X-Plane 10 Global - 64 Bit



《X-Plane 10 Global - 64 Bit》这款模拟器最有趣的地方在于能在真实天气、真实时间下,使用真实导航设备进行飞行。如果只是开启“飞机位置”选项在地图上飞行,那就会变成一种简单枯燥的娱乐活动,与现实生活中在空域进行真实导航毫无关联。实际上,飞行员在没有领航导航设备的情况下根本无法确定自己的位置。尤其是在远程和高空飞行的飞机上。通过窗户观察并依靠地面上的“固定”地标来辨别方向是不可能的。 本教学指南旨在介绍如何真正依靠每架飞机上都实际配备的仪表进行飞行。当我们通过设置中的【滑块】调整好所需频率后,垂直线条会偏离其初始位置。此时,需要旋转VOR设备上的方向调节旋钮,使垂直线条重新回到中心位置。能让线条回到中心的度数方向,就是我们需要飞行的目标方向。同时,设备上始终有一个小三角形,它会显示你沿选定方向的飞行状态,即你是正在飞离VOR台还是正在飞向VOR台。此外,在像 Baron 飞机这类先进飞机的显示屏上,会显示到VOR台的距离,单位为海里(nm)。这非常方便,因为你可以快速判断剩余燃油是否足够飞到该VOR台以及后续航线。当然,甚高频全向信标(VOR)也可以像上述的无方向性信标(NDB)一样用于在跑道(ВПП)着陆。但通常不需要这样做,因为如果机场配备了甚高频全向信标(VOR),那么它也会有仪表着陆系统(ILS)下滑道。 仪表着陆系统(ILS) 这个设备,即所谓的着陆下滑道,通常是上述甚高频全向信标(VOR)的一部分。它实际上和甚高频全向信标(VOR)是同一个设备,但使用方式略有不同。仪表着陆系统(ILS)的频率通常为109.25、110.50等。这些频率也会标注在领航图上,并标有着陆方向箭头。频率显示在指针尖端。将频率调整到选定值后,两条线——垂直线和水平线——都会偏离中心交叉点。你的任务是再次将它们交叉到中心。该怎么做?要实现这一点,你需要在接近跑道时操控飞机,要知道垂直线表示跑道方向,水平线则显示需要保持的高度,以便在距离跑道起点一海里处能正确看到跑道。着陆始终通过目视进行。这是由于在不同天气条件下,设备无法确定机轮与跑道接触的确切时刻,以及涡轮螺旋桨发动机所需的刹车力和反推力(否则飞机会偏航,可能滑出跑道或损坏起落架减震器等)。只有人类飞行员才能凭借其数千小时飞行积累的着陆技能完成着陆操作。因此,存在无法飞行的天气状况,当能见度在1英里及以内无法看到跑道时,任何机场都禁止着陆。此时只能从该机场起飞,因为起飞相对简单,只需获得机场管制员的指令即可。关于起降的注意事项 另外,在每次起降前,请查看风向数据(点击地图上标有机场或 aerodrome 名称的小圆圈)。如果风力较强(30-50 英尺/秒),请选择逆风跑道降落。如果在您选择的 aerodrome 上找不到这样的跑道,最好前往风力较小的地方。强风时,轻型飞机(5 吨以下)常常会被吹离跑道,从而导致事故。强风起飞建议:逆风加速,可在机场任意位置(甚至不在跑道上)开始加速,当达到起飞所需速度的50%以上时,再驶入跑道。为此,许多多风机场都设有与跑道成一定角度的引道(例如瓦加尔机场),应从这些引道开始起飞。这是因为当飞机刚刚达到20-40%的起飞速度时,它就会被吹向一侧,之后几乎总会发生事故。 结论 现在,请关闭地图上的【飞机位置】选项,然后出发!像在现实生活中一样判断你的飞机位置,按照你预先规划的航线飞行,最重要的是在降落时不要出错,ILS系统将帮助你做到这一点。如果你在现实生活中登上一架真正的飞机,你会很快熟悉领航员的工作,在需要时能为飞行员提供帮助。生活中什么事都有可能发生! 仪表 众所周知的GPS导航仪只能提供大致的方向指引,无法实现精准着陆。借助它,你只能大致沿着飞行员最初规划的航线飞行。