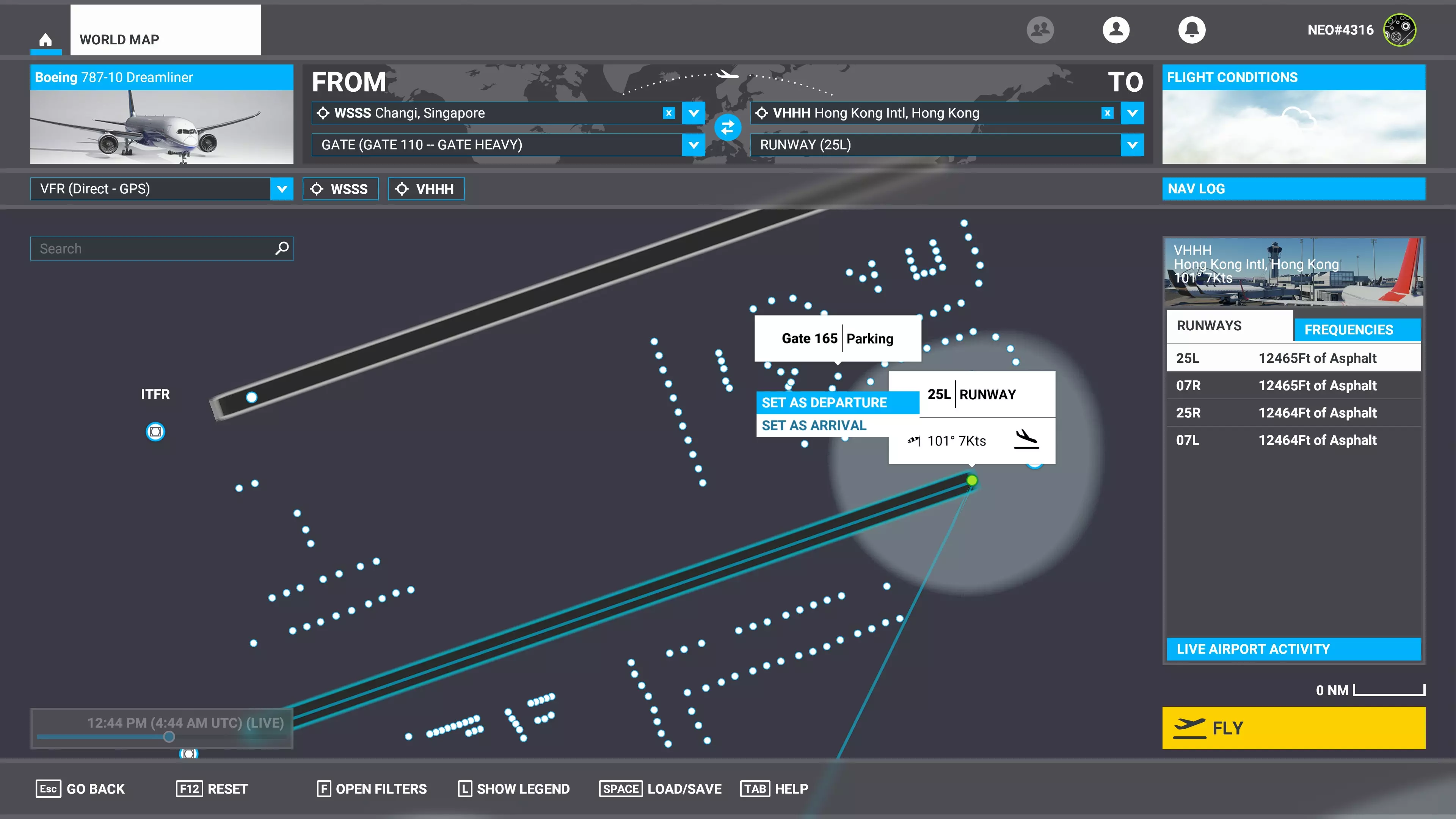
选择进场模式?现在,你还可以指定目的地的进场模式和进近方式,飞行计划会从一开始就为你加载所有内容,空中交通管制也会根据你预加载的飞行计划为你提供指引。 不过,在这个过程中存在风向问题。如果你一开始就使用游戏显示的目的地活动跑道选择跑道进近和进场模式,那么在飞行过程中风向发生变化时,你可能会面临顺风着陆的风险。这在航空领域是不推荐(甚至可能是违规)的做法。而且由于空中交通管制会严格遵循你预加载的进场和进近模式,他们不会允许你更换跑道。相反,如果你可以选择名称中包含“ALL”的进场模式,只要它有从你出发机场开始的最佳飞行路径,就选择该模式。或者选择“直飞”模式。进场方式选择“自动”。 本指南将展示如何在下降和进近阶段向飞行管理计算机(FMC)输入标准终端进场路线(STAR)。 导航日志:如果你想查看飞行计划中的航路点以及巡航高度,可以打开导航日志。你可以对此进行修改,但建议保持原样,因为它已经根据你的飞机和航线设置了最佳高度。
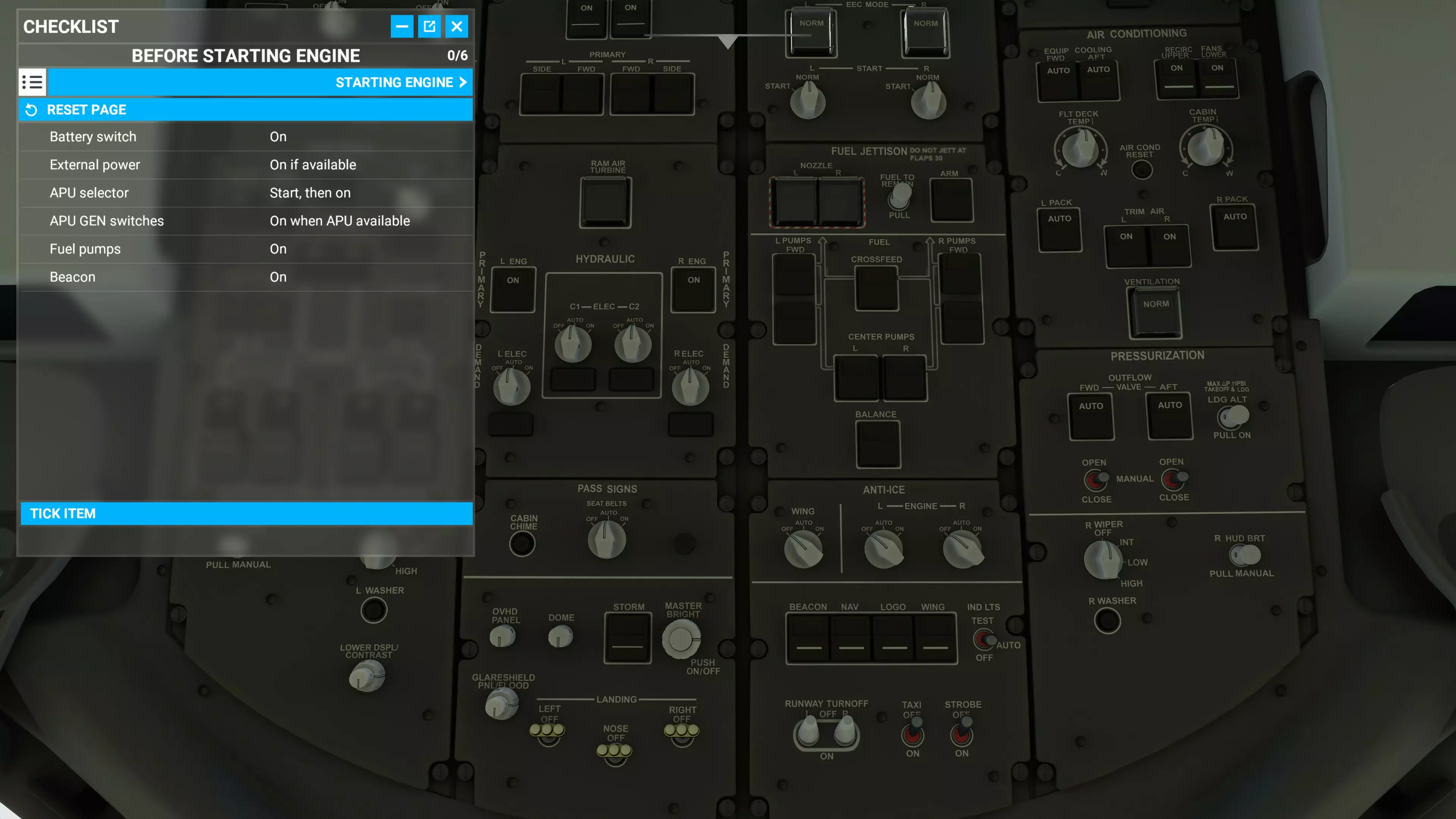
即刻起飞 随时准备好后,即可开始飞行。 飞行前检查清单 开始检查清单 当你开始飞行时,应从指定停机位的冷舱状态开始。你可以启动发动机前检查清单以开启辅助动力装置。你还可以使用多种可用的地面服务,例如: 燃油车 地面电源装置 行李服务 餐饮服务 登机桥



