换一换
换一换 





本指南详细介绍了《反恐精英:零点行动》中所有游戏内AI机器人控制台命令和变量,以及所有AI机器人导航网格编辑控制台命令。 机器人命令与队伍平衡 机器人命令 bot_add [名称] bot_add_t [名称] bot_add_ct [名称] 添加一个机器人(可选择在“BotProfile.db”机器人个性和技能等级数据库文件中包含的“名称”)到游戏中。“bot_add”会将机器人添加到由“bot_join_team”控制台变量指定的队伍。“bot_add_t”和“bot_add_ct”强制机器人加入特定队伍。 bot_kill [名称, all] 此命令可以输入机器人名称,或使用关键词“all”(导致游戏中所有机器人被杀死)。bot_kick [名称, all] 该命令可输入机器人名称或关键词"all"(将踢出游戏中所有机器人)。 bot_knives_only bot_pistols_only bot_snipers_only bot_all_weapons 这些命令是用于相应设置"bot_allow_*"控制台变量的快捷方式。 bot_difficulty [0 - 3] 此控制台变量决定所有新创建机器人的难度。0=简单,1=普通,2=困难,3=专家(难度值高于"3"将重置为"3")。注意:游戏中已存在的机器人将保留其初始创建时的难度设置。 bot_quota [最小机器人数量] 将此控制台变量设为非零值后,游戏将维持指定数量的机器人。若有机器人被踢出,会添加新机器人以维持数量。要禁用配额,请将其设置为零。 bot_quota_match [比例] 设置每个人类玩家对应的机器人数量比例(即“机器人数量 = 人类玩家数量 * bot_quota_match 比例”)。当人类玩家加入或离开服务器时,游戏中的机器人数量将相应调整。请注意,此命令会覆盖“bot_quota”命令。 bot_auto_vacate [0, 1] 设置为1可强制机器人自动离开服务器,为人类玩家腾出位置(设置为0则禁用)。 bot_prefix [字符串] 给定的[字符串]将添加到所有后续添加的机器人名称前。这对于给机器人添加“战队标签”很有用。 bot_join_team [ct, t, any] 确定机器人将加入哪个队伍。bot_join_after_player [0, 1] 若设为非0值,机器人将等待至少有一名人类玩家加入后才会进入游戏。 