这非常有趣,而且不需要任何剧情和飞行员生涯。如果你能完全掌握仪表飞行,就能从飞行中获得最大的乐趣。 夜间飞行以及在雾、云、雨、雪中飞行时,**一定要通过领航员地图控制飞行高度**,否则很容易撞山,尤其是在阿尔卑斯山脉。为了掌握山区着陆,建议购买DLC卢加诺机场。如果您能学会在夜间和恶劣天气下降落在卢加诺,那么就可以放心购买X-Plane Pro,花费1000欧元,通过互联网聘请教练并考取飞行员执照。祝您成功!这里我们不会描述每位拥有GPS导航仪的车主都知道的那些简单操作。因此,我们来看看民用航空中实际使用的设备。 航空领域主要使用两种导航设备——NDB(无向信标)和VOR(甚高频全向信标)。此外,还会使用ILS(仪表着陆系统——甚高频全向信标的一种变体)。NDB(部分机型中为ADF) 该仪表为带指针的表盘样式。若要沿此信标航线飞行,需拿出领航图(打开对应的位置选项卡,而在模拟真实飞行时,需关闭“飞机位置”选项),读取附近信标的频率(通常为三位整数频率,例如303、345等)。接下来,需要使用飞机仪表板上的调节旋钮来设置所需频率。如果到信标的距离在可通过信号幅度识别的范围内,那么原本处于关闭状态(始终向右指向90度)的指针就会转向信标方向,飞机需要朝着该方向飞行。当飞机飞越信标时,会发出独特的提示音——“哔”声,此时仪表盘上的蓝色指示灯通常会亮起。之后指针会旋转180度,这意味着需要寻找新的地标或转向预先设定的其他地标。这些信标也常用于机场着陆。信标通常设置在跑道(ВПП)的方向上。当飞机下降至2000-3000英尺(1英尺=0.3米)时,无论之前飞行在何种雾中,该高度的能见度通常都会转好。如果在进入所选NDB导航台时正确完成了定向,那么你很可能会在3-5海里(nm)的距离处看到跑道。白天识别跑道比夜晚更困难,因为夜晚的跑道会被黄色灯光良好照亮,并且通常在着陆方向上设有白色的“闪电箭头”式跑道灯。左侧会有垂直于跑道的红色条状灯光。右侧则有相同的绿色条状灯光。 白天很难看到跑道,因为它和周围环境一样都是灰色的。尤其是当你只是朝着NDB导航台飞行,飞过之后却没有朝着着陆方向,而是与跑道成很大角度时,白天就更难看到跑道了。这种情况下,必须放弃着陆,在2-3千英尺的高度平稳盘旋。然后重新对准NDB,不过要考虑第一次进近的情况。 甚高频全向信标 通常这个设备也是表盘形式,但带有交叉的白色线条。不过也有采用单条垂直线(如C-150飞机)或显示屏上的箭头(如阿凡提飞机)的形式。再次拿起领航图,找到甚高频全向信标的频率(通常是带百分位小数的三位数,例如117.25、122.90等)。

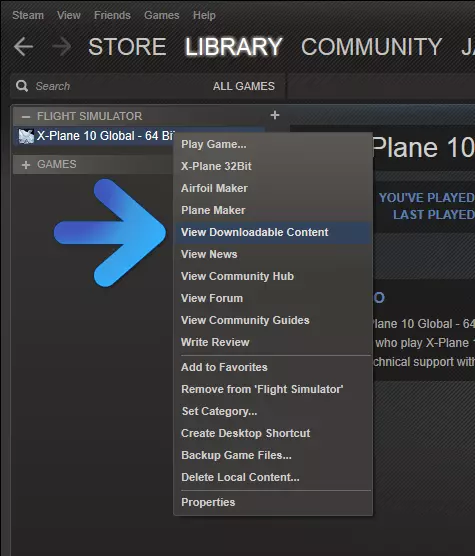
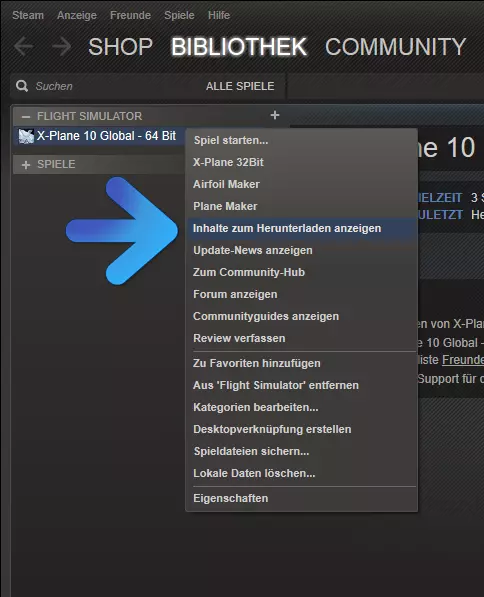
关于【自定义 scenery】文件夹和【scenery_packs.ini】文件的说明 自定义 scenery 文件夹: 以下是关于自定义 scenery 文件夹的一些说明。 自定义 scenery 文件夹是《X-Plane 10 Global - 64 Bit》中插件场景的存放位置。 它位于 X-Plane 10 主文件夹的直接目录下。 如何找到该文件夹: 启动 STEAM。切换到库页面。 在库中右键点击《X-Plane 10 Global - 64 Bit》。 选择属性选项。 在弹出的窗口中选择本地文件。 然后选择浏览本地文件。 此时你将进入 X-Plane 10 主文件夹。 所有插件场景以及所需的库文件都应放入此自定义 scenery 文件夹中。 带有自动安装程序的插件(例如机场插件)也会安装到这里。安装完成后,您会在该目录中看到一个或多个条目(文件夹)。