获取IFR许可 使用ATC菜单从空中交通管制获取IFR许可。他们会提供初始高度分配和应答机编码。无需手动将此应答机编码输入应答机,但如果应答机出现故障,可参考故障排除部分了解修复方法。 在高度保持面板中输入ATC给出的高度。确保将高度计重置为正确的气压(默认按键盘B键),以便主飞行显示器显示正确高度。


预位并激活自动油门(A/T)、横向导航(LNAV)、垂直导航(VNAV)和飞行指引仪(F/D)。 在地面激活自动油门、横向导航和垂直导航时,它们会设置为预位状态。查看主飞行显示器(PFD)和平视显示器(HUD)可确认这一点,此时会显示绿色的起飞/复飞(TO/GA)模式,下方以白色显示横向导航和垂直导航。这表明一旦预位,横向导航和垂直导航将在起飞/复飞模式完成后接管飞行。不过,在自动驾驶未接通前,它们不会对飞机产生任何作用。 飞行指引仪能让你看到飞机相对于计算机设定的最佳姿态的位置。飞行指引仪仅在主飞行显示器上显示为紫色十字,不会在平视显示器上显示。请注意,下方图片未显示自动油门已激活,这是我之前截取的早期截图。因此,你可以在当前阶段激活自动油门,因为我们希望自动驾驶仪在稍后起飞后接管油门以进行爬升。


请求推出并启动发动机 在此阶段,你应准备好进行飞机推出和发动机启动。首先断开已连接的登机桥,然后释放油门旁的停机刹车。 使用发动机启动检查单开始启动发动机。接着向空中交通管制地面服务请求推出。注意,虽然你可以让地面操作员转动飞机进行推出,但有时选择左转还是右转可能会让人混淆。 飞机推出后的朝向取决于地面操作员的视角。因此,如果你是飞行员,方向是相反的。如果你希望从自己的视角看,飞机推出后朝向右侧。在菜单中选择【左转】,因为从地面操作员的视角来看,你希望飞机向左转向。反之亦然。