bot_allow_pistols bot_allow_shotguns bot_allow_sub_machine_guns bot_allow_rifles bot_allow_snipers bot_allow_machine_guns bot_allow_grenades bot_allow_shield 所有以“bot_allow”开头的控制台变量(CVars)取值均为0或1。若设为0,机器人将不会购买或使用对应类别的武器。 bot_allow_rogues [0, 1] 若设为非0值,允许机器人偶尔“叛变”。叛变的机器人会“边跑边射击”,并对所有无线电指令回复“不行”。 bot_defer_to_human [0, 1] 若设为非0值,强制机器人将回合目标(如携带炸弹等)让给人类玩家。 bot_walk [0, 1] 强制所有机器人步行(不允许奔跑)。bot_stop [0, 1] 若值非零,所有机器人将停止移动和响应(暂停所有机器人)。 hostage_stop [0, 1] 若值非零,所有人质将停止移动和响应(暂停所有人质)。 bot_chatter [normal, minimal, radio, off] 设置机器人无线电聊天量(正常、极少、标准无线电或关闭)。 bot_profile_db [filename.db] 设置定义机器人个性和技能等级的数据库文件名。注意默认数据库文件名为“BotProfile.db”。 bot_about 显示机器人模块版本号以及机器人作者信息。 自动机器人与人类玩家队伍平衡 注意在《反恐精英》和《反恐精英:零点行动》(当游戏中存在机器人时)中,队伍平衡机制可能会有些令人困惑。以下设置将允许人类玩家切换队伍,并允许且强制机器人在下次回合开始时更换队伍以保持平衡: bot_auto_vacate 1 mp_autoteambalance 1 mp_limitteams 0 导航网格编辑

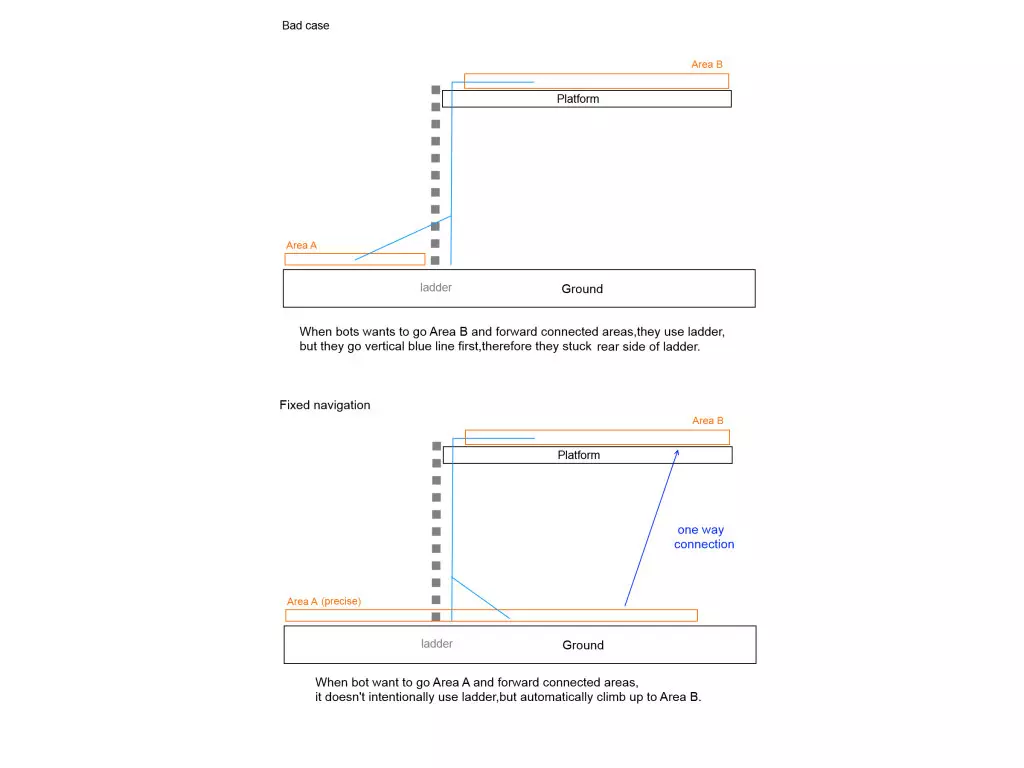
导航网格编辑 以下每个"bot_nav_*"命令都可用于操作导航网格,允许手动调整自动生成的数据。建议将这些命令绑定到按键上,以便在编辑时更方便使用。注意,此操作没有"撤销"功能,因此请经常保存导航网格! bot_nav_edit [0, 1] 将此控制台变量设置为1,即可手动调整机器人的导航网格。激活编辑模式后,就可以使用"bot_nav_*"命令。 