为了让《X-Plane 10 Global - 64 Bit》能够按正确顺序加载额外安装的场景,此目录下有一个名为scenery_packs.ini的文件。重启《X-Plane 10 Global - 64 Bit》后,该文件会包含“Custom Scenery”目录中所有现有附加场景的条目。《X-Plane 10 Global - 64 Bit》会按照scenery_packs.ini中条目的顺序加载场景。因此,scenery_packs.ini是确保场景加载顺序正确的相关文件。这个ini文件可以用简单的编辑器进行编辑。这样就可以轻松更改插件场景的顺序(通过剪切并粘贴到其他位置)。 以下是scenery_packs.ini文件的一个可能片段: SCENERY_PACK Custom Scenery/Aerosoft - EDDH Airport Hamburg/ SCENERY_PACK_DISABLED Custom Scenery/Aerosoft - EDDH Airport Hamburg/ SCENERY_PACK Custom Scenery/Aerosoft - EDDK Cologne/ SCENERY_PACK Custom Scenery/Aerosoft - EDDM Munich/ SCENERY_PACK Custom Scenery/Aerosoft - EDDS Stuttgart/ SCENERY_PACK Custom Scenery/Aerosoft - EDDT Berlin Tegel/ SCENERY_PACK Custom Scenery/Aerosoft - EDDV Hannover/ SCENERY_PACK Custom Scenery/Aerosoft - EDFH Airport Frankfurt-Hahn/ SCENERY_PACK Custom Scenery/Aerosoft - EDLP Paderborn-Lippstadt/ ...等等 ...SCENERY_PACK 自定义 scenery/KSEA 演示区域/ SCENERY_PACK 自定义 scenery/KSEA 演示地形/ SCENERY_PACK 自定义 scenery/LOWI 演示区域/ SCENERY_PACK 自定义 scenery/OpenSceneryX/ SCENERY_PACK 自定义 scenery/Truscenery - EFHV 机场/ SCENERY_PACK 自定义 scenery/Truscenery - EFHV 自动生成景物/ SCENERY_PACK 自定义 scenery/Truscenery - EFHV 覆盖层/ SCENERY_PACK 自定义 scenery/Truscenery - EFHV 照片级 scenery/ SCENERY_PACK 自定义 scenery/YSSY 悉尼机场照片级 scenery/ SCENERY_PACK 自定义 scenery/yy_欧洲树木农田/ SCENERY_PACK 自定义 scenery/yy_美国树木农田/ SCENERY_PACK_DISABLED 自定义 scenery/yy02-Urban_Maxx_Extreme_V2_3D/ SCENERY_PACK_DISABLED 自定义 scenery/germany-osm2xp202-13-04-2012-geofabrik/ SCENERY_PACK_DISABLED 自定义 scenery/Osm_Europe_osm+only/ SCENERY_PACK 自定义scenery/new_zealand_overlay/ SCENERY_PACK Custom Scenery/new_zealand/ SCENERY_PACK Custom Scenery/hd_global_scenery/ 每个场景配置都应按以下方式出现在scenery_packs.ini中: 首先是机场,然后是OSM数据,接着是区域场景(除非某个附加场景在其安装说明中有其他规定),最后是可能的地形网格文件。 