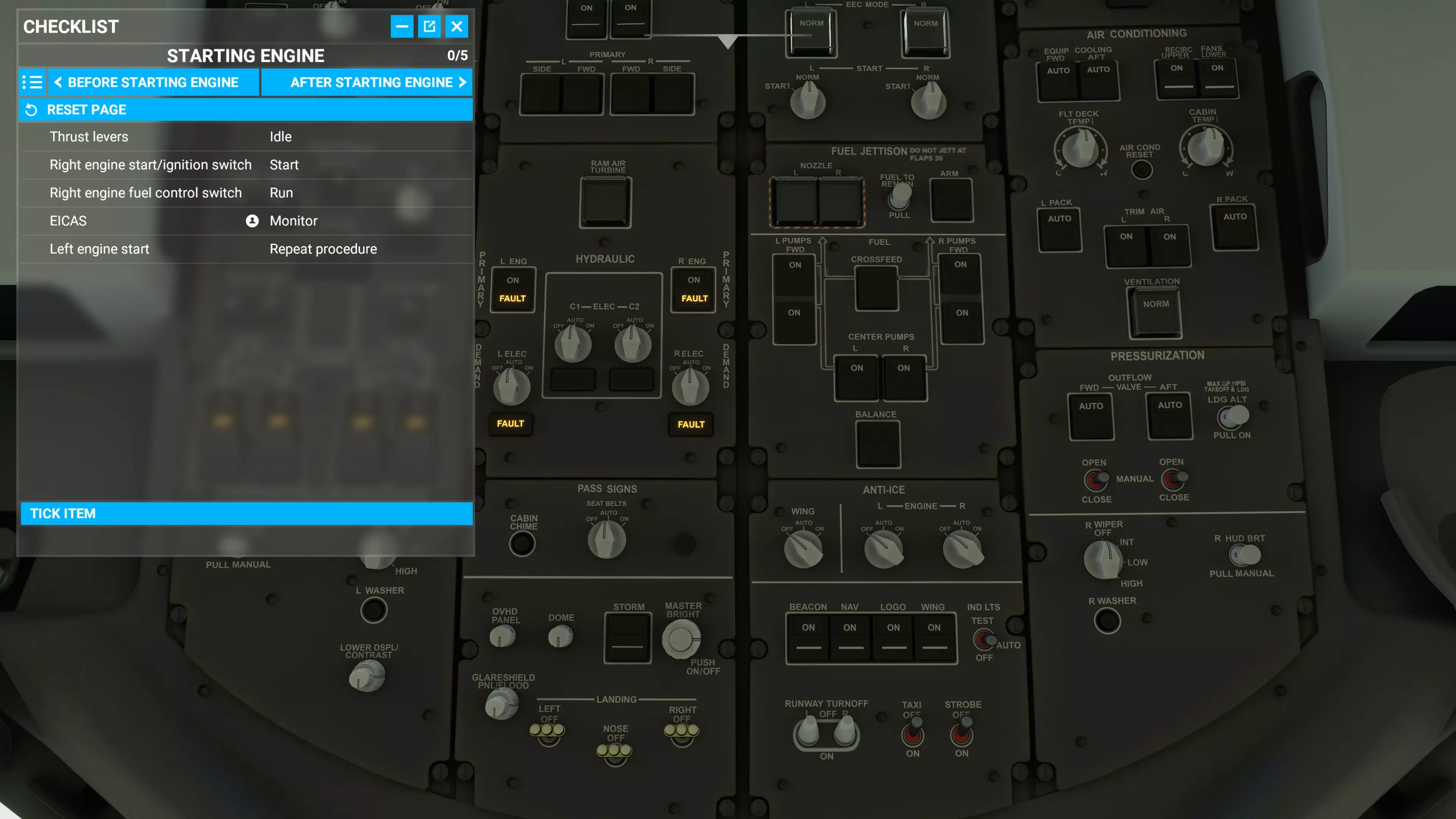

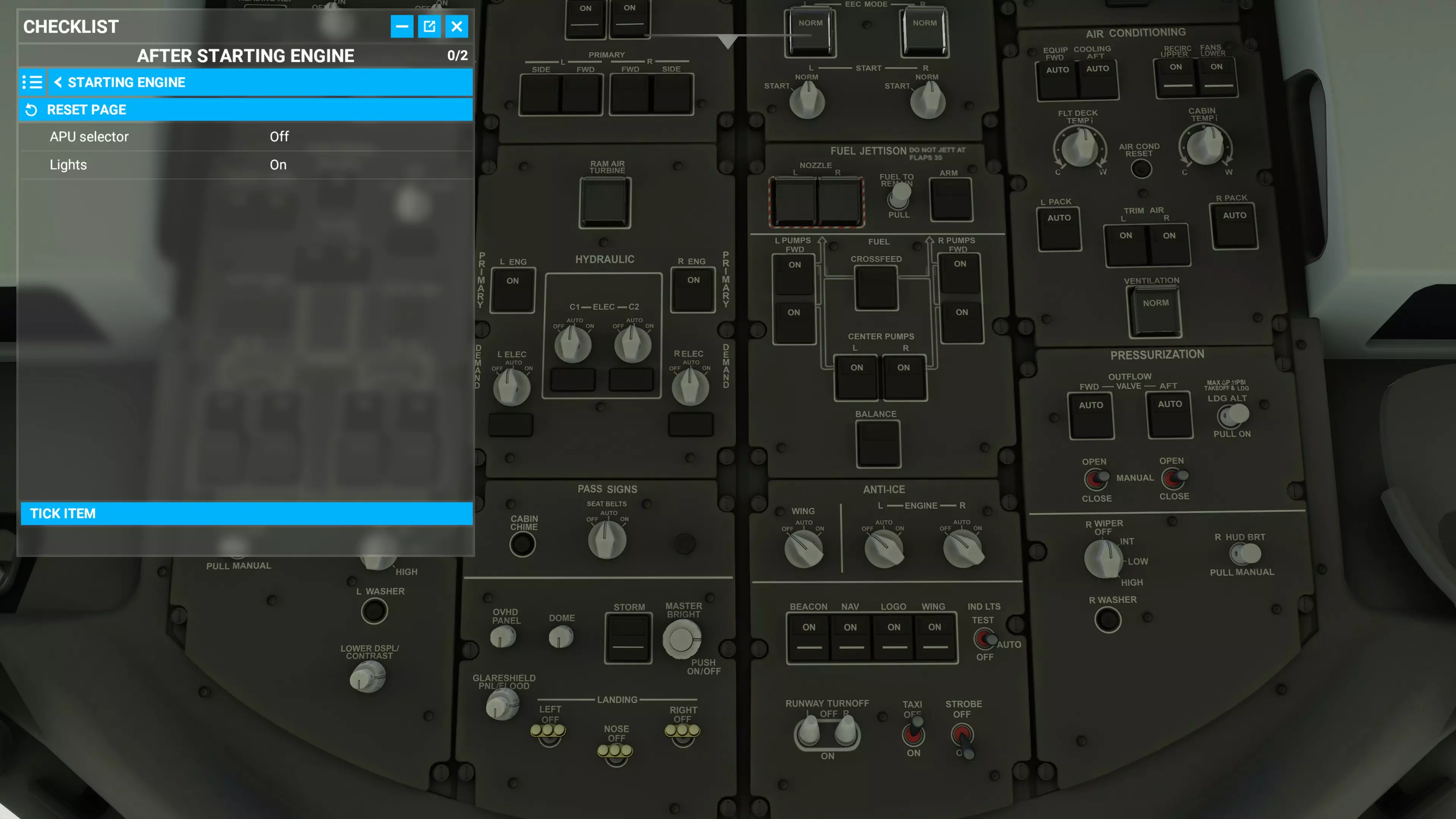
滑行与起飞 发动机启动后检查单 当你完成飞机推出并使飞机朝向正确方向,且所有发动机均以最佳状态运行时,执行发动机启动后检查单和飞行操纵检查单。这是为了确保主要飞行操纵系统正常工作。你可以通过操纵控制装置来进行检查:左倾、右倾、俯仰向上、俯仰向下、左偏航、右偏航、展开扰流板。务必通过外部视角确认所有操纵装置均能正常运作。 回到驾驶舱后,将襟翼伸展至5或10度以准备起飞。

通过ATC菜单向空中交通管制获取滑行许可。如果开启了滑行引导带导航辅助功能,它会为你显示前往跑道的正确路径。获得滑行许可后,轻轻推动油门开始滑行,并沿着路径前往跑道。 此时,建议将空中交通管制的管理工作交给AI副驾驶,这样你就可以专注于滑行以及之后的飞行操作。



从空中交通管制获取起飞许可并起飞。当你到达跑道后,在进入线停下并联系空中交通管制以获取起飞许可。获得许可后,打开所有着陆灯,滑行至跑道中心线,将油门推至40%以监控确保一切稳定,然后再推至100%全油门起飞。一旦开始以正上升率离地,收起起落架,并保持在跑道中心线上直至完全脱离跑道。



使用VNAV和LNAV进行爬升与巡航 爬升模式 飞机离地并脱离跑道后,之前预位的LNAV和VNAV模式会取代TO/GA模式。手动继续爬升,直至至少达到2500英尺高度。然后按下驾驶舱两侧的A/P按钮,激活双自动驾驶仪。 激活自动驾驶仪后,系统将开始引导飞机沿横向和垂直路径飞行。这能确保飞机保持在离场飞行计划航线上,并以最佳爬升率开始爬升。因此,在飞行计划中设置离场程序非常重要,这样可以保证LNAV接通时飞机仍与跑道保持正确航向。你还需要启动并激活自动油门。这将确保计算机在垂直导航爬升期间接管你的爬升速度。