bot_nav_zdraw [高度值] 此值决定在导航编辑模式下,导航"网格"绘制在地面上方的高度。如果地形非常不规则或坡度较大,可将此值增加到10或15。默认值为4。bot_nav_mark 标记当前选中的导航区域,以便后续操作。 bot_nav_warp 将你的视角传送至当前标记的导航网格。注意,此命令仅在“自由视角” spectator 模式下生效。 bot_nav_delete 删除当前选中的导航区域。 bot_nav_split 沿着白色分割线,将当前选中的导航区域分割为两个新的导航区域。 bot_nav_merge 将当前选中的导航区域与之前标记的导航区域合并为一个新的单一导航区域。仅当两个区域沿合并线的尺寸相同时,合并才会进行。bot_nav_connect 创建从当前标记区域到当前选中区域的“单向”链接,指示 bots 可以“从”标记区域“前往”选中区域。对于大多数区域,你需要双向连接区域。但对于某些“跳下”区域,你可能希望 bots 只能单向移动,而无法返回。 bot_nav_disconnect 断开当前标记区域到当前选中区域的所有连接。 bot_nav_begin_area bot_nav_end_area 这两个命令用于创建新的导航区域。“bot_nav_begin_area”标记区域的一个角。“bot_nav_end_area”标记区域的对角并创建该区域。若要取消操作,再次执行“bot_nav_begin_area”命令即可。bot_nav_splice 在当前标记区域和当前选中区域之间创建一个新的导航区域,并双向连接该新区域。此命令对于创建倾斜导航区域特别有用。 bot_nav_corner_select bot_nav_corner_raise bot_nav_corner_lower 选择当前标记的导航网格("bot_nav_mark")的四个角之一,然后允许升高或降低所选角的高度。多次执行"bot_nav_corner_select"命令可在四个角之间循环切换(再执行一次则取消选择所有角)。 bot_nav_crouch 将当前选中区域标记为【蹲伏】区域,要求 bots 必须蹲下才能通过。 bot_nav_jump bot_nav_no_jump 将当前选中区域标记为【跳跃】区域或【禁止跳跃】区域。这是给机器人的提示,指示它们是否应该跳跃通过该区域。请注意,当机器人通过标记为“跳跃”的区域时,它们**总是会执行“蹲伏+跳跃”动作**。 