换一换
换一换 





这是为那些疑惑“‘Logic’方块有什么用,该怎么用”的人准备的指南。 1. “Logic”方块的种类 解释一下有哪些“Logic”方块,以及它们各自的功能。 1-1. “AND Logic Gate”(与逻辑门)
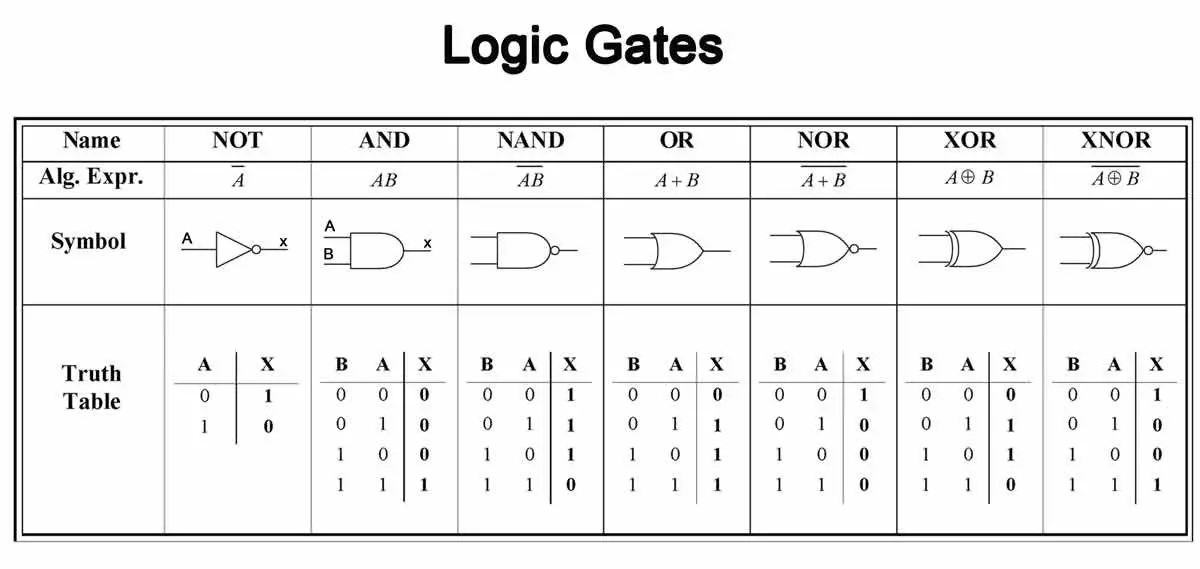
【与逻辑门】是字面意义上执行与运算的模块。当所有输入均为【0以上】或所有输入均为【0以下】时,会输出数值。 主要设置说明如下。
(1)和(2)是用于设置按键输入的部分。不过,虽然是AND(与门),但并非同时输入(1)和(2)的按键时才会输出值,而是输入其中任意一个按键就会输出值。 通常情况下,(1)的按键对应输入“1”,(2)的按键对应输入“-1”,但与其他输入组合时,会有一些特殊动作,请参考【1-4. 输入输出表】。 如果想将其作为纯粹的AND(与门)电路使用,建议将(1)、(2)设置为“None”(无),不使用这两个按键。 (3)是输出的大小,输出值为输入值乘以(3)的数值。也就是说,若将此设为“-1”,输出就会反转。此外,输入值的大小与输出完全无关。 需要注意的是,“输入1”和“输入2”的正负必须相同。即当“输入1”为“1”而“输入2”为“-1”时,不会有任何输出。 1-2. “或逻辑门”
【或逻辑门】是能执行OR运算的方块。当任意输入为【0以上】或【0以下】时,会输出数值。其设置与【与逻辑门】完全相同。
“输入1”和“输入2”也必须正负相同。 详情请查看“1-4. 输入输出表”。 1-3. “异或逻辑门(XOR Logic Gate)”
【异或逻辑门】是字面意义上执行异或运算的模块。仅当其中一个输入为非"0"值时,才会输出值。其设置与【与逻辑门】完全相同。
“输入1”和“输入2”的正负必须相同。 详情请参见“1-4. 输入输出表”。 1-4. 输入输出表 输入1 输入2 按键输入 AND OR XOR 0 0 - 0 0 0 1 0 - 0 1 1 0 1 - 0 1 1 1 1 - 1 1 0 1 -1 - 0 0 0 -1 -1 - -1 -1 0 - - 0 0 0 0 - - 1 1 1 1 - - -1 -1 -1 -1 - - 双按 0 0 0 1 0 0 0 1 1 1 0 1 0 1 0 1 1 0 0 1 0 1 1 1 1 1 0 1 1 -1 1 1 0 -1 -1 1 -1 -1 0 -1 -1 -1 -1 -1 0 1 -1 1 1 1 0 1 -1 -1 -1 -1 0 1-5. 距离传感器
【距离传感器】是一种能够检测前方一定距离内是否存在方块或墙壁等物体的传感器方块。当输出有效时,传感器正面整体会发光。下面将对主要设置进行说明。