管理垂直导航(VNAV) 目前,有两种方法可以管理垂直导航。 使用飞行计划的垂直导航爬升: 由于垂直导航目前尚未完全功能化,它会直接将爬升率设置为巡航高度。虽然在大多数情况下这没有问题,但在空管分配高度时表现不佳。 问题在于,当你到达第一个分配的高度时,这在很大程度上取决于空管是否正在与其他飞机通信。如果通信畅通,他们会注意到你在爬升时已到达分配的高度,然后会为你分配另一个高度,如此重复,直到你到达巡航高度。这是大多数情况下会发生的情况。但如果在持续爬升过程中,当你到达指定高度时,管制员正在与另一架飞机通信,那么当管制员可以监控你的爬升时,你可能已经超过了指定高度,他们会告知你已高于指定高度,并指示你下降至该高度,然后在你继续爬升时重新分配更高的高度。这个问题从FSX甚至更早的模拟飞行中就存在了,所以在这里出现并不让我感到惊讶。 控制垂直导航爬升: 为了缓解第一点中提到的问题,你可以使用高度保持选择旋钮和按钮来控制爬升。 我们已经设置了仪表飞行规则许可期间分配的第一个高度阈值。在垂直导航(VNAV)爬升阶段,我们只需按下高度保持选择按钮。 不要与旋钮下方的高度保持按钮混淆。下方的按钮用于垂直速度(V/S)模式,本指南中我们不会涉及该模式。本文仅讨论如何使用VNAV爬升,而非V/S高度保持模式。 因此,请按下用于更改高度的旋钮。其作用是告知计算机在VNAV模式下执行“爬升至指定高度”的管理式爬升。飞机会短暂平飞,此时VNAV将进入VNAV速度(VNAV SPD)模式。飞机会保持最佳爬升速度,只有当飞机能够维持该速度时,才会开始以最佳速率爬升。 因此,飞机在开始爬升前短暂平飞几秒钟是正常现象。别慌,耐心点,它会正常运行的。