bot_nav_precise:将当前选中的区域标记为“精确”,要求机器人在继续前往下一个区域前精确通过此导航网格。该命令在小型过道等容易掉落的区域特别有用。 bot_nav_strip:从当前标记的导航网格中移除所有接近点、遭遇点和隐藏点(这些点是通过“bot_nav_analyze”命令生成的)。 以下是高级导航网格编辑的一些示例:

导航网格区域命名 导航网格区域命名(高质量导航网格的绝对必要操作!) 注意,区域名称用于机器人无线电聊天位置,以及玩家无线电聊天的位置文本字符串。同时请记住经常保存导航网格(“bot_nav_save”)以防出错,然后再次分析导航网格(“bot_nav_analyze”)。 bot_nav_toggle_place_mode 切换到区域命名模式。准星高亮的每个导航网格将显示为以下三种颜色之一: 绿色=当前已设置的区域名称。 蓝色=已设置的其他区域名称。 红色=未设置的区域名称。 再次输入命令可返回导航网格编辑模式。bot_nav_use_place 显示以下可用地点名称列表:飞机巷、公寓、公寓楼、中庭、阁楼、后方、后巷、后门、后厅、后室、后路、后院、阳台、地下室、浴室、卧室、大办公室、炸弹点A、炸弹点B、炸弹点C、桥梁、地堡、电脑室、会议室、庭院、板条箱、爬行空间、CT出生点、甲板、私室、双门、楼下、管道、垃圾桶、电梯、入口、入口通道、家庭活动室、远端、围栏、门厅、前方、前门、前厅、前室、前院、车库、大门、门房、警卫室、人质解救区、人质、房屋、室内、厨房、梯子、小办公室、客厅、装卸平台、大厅、阁楼、长廊、主厅、市场、会议室、中间、矿井、办公室、室外、天桥、露台、门廊、放映室、斜坡、后方、屋顶、安全门、下水道、侧面、侧巷、侧门、侧厅、侧室、侧院、楼梯、楼梯间、储藏室、塔楼、卡车、T出生点、隧道、地下、地下通道、楼上、保险库、自动售货机、村庄、VIP解救区、墙壁、水、窗户、窗户、酒窖bot_nav_use_place [地点名称] 选择地点名称(例如“bot_nav_use_place BombsiteA”)。 bot_nav_toggle_place_painting 开始用所选地点名称绘制导航网格。注意,所有被准星高亮的导航网格都会变为绿色,并被设置为所选地点名称。再次输入该命令可停止绘制。之后你可以选择新的地点名称(“bot_nav_use_place [地点名称]”),并开始命名其他导航网格(“bot_nav_toggle_place_painting”)。 