(1)是检测距离。当设定距离范围内存在物体时,输出将生效。此外,方块长度1单位约为0.3米。 方块数1234...10最大非检测(米)0.30.60.81.1...2.6 (2)是输出大小。【距离传感器】只要范围内有物体,就一定会返回该值。输出不会因距离而改变。 (3)是输出反转。当范围内不存在物体时输出数值。 此外,【活塞】即使处于收缩状态,也会被判定为存在最大长度。如果想要检测【活塞】的长度,请注意这一点。 1-6. 速度传感器

【速度传感器】是用于检测速度的传感器模块。正面面板的边框会显示速度仪表,当仪表达到满值时传感器生效。以下是主要设置的说明。

(1)为检测速度。当速度达到该设定值以上时,将输出数值。 (2)为输出大小。与往常一样,仅为开关状态,输出值始终为此处设定的值。 (3)为输出反转。当速度低于设定值时,输出数值。 此外,速度检测仅针对正面面板上标注的箭头方向进行测量。因此,如果想要将前进速度作为触发条件,但传感器却设置为与前进方向横向,可能无法正常工作,请注意。 1-7. 高度传感器
"Altitude Sensor"是高度计(高度传感器)。全面面板会以整数显示高度。以下是主要设置的说明。

1. 参数说明 (1) 为检测高度。当高度达到该值及以上时,输出数值。 (2) 为输出大小。数值保持恒定不变。 (3) 为输出反转。 2. 使用方法 接下来,说明【Logic】模块的基本使用方法。 2-1. 输入输出方法 说明【Logic】模块的输入输出方法。 不过,传感器类模块没有输入,因此仅对【AND】【OR】【XOR】模块的输入进行说明。 首先,从输出方法开始说明。 选择【Logic】模块并打开【configure】后,其他【Logic】模块及可操作模块上方会显示滑动条。
点击此滑块会向右滑动并变为绿色,这样就设置为输出目标了。可以指定多个输出目标,接收方也能从多个【Logic】模块接收输出。 另外,请注意将可操作模块指定为输出目标时,该模块自身的操作设置仍会保持有效。反之,如果运用得当,一个操作模块也可以用于多种用途。 接下来是输入方法,正如第1章所说明的,每个模块都可以设置按键输入,实际上除此之外没有其他输入功能。因此,输入时需要接收来自其他【逻辑】模块的输出。 简单举例说明。尝试将LT和RT按钮的【与】输出到灯光。 如前所述,即使在【与逻辑门】的按键设置中分配LT和RT按钮并同时按下,也无法获得与输出。 因此,首先需要为LT和RT按钮分别准备一个用于输入的【逻辑】模块。以下为了与【与】区分,使用了【或逻辑门】。