例如: 1. 机场 2. 区域场景(例如Alpilotx的新西兰场景)或机场集合…… 3. OSM数据(例如World2XPlane) 4. 库文件(Libraries)、其他附加组件。库文件在scenery_packs.ini中的位置无关紧要。 5. 照片场景 6. 地形网格数据(例如Alpilotx的HD Scenery Mesh v3)…… 关于如何在scenery_packs.每个条目都以SCENERY_PACK开头,如果你不想显示某个 scenery(即想禁用它),则以SCENERY_PACK_DISABLED开头。这样你可以隐藏某个 scenery,而无需将其从Custom Scenery文件夹中删除。例如,上面的第二个条目是标准机场“Aerosoft - EDDH Hamburg”,我已将其禁用,因为我使用的是付费机场“Aerosoft - EDDH Airport Hamburg”。删除汉堡标准机场只会导致在X-Plane 10更新时重新安装该标准机场。启动X-Plane 10时,系统会检查Custom Scenery文件夹中是否有新的scenery。如果有,这些scenery将被写入scenery_packs.ini的开头。如果某些场景文件放错了位置,你需要用简单的编辑器在ini文件中对其进行相应的移动。 自定义场景文件夹(即scenery_packs.ini)内可能需要的库文件(例如OpenSceneryX)的位置并不重要。 它们可以放在任何位置,只要在安装需要这些库的场景时它们存在即可。否则,在这些区域会出现场景错误。 也可以将场景文件不放在自定义场景文件夹中(例如放在另一个硬盘上),但仍然在《X-Plane 10 Global - 64 Bit》中使用。这时,你需要在自定义场景文件夹中创建一个指向场景文件位置的链接目录,然后将该条目再次添加到scenery_packs中。相应地移动这些文件。 Windows系统下的操作步骤: 1. 在“其他”文件夹中右键点击场景文件(文件夹),将其拖动到“Custom Scenery”文件夹中。 2. 右键释放,然后选择“在此处创建快捷方式”。 3. 此时,X-Plane 10安装目录的“Custom Scenery”文件夹中会出现一个“快捷方式文件夹”。 4. 启动X-Plane 10后再关闭。此时,Scenery_packs.ini文件的开头会出现如下条目:SCENERY_PACK I: Zusatzszenerien <场景名称>/ 其中,I代表另一个硬盘,场景文件存储在该硬盘的“Zusatzszenerien”文件夹中。<场景名称>会显示为相应的场景名称。 好了,现在开始享受“整理”的乐趣吧……

在《X-Plane 10 全球版》中校准USB连接的摇杆 在《X-Plane 10 全球版》中校准摇杆 在《X-Plane 10 全球版》中,你能够非常精确且多方面地校准摇杆。 你还可以配置油门、方向舵踏板、刹车或驾驶盘等。 仅使用随附的驱动软件对硬件进行校准是远远不够的。 有时,这种操作系统层面的校准会造成干扰,它仅对操作系统有效。 因此,为了能正确控制飞机和直升机等,必须在《X-Plane 10 全球版》模拟器内进行校准。 以下是使用《X-Plane 10 全球版》校准已连接的USB摇杆的步骤: 轴: 首先,你需要启动《X-Plane 10 全球版》。将鼠标移动到屏幕顶部,点击【设置】,然后选择【摇杆与设备】。 