VNAV爬升的一大优点是,当接近目标高度时,它会自动降低垂直速度。这意味着VNAV绝不会超过目标高度,从而为空中交通管制(ATC)留出充足时间来响应并为你分配新的高度。 注意:当ATC指示你爬升至飞行高度层(FL)时,你必须将高度计重置为标准(STD)模式,而非实际气压模式。这会使主飞行显示器(PFD)上的高度显示从以千英尺为单位的高度,变为带有FL前缀的飞行高度层。

继续这样操作,直到达到巡航高度。每当空中交通管制(ATC)分配新的高度时,使用旋钮更改高度保持选择器,然后按下旋钮本身。飞机会先处理几秒钟以确定最佳爬升率,之后不久便会开始爬升。请保持耐心。 一旦达到巡航高度,你的垂直导航(VNAV)模式将变为VNAV PTH,这表示飞机正在保持飞行计划中设定的高度。


LNAV 起飞后,你的LNAV将负责管理横向导航。它会引导你沿航线飞行,并依次前往下一个导航点,直至到达目的地。通常情况下,这部分不需要太多操作,只要你从一开始就正确规划了飞行计划。 自动油门 VNAV将与自动油门协同工作,为你提供最佳的爬升空速。根据国际航空法规,在10,000英尺以下,自动推力会将速度维持在最高250节。因此,VNAV会持续爬升,直到达到10,000英尺后停止爬升并改平,以便飞机加速至超过250节,达到最佳爬升速度。一旦达到该速度,飞机将继续爬升。再次强调,不要惊慌。这是确保你以最佳方式爬升的正常现象。 加快飞行时间 通常,飞行计划会设定一个自动驾驶仪将遵循的巡航空速。在垂直导航速度模式下,自动驾驶仪将保持飞行计划规定的特定速度。垂直导航速度由多种因素决定,例如机上燃油量、巡航高度以及平衡飞行时间和燃油效率的最佳速度。默认情况下,这一速度通常为0.84马赫。 遗憾的是,我尚未找到在飞行管理计算机中更改垂直导航速度的方法,因此如果你想更快到达目的地,可以将垂直导航速度模式调整为更快的速度。但必须注意,设定的空速不能超过超速限制,否则会损坏飞机。要执行此操作,请点击MCP上的【启用速度干预】旋钮,此时你应该能在VNAV中看到已设置的马赫速度。只需转动旋钮至更高速度,PFD上就会显示新的速度。确保将速度设置在超速限制以下一级,飞机油门就会开始提供足够的推力以达到该速度。 请注意,飞机发动机提供的推力越大,飞行速度固然越快,但与使用默认VNAV速度相比,燃油消耗也会更多。




使用垂直导航(VNAV)下降 垂直导航管理下降 与前一节中的爬升指引类似。当你接近目的地时,空中交通管制(ATC)会给出下降指令。此时无需使用垂直速度(V/S)和高度保持(Alt Hold)模式并自行管理空速,而是使用垂直导航管理下降模式。 需要注意的是,垂直导航目前无法完全根据飞行计划自动下降。你需要通过高度保持选择旋钮选择新分配的高度,然后按下该旋钮进行干预。 飞机将花费几秒钟时间运行所需算法,并调整发动机推力以维持当前速度,之后才会开始下降并保持该速度。像往常一样,不要惊慌,觉得一切都失灵了。其实系统是正常运行的,你只需要耐心等待,让飞机电脑自行处理。下降时,垂直导航(VNAV)会进入垂直导航速度(VNAV SPD)模式,一旦到达指定高度,它就会切换为垂直导航高度(VNAV ALT)模式。



请注意,当空中交通管制(ATC)将高度指令从飞行高度层(FL)改为千英尺时,你需要像爬升过程中那样调整高度表以使用气压值。反过来操作时重复此步骤即可。

VNAV管理下降模式下的自动油门 与爬升阶段类似,自动油门会为下降阶段自动分配最佳空速。当你被分配到低于10,000英尺的高度时,飞机将首先在10,000英尺高度平飞,以减速至250节。一旦达到250节,飞机将以最佳下降率继续下降。 使用FMC进行进近和ILS准备 在FMC中设置标准终端进场程序(STAR)和进近 当你接近目的地时,空中交通管制(ATC)会为你分配ILS跑道进近和过渡程序。过渡程序是指你必须通过的航路点,以对准ILS跑道。操作步骤如下: 进入FMC,选择DEP-ARR(离场-进场)按钮。

选择【抵达】

你应该能看到所有可用的跑道进近和标准终端进场程序(STAR)列表。
选择空中交通管制(ATC)指定的跑道。在此示例中,他们已指定通过LIMES过渡点的ILS 07R跑道进近。因此,从列表中选择该跑道,并选择通过LIMES的过渡点。


选择跑道和过渡程序将筛选出适合的标准终端进场程序(STAR)。除非你有实际的进近图,否则这个过程中有很多猜测成分。选择最适合你当前位置且通往跑道的最优路径的标准终端进场程序。从顶部菜单打开目视飞行规则(VFR)地图可以让操作更轻松。 目视飞行规则地图上的黄线是你计划使用该标准终端进场程序执行的临时航线。在这种情况下,它会引导飞机绕经一个较远的航路点,这不是我们想要的。因此,我们需要选择另一个标准终端进场程序。


重要提示:选择标准进场程序(STAR)时,请注意它们是以机场周围散布的航路点名称的前几个字母命名的。确保选择的STAR以你尚未经过的航路点开头。选择包含位于你身后航路点的STAR会导致飞行管理计算机(FMC)规划出先向后飞行以重新经过已飞过的航路点,然后再盘旋返回继续进近的航线。如果你选择包含前方航路点的STAR,它将更合理地规划你的航线。在此示例中,我们使用“CANT3A”标准进场程序,因为CANTO航路点在我们前方。因此,请选择该程序。 选择好标准进场程序、跑道和过渡程序后,你必须通过按下【航路】->【激活】来激活新航线。