bot_nav_place_floodfill 设置当前高亮导航网格的地点名称,并从该网格向外进行泛洪填充,将所有相邻的导航网格设置为该地点名称(直到遇到带有不同地点名称标签的其他导航网格为止)。bot_nav_place_pick 选择当前高亮的导航网格的地点名称作为你的当前地点名称(类似于任何绘图程序中的颜色面板“吸管”工具)。 bot_nav_mark_unnamed 标记最近的未命名导航网格,并显示未命名网格的总数。当与“bot_zombie 1”“bot_goto_mark”命令(以及“bot_nav_warp”命令)结合使用时,此命令有助于定位未命名的导航网格。
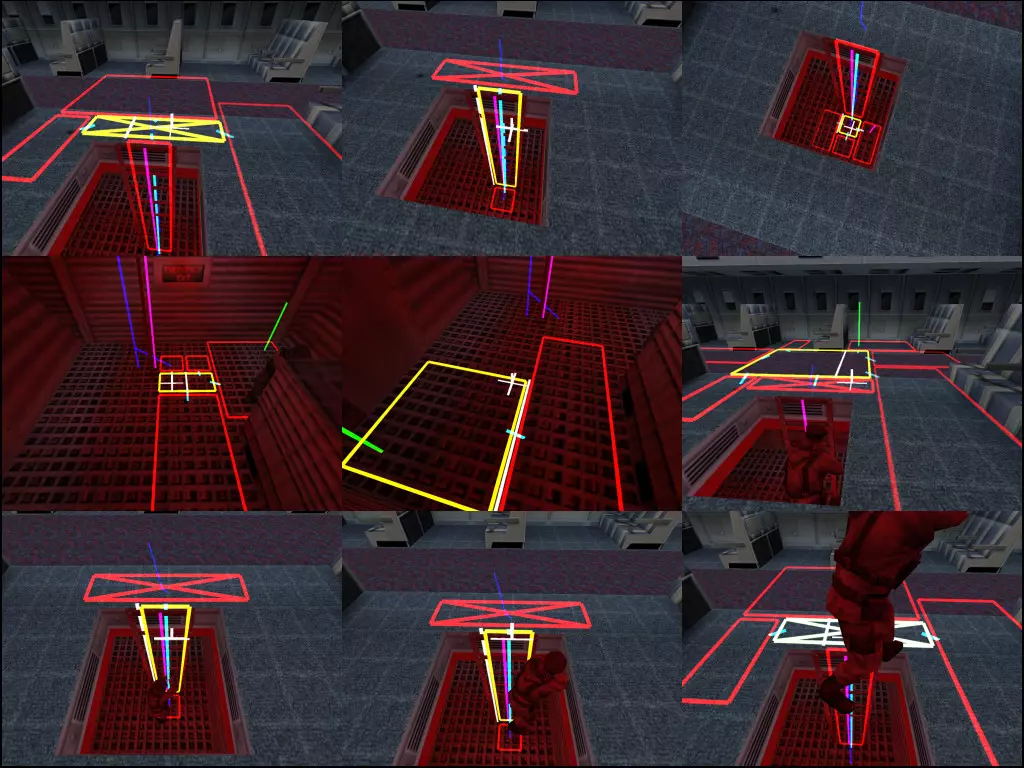
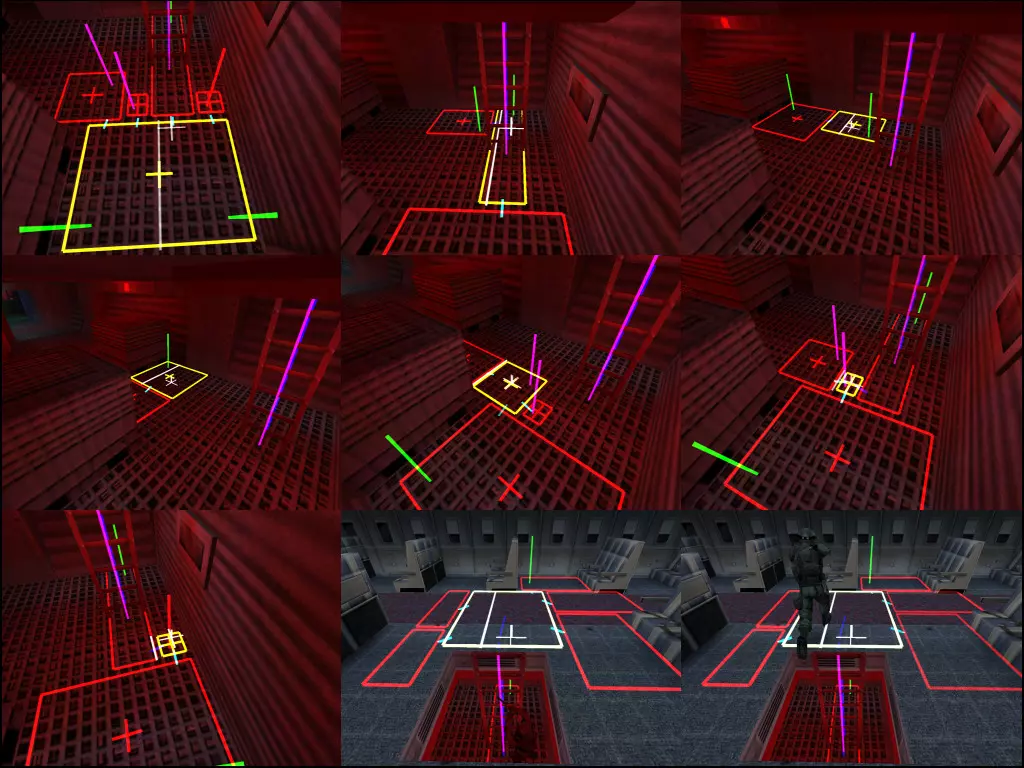
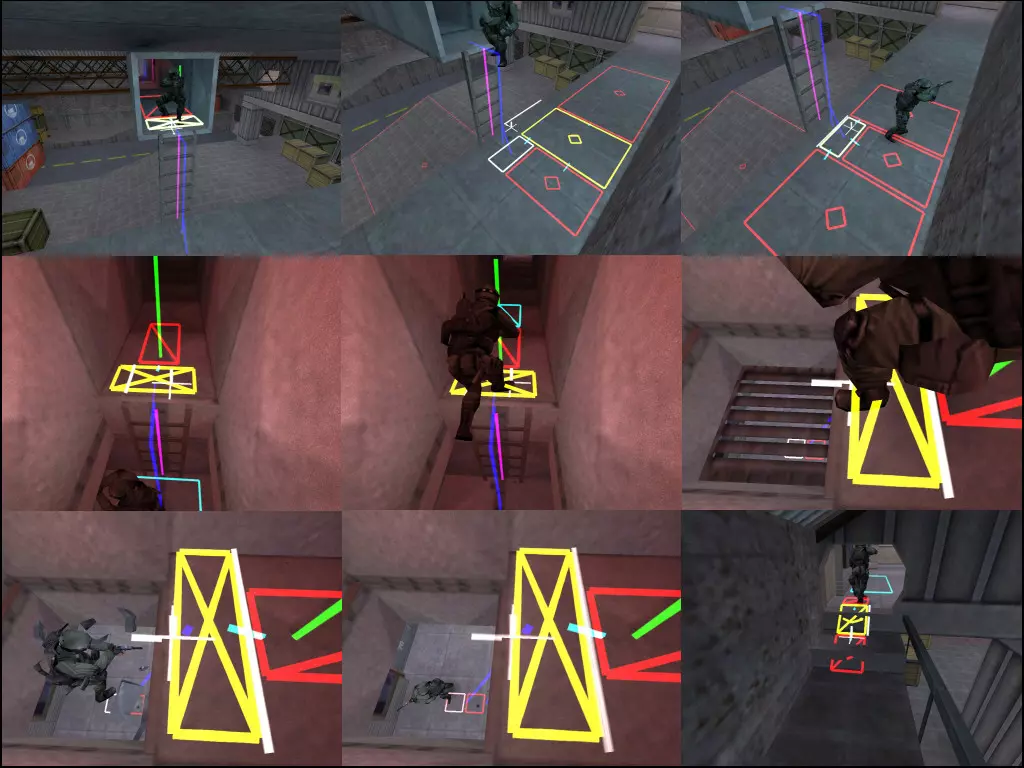
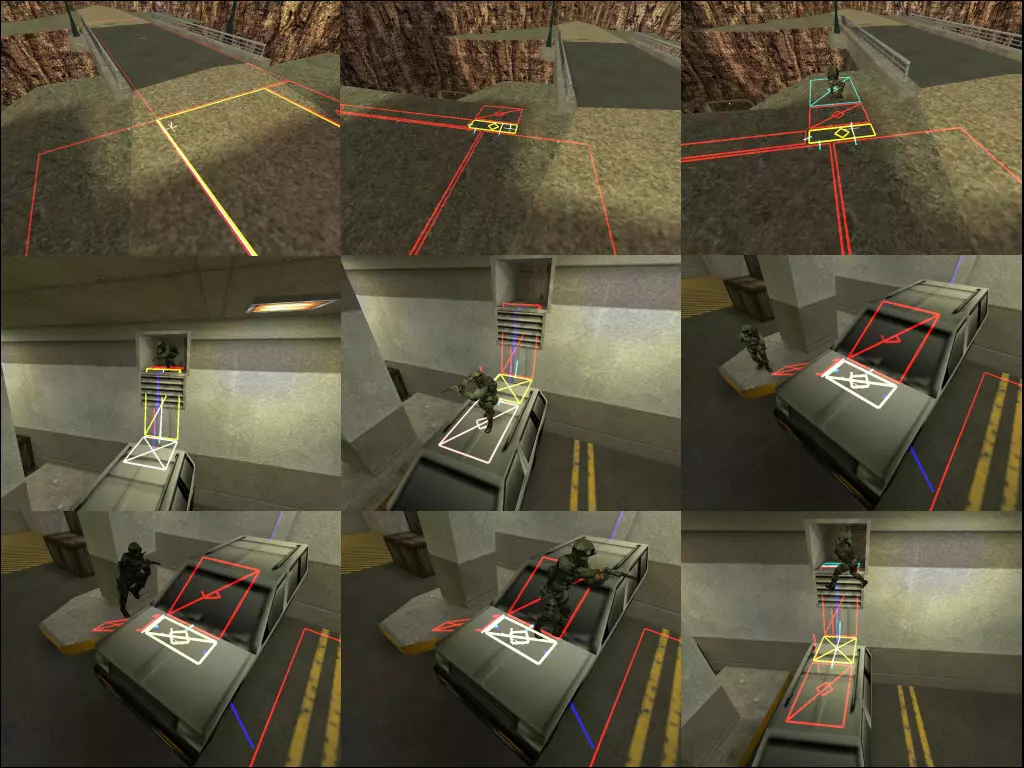
导航网格处理 导航网格处理 bot_nav_analyze 分析导航网格以确定接近点、遭遇点和隐藏点。根据地图的大小和复杂程度,此过程可能需要几分钟。请注意,此命令需要游戏中至少有一个机器人。建议的操作步骤是:保存网格,添加机器人,然后快速输入“bot_nav_analyze”。 注意:在对导航网格文件执行任何编辑并保存后,【必须对导航网格进行最后一次重新分析】! bot_nav_load 清除当前导航网格,并从磁盘加载。 bot_nav_save 将当前导航网格保存到磁盘。导航网格(“.nav”文件)会自动命名为与当前地图文件相对应。例如,如果地图是DE_Dust。bsp,导航文件将为DE_Dust.nav。 bot_quicksave [0, 1] 若该值非零,将跳过地图学习的分析阶段。这在反复手动调整导航文件时非常有用。请注意,若没有此分析,机器人将无法正常观察周围环境。 导航网格调试 导航网格调试 bot_show_nav [0, 1] 若该值非零,将绘制每个机器人附近的导航网格。 bot_show_danger [0, 1] 若该值非零,每个导航区域中的“危险”将以垂直线形式绘制。蓝色线条代表反恐精英的危险区域,红色线条代表恐怖分子的危险区域。 