这会打开一个包含多个标签页的窗口,例如【轴】【死区】等。 进入【轴】标签页。 现在将摇杆完全前后移动。在移动的显示项旁的菜单中,选择【俯仰】。 将摇杆完全左右移动。在移动的显示项旁的菜单中,选择【横滚】。 左右转动摇杆(若有此功能)或左右踩踏方向舵踏板(若配备)。在移动的显示项旁的菜单中,选择【偏航】。 用同样的方法可以/需要校准更多轴:油门、螺旋桨、混合比、刹车(可能包括左右脚刹)等。 所有已定义的轴现在都应显示为绿色。所有剩余的红色轴必须设置为【无】(无功能)。它们将保持红色。 这一点很重要。否则,这些“红色”轴会向X-Plane发送信号,导致飞机失控。 现在依次移动所有已定义的(绿色)轴至其整个行程范围,然后将其置于中间位置(如油门归零等)。 点击【以此位置为中心】按钮。 这样,轴就完成了定义和校准。 点击【校准摇杆硬件】按钮会重置设置,之后必须重新校准。 【死区】选项卡。 控制轴的其他设置需在此选项卡下进行。 有些摇杆在未移动时也会发送信号。此时,你可以通过将【死区】滑块调整到稍高的百分比值来阻止这些信号。然后,你可以通过点击【居中操纵杆和踏板并点击此按钮】来完成零区校准。 窗口上部区域的其他可能设置如下: 左侧的3个滑块用于调节俯仰、横滚和偏航这3个轴,并强制《X-Plane 10 Global - 64 Bit》为飞行员提供辅助。当然,最高真实度对应0%的辅助值。 右侧的3个滑块控制操纵杆移动时,俯仰、横滚和偏航这3个轴的作用效果。如果控制值设为0%,那么控制信号会根据操纵杆相应轴的线性位移发送到《X-Plane 10 Global - 64 Bit》中。例如,俯仰轴的一半偏转量会导致飞机控制面产生一半的偏转。百分比数值越高,意味着摇杆轴在小幅度偏转时灵敏度越低(便于微调),而在大幅度偏转时,飞机的反应会更强烈。默认值25%是一个不错的数值。要找到最适合个人的设置,只需多尝试即可。 配置摇杆按钮: 操作方式与摇杆轴相同。 打开【设置】-【摇杆与设备】菜单。 进入【按钮:基础】或【按钮:高级】选项卡,其中包含所有可用功能。 首先按下你想要配置的摇杆按钮。 然后在菜单中选择所需功能,并点击相应的单选按钮。 例如: 按下你想用于向左查看视角的按钮。 然后进入【按钮:高级】选项卡,并设置【通用】单选按钮。在此处设置单选按钮【rot_left】。 重要提示: 完成校准后,必须以正常方式关闭X-Plane,这样设置才能永久保存。 正常方式指:通过菜单“文件” - “退出”关闭《X-Plane 10》(不要使用窗口的关闭按钮)。 并且,切勿在菜单“设置” - “操作与警告”中勾选“放弃对偏好设置的更改”按钮。 X-Plane会将设置保存在“preferences”文件夹中,该文件夹位于“Output”文件夹内。 建议对此文件夹进行备份。 祝飞行顺利,一路平安。 海因茨

在《X-Plane 10 Global - 64 Bit》中校准操纵杆轴并配置按钮。 轴校准 在《X-Plane 10 Global - 64 Bit》中,可以对所用操纵杆的轴进行非常精确且多方面的校准。 当然,这也适用于油门杆、方向舵踏板、刹车或驾驶盘等。 绝对不要仅使用随附软件对所用操纵杆进行硬件校准。 这通常甚至会造成干扰。这种校准仅适用于操作系统和硬件本身。 为了能够合理地操控飞机和直升机等,必须在《X-Plane 10 Global - 64 Bit》模拟器内进行校准(因此请暂时不要安装额外的驱动程序)。进行设置时,务必留出足够的时间和保持耐心。这样之后进行“模拟”操作时会更加轻松。以下是模拟器中操纵杆的设置步骤: 启动《X-Plane 10 Global - 64 Bit》。 将鼠标移至屏幕顶部边缘,选择“设置” - “操纵杆、键盘和设备”。 此时会打开一个包含多个选项卡的窗口:轴、死区等。 