执行按钮(EXEC Button)现在应亮起绿灯,表示已准备好执行新的飞行计划。点击执行按钮,它会将您之前的飞行计划替换为新的飞行计划。您的横向导航系统(LNAV)将自动导航以使用新的飞行计划。


检查并调谐ILS频率 大多数情况下,一旦在FMC中选择跑道,系统会自动填充正确的ILS频率,以便飞机捕获机场的航向道和下滑道信号。 你可以通过打开FMC中的NAV RAD页面来操作。如果频率已调谐(如下例所示),则无需额外操作。若频率部分为空,你需要查询该机场对应跑道的ILS频率,然后使用FMC旁边的数字小键盘输入频率数值。点击ILS-MLS按钮,系统将存储该ILS频率。

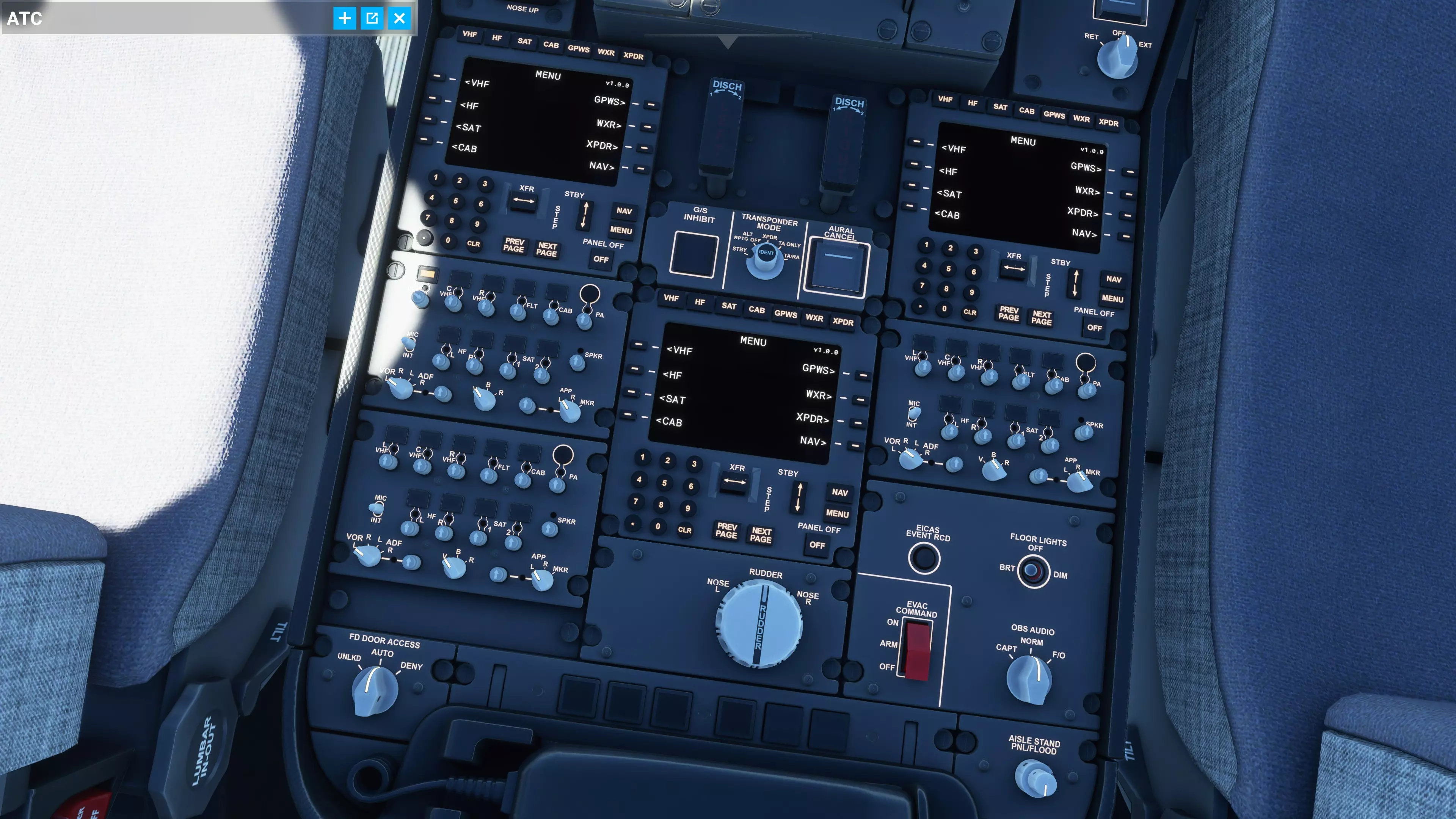
你也可以查看导航无线电面板,确保频率也已输入其中。无线电栈位于中央控制台,就在油门杆下方。点击导航菜单,你应该能够查看或输入ILS频率以及航向。