接下来设置【与逻辑门】,并从各个【或逻辑块】进行输出设置。
最后设置【尾灯】,并从【AND】模块进行输出设置。另外,请在【尾灯】的【配置】中勾选【按压点亮】。


操作完成。请确认同时按下LT和RT键可以开关灯光。
3. 使用示例 以下是实际制作机械时的使用示例。后续可能会根据需要补充更多内容。 3-1. 初始开启 在制作可变形载具时,【活塞】可以通过【配置】来设定初始位置,这很方便,但像【转向铰链】这类旋转操作模块无法设定初始位置,可能会带来不便。 因此,这里将介绍一种能从初始状态(乘坐前)就输出开启信号,并可进行开关切换的电路。 接下来要制作的是实现以下功能的电路:1) 无输入时生效 2) 通过RB按钮切换启用/禁用 首先,若要在无输入时发出On信号,可使用【距离传感器】模块。
若将其他方块相邻放置在【距离传感器】的面板表面,或设置在传感器距离范围内,【距离传感器】将始终输出开启信号。该信号在设置完成后、未进入载具前就会开始输出,十分便利。 不过,仅靠这样无法切换开关状态,因此需要设置用于输入的【逻辑】方块,并通过【异或逻辑门】进行连接。请设置用于输入的【或逻辑门】方块,然后将【距离传感器】和【或逻辑门】的输出连接至【异或逻辑门】。
这样就完成了。因为是简单的回路,所以应该没什么问题。 3-2. 车辆-空中/水上操控模式切换 在制作既能当飞机又能当船使用的车辆时,可能会出现以下情况:作为车辆行驶时,用于操控的机翼或发动机启动会造成干扰;相反,在空中或水中时,车辆的转向装置会造成干扰。 因此,这里将介绍用于切换车辆操作模式与空中/水中操作模式的回路示例。 接下来要制作的是实现以下功能的回路。1. 按LB键切换模式 2. 左摇杆的操作会根据模式发生变化 3. 车辆转向在禁用时可操作,启用时不可操作 4. 飞行用操舵(机翼的上下)在禁用时不可操作,启用时可操作 由于情况稍显复杂,下面将使用表格等方式进行说明。 首先,设置用于输入的【Logic】模块。放置三个【OR Logic Gate】(A、B、C),并分别按如下表所示进行设置。
(1)按键(1)“切换”(2)按键(2)“切换”(3)ALBONone-1.0 BLBONone--1.0 C→-←-1.0 接下来制作飞机用的操舵回路。放置两个【与逻辑门】(D、E)和一个【或逻辑门】(F),并按以下方式设置输出目标: A→D B→E C→D、E D→F E→F F→操舵模块
这样飞行用的操舵回路就完成了。 接下来是车辆用的回路,由于输入等【逻辑】模块可以通用,所以只需再设置两个【异或逻辑门】(G、H)和一个【与逻辑门】(I),并按以下方式设置输出目标: C→G、H D→G E→H G→I H→I I→车辆转向模块
这样设置后,只有在禁用状态下才能操作车辆,至此完成。 我不会逐一解释每个动作,请实际制作并确认效果。 另外,我已将测试机器以【logic-gate test machine】的名称注册到创意工坊,如有需要可以查看。 3-3. 悬浮 使用【悬浮块】进行浮起时,在水上速度降低后效果会消失,导致沉没,不够稳定。因此,这里介绍一个通过【万向喷射器】进行辅助,使水上也能稳定浮起的电路示例。 不过电路本身并没有什么特别的地方。按照以下方式操作:在悬浮块(Hover Block)的四角(必要时可增加数量),将 Gimbal Jet(万向喷射器)和 Altitude Sensor(高度传感器)与悬浮块保持相同高度并排摆放并连接。高度设定为0.7米左右即可。另外,不要忘记启用“Trigger Below”(下方触发)功能。

另外,为了让上述机体更容易理解,输出也连接到了【尾灯】(Taillight)。