bot_zombie [0, 1] 使地图上的机器人忽略危险(以及地图中包含的其他环境变量),仅使用几何距离在地图中导航。此命令在与“bot_nav_mark”(或“bot_nav_mark_unnamed”)以及“bot_goto_mark”命令配合使用时,可用于测试导航网格特定部分的可行走性(或在编辑导航网格地名时定位未命名的导航网格)。 bot_goto_mark 使地图上的 bots 移动到当前标记区域的中心。当与“bot_zombie 1”命令配合使用时,此命令可用于测试导航网格特定部分的可行走性。 bot_nav_check_consistency [filename.nav] 检查 bot 导航网格文件的一致性和完整性。 bot_traceview [0, 1] 用于对当前正在观察的 bot 的导航进行内部调试。青色线条表示机器人的朝向,紫色线条表示机器人的视野范围,橙色线条则表示机器人即将前往的下一个导航网格(以及机器人完整的未来路径)。请注意,此命令仅在“第一人称”或“自由追踪视角” spectator模式下生效。 bot_debug [0, 1, 2] 用于机器人行为的内部调试。设置为1时,将显示当前正在观察的机器人的调试信息(请注意,此功能仅在“第一人称”或“自由追踪视角” spectator模式下生效);设置为2时,将显示所有机器人的调试信息。调试信息将打印到控制台,显示机器人当前的思考和行动,以及与机器人行为或导航相关的任何错误或警告消息(包括可听见的警告声音)。 hostage_debug [0, 1] 用于人质导航的内部调试。紫色线条表示人质的朝向,绿色线条表示人质的视野,橙色线条表示人质即将前往的下一个导航网格,黄色线条表示人质完整的未来路径。请注意,使用此命令时,你应扮演反恐精英,并已对人质按下【使用】键(指示其跟随你)以获得最佳效果。最后请注意,此命令还会显示调试消息,这些消息将打印到控制台,显示人质当前的想法和行为(就像上面的“bot_debug”命令一样),以及与人质行为或导航相关的任何错误或警告消息。 bot_memory_usage 显示有关活动机器人模块和当前加载的导航网格文件的内存使用统计信息。高级梯子导航网格编辑修复(作者:Sajin) 高级梯子导航网格编辑指南(作者:Sajin) 高级梯子导航网格编辑指南(修订版)(作者:Sajin) 反恐精英下载与文件 反恐精英1.6专用WeedsBot v1.20 | 更多信息 CSBot非官方档案库