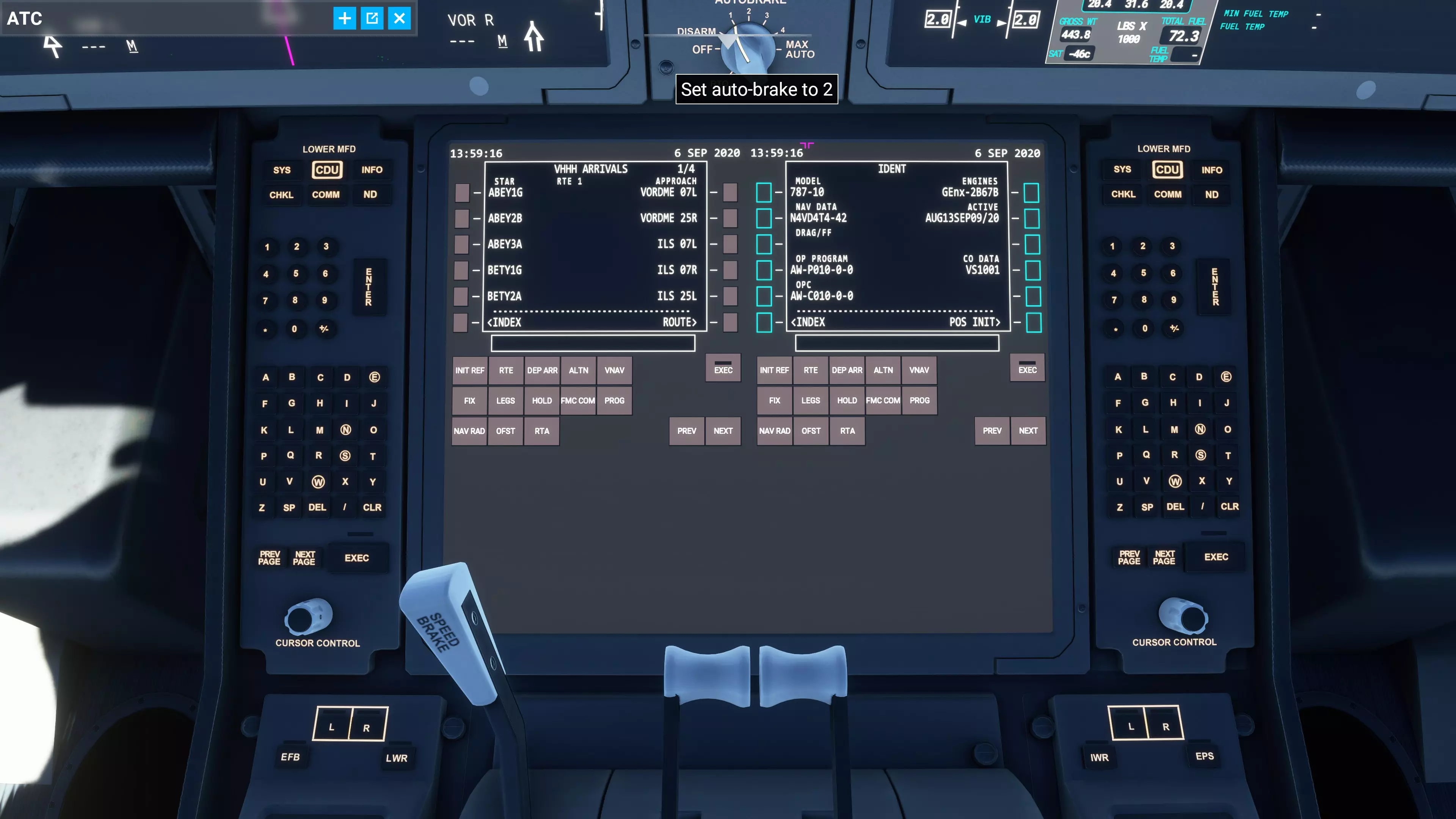
完成所有这些设置后,LNAV将接管控制,你只需留意高度,并根据空中交通管制(ATC)分配的下一个高度进行相应调整。 最后进近阶段: 当你接近标准终端进场航线(STAR)时,ATC会持续为你分配更低的高度。目前ATC存在一个问题,即它们没有遵循STAR中每个航路点给定的高度限制。这有时会导致你收到较晚的下降指令,或者其分配的高度与STAR中用于截获下滑道的高度不匹配。 这时你需要自行判断飞行。考虑你的下降率,看是否能及时到达正确高度。如果不能,就进入等待航线。切换到航向模式,从当前航向进行180度转弯。这会使飞机转向与跑道相反的方向,同时你要继续下降以达到指定高度。完成后,向跑道方向做180度转弯,此时你应该仍能对准跑道。 如果一切顺利,在10,000英尺高度时,就该执行最终进近检查单了。 预位扰流板,以便在接地时自动展开。 设置你想要的自动刹车。较短或湿滑的跑道可能需要更高的自动刹车设置,否则设置1或2即可。 将着陆灯和跑道脱离灯设置为开启。

当飞行高度达到10,000英尺时,自动油门会根据航空法规减速至最大250节。在飞机减速至250节之前,飞机将停止下降并保持在10,000英尺高度,直至速度降至250节或以下。达到该速度后,飞机将继续下降。


当飞机到达减速点(DECEL point)或进入标准终端进场程序(STAR)的第一个航路点时,飞机将进入进近模式。该模式会在未放下襟翼的情况下进一步自动降低飞机速度,这一状态可在主飞行显示器(PFD)上查看。注意,紫色目标空速指示器会设定在绿色“UP”文字的下方,此位置显示了可以开始放出襟翼的速度限制。只要空速低于“UP”限制,就可以逐渐放出襟翼,此时自动油门(A/T)会选择一个新的更低目标空速。放出的襟翼越多,目标空速就会变得越低。


航向信标与下滑道 如果已检查并确认ILS频率已输入飞行管理计算机(FMC),飞机将自动检测信号并在显示屏上激活ILS模式。可以通过观察高度条和航向条旁的垂直点和水平点来确认这一点。 紫色菱形图标会显示飞机是否与ILS正确对齐。

航向信标是地面发射机,供飞机接收。它是仪表着陆系统(ILS)的一部分,用于指示飞机是否在水平/横向轴上对准跑道。若紫色菱形显示在中心线右侧,说明飞机偏左,此时飞机会右转修正,反之亦然。 下滑道与航向信标功能类似,但负责飞机的垂直引导。 当主飞行显示器(PFD)上出现ILS引导指示时,可按下模式控制面板(MCP)上的APP按钮来预位进近模式。此操作会将航向信标(LOC)和下滑道(G/S)模式分别以白色文字预位在当前激活的横向导航(LNAV)和垂直导航(VNAV)模式下方。现阶段,你的飞机仍在LNAV(横向导航)和VNAV(垂直导航)模式下飞行,但处于待命状态,等待捕获ILS(仪表着陆系统)信号。一旦捕获到该信号,LNAV将切换至LOC(航向道)模式,VNAV将切换至G/S(下滑道)模式。


截获航向道的过程要简单得多,只要你在信号覆盖范围内,并且大致处于跑道探测角度内,就能截获航向道,飞机也会修正你出现的任何偏差。在下方示例中,航向道已被截获,并且它会开启航向道模式,取代导航模式。

与航向道相比,下滑道更难捕获,因为你需要让紫色菱形对准中心线才能捕获它。因此在大多数情况下,理想的做法是观察垂直下滑道上的紫色菱形,判断自己是过高(紫色菱形位于中心线下方)还是过低(紫色菱形位于中心线上方)。 如果过高,无视空中交通管制的任何指示,迅速下降。如果需要像本节开头那样进行等待航线,那就执行。这将有助于之后捕获下滑道。 如果过低,那完全没问题。因为当你接近跑道时,随着你从下方捕获下滑道角度,紫色菱形指示器会逐渐下移至与你的中心线对齐。只要通过按下APP按钮激活G/S(下滑道)。当紫色菱形图标到达中心线时,你的LNAV(横向导航)将切换至G/S模式,飞机将根据下滑道角度接管下降率。让飞机逐步带你下降。 简而言之,【偏低总比偏高好】。


当获得着陆许可后,你会注意到飞机会自动激活【滑跑模式】和【拉平模式】。这是正常现象,因为在即将接地时,飞机将在接地前自动拉平以减缓下降率。而滑跑模式会在接地后激活,使飞机能够通过前轮转向保持在跑道中心线内。


着陆 管理进近速度 那么,最终进近跑道时的最佳空速是多少呢?我发现答案是“视情况而定”。影响进近速度的因素有很多,比如风向和风速,而最重要的是飞机的总重量。 一般规则是,飞机越重,进近跑道时需要保持的速度就越大。不过,开发者对787的气动设计存在一个小问题。你在起飞时就能发现这一点:飞机甚至在达到V1速度标记前就已经离地了。这让人感觉787在低速时的升力比其他飞机要大得多。 这种物理特性同样适用于进近和着陆阶段。接近跑道时,你需要比想象中慢很多: 如果接近跑道的速度过快,在接地前飞机【拉平】时仍会产生升力。即使成功接地,飞机也会弹跳并再次开始爬升。 如果接近跑道的速度过慢,要么会阻碍后方交通,要么可能导致失速。 综合考虑这些因素,我发现接近跑道的最佳空速应处于失速区域前的黄/棕色警告区内。这样既能保证飞机在拉平时足够慢以停止产生升力,又能保持足够速度防止失速。最佳进近速度如下: 距离跑道10海里及以内时保持180节,然后放下襟翼减速至160节; 距离跑道5海里及以内时,断开自动油门,手动控制油门,将速度降至最终进近阶段的黄/棕色警戒区域。


无线电高度表提示与波音787着陆 在离地2500英尺时,无线电高度表提示功能将激活,并播报飞机与地面的距离。你可以以此为基准进行着陆操作。 当2500英尺提示响起时,完全放下襟翼并展开起落架。 持续监控所有仪表和外部环境,确保精密进近航道指示器(PAPI)灯光为两红两白,以保证飞机处于最佳下滑道角度。同时确认仪表着陆系统(ILS)钻石指示器保持在中间位置。在最后进近阶段,务必始终将空速保持在黄/棕色警戒区内。在50英尺高度提示时,你的飞机会进入flare模式,并在着陆前开始拉平。在此阶段,将油门拉回至怠速以切断动力,飞机将滑翔至跑道并着陆。注意,有时你可能需要辅助自动驾驶仪进行小幅拉平。只需将操纵杆向后拉至足以辅助拉平的程度,但不要拉得过多导致自动驾驶仪断开。

一旦接地,你的扰流板会自动展开,自动刹车也会开始启动。你只需使用反推直到速度降至70节,然后将反推杆退回至慢车位置。密切关注地面速度,当速度降至30节时,解除自动刹车,改用人工刹车,直到飞机速度降至20节并可以滑行。转向下一个可用的滑行道离开跑道,然后推油门以20节的速度滑行。 示例视频 这是我在悉尼机场进行最终进近的示例视频,基本总结了本指南中的所有操作步骤,你可以将其作为参考。需要注意的是,在这段录制中,我遇到了无线电高度表语音提示失效的故障。因此,你需要留意主飞行显示器(PFD)上的实际无线电高度表数值,以判断何时执行拉平(FLARE)操作以及何时将油门收至慢车(IDLE)状态。
故障排除 求救,我的应答机出现故障 有时可能会发生应答机故障或重置为其他应答码的情况。如果不解决此问题,空中交通管制(ATC)将取消你的仪表飞行规则(IFR)飞行计划,你将被迫转为目视飞行规则(VFR)飞行。 幸运的是,有一个快速解决方法可以使用ATC提供的正确应答码重置应答机。所以不要惊慌,你可以在无线电面板上进行操作。 进入应答机(XPDR)页面。记下ATC提供的应答码,通过数字键盘输入该号码,然后点击左上角标有XPDR的按钮。如果操作成功,应答机上的号码将更新为新的应答码,ATC也将不再为此事联系你。