选择“轴”选项卡。 将操纵杆完全前后移动。 在菜单中,在移动的显示项旁选择“俯仰(Pitch)”。 将操纵杆左右移动。 在移动的显示项旁选择“横滚(Roll)”。 旋转操纵杆(如果具备此功能)或踩踏方向舵踏板(如果已连接)左右移动。除了移动显示外,选择偏航(Yaw)。 其他轴也需要以相同方式进行定义: 油门杆(直升机为总距杆!)、螺旋桨轴(prop)、混合比轴(mixture)、刹车(可能包括左刹车和右刹车/脚刹)等。 所有已定义的轴现在必须显示为绿色。 所有剩余的红色轴必须设置为无(无功能),它们将保持红色。 如果不是这种情况,则必须在红色显示旁边的菜单中相应选择。 否则,这些“红色”轴会向X-Plane发送信号,导致飞机操控故障。现在请再次依次移动所有已定义(绿色)的轴,使其经过整个活动范围,然后将其释放到中间位置(如推力杆置于零位等)。 现在点击【在此定义中点】。 这样轴就完成了定义和校准。 点击【摇杆硬件校准】会导致设置重置,之后必须重新校准。 【零区】选项卡。 控制轴的其他设置必须在【零区】选项卡下进行。 有些摇杆即使在未被移动时也会发送信号。这种情况下,可以通过将【零区】滑块设置为稍高的百分比值来阻止这种情况。在此处,设置完死区(较新型号的摇杆可保持0%)后,需点击【居中操纵杆和踏板...】完成校准。 窗口上方区域的其他可能设置如下: 左侧的3个滑块用于指示X-Plane根据百分比值对飞机的3个轴(俯仰、横滚、偏航)进行辅助控制,即最终为“辅助”飞行员。此处最高的真实度当然是0%。 右侧的3个滑块用于控制摇杆移动时3个轴(俯仰、横滚、偏航)的作用效果。当调节器设为0%时,摇杆各轴的偏转量会以线性方式向X-Plane发送控制信号。例如,俯仰轴偏转一半,飞机的控制面也会偏转一半。较高的百分比值会降低摇杆轴在小偏转时的灵敏度(便于精细操控),而在较大偏转时飞机的反应会更强烈。 标准值25%通常可以保持不变。 要找到个人最佳设置,只能通过不断尝试。 按钮配置 可通过“设置”菜单 - “摇杆、键盘和设备”进行操作。 在上述菜单中,选择“摇杆按钮”选项卡。现在会出现一个包含多种常规选项的页面。 左上角有一个白色方框,里面显示一个三位数字。这是摇杆按钮或苦力帽(Hat)的数值,例如你刚刚按下的按钮或苦力帽的数值。 配置步骤如下: 1. 首先按下你想要配置的按钮。 2. 然后用鼠标选择该按钮之后要执行的功能,即点击单选按钮。此时单选按钮会变为绿色。 3. 这样,之前按下的摇杆按钮就被相应地分配了功能。 例如,若要使用苦力帽(Hat)改变视角,可将苦力帽向左移动。然后在上述“摇杆按钮”区域中,将单选按钮设置为“通用指令:向左平移”。向右看对应“向右平移”,向上看对应“向上倾斜”,向下看对应“向下倾斜”。 操作时,需先将摇杆朝所需方向移动一次,然后选择数值。通过这种方式,可以逐步为所有摇杆按钮分配功能。 如果“摇杆按钮”页面中未列出某个功能,请切换到下一页:“按钮:额外功能”。 遗憾的是,目前此页面中(如上文提到的)相同功能有时会有不同的名称。例如,这些全方位视角功能在“通用”栏中可能显示为rot_left、rot_right、rot_up、rot_down。 在此处还可以找到更多功能,它们按类别划分(因为功能数量很多)。左侧的白色方框仅显示被按下的摇杆按钮。在此处配置的步骤如下: 1. 首先按下要配置的摇杆按钮。 2. 然后用鼠标选择类别(中间区域),例如【引擎】。 3. 随后右侧区域会显示与所选类别(如【引擎】)对应的所有可选功能。 4. 在右侧区域用鼠标选择所需功能,例如【carb_heat_on】。 通过这种方式,之前按下的摇杆按钮就配置为【carb_heat_on】功能了。 Carb即化油器(Vergaser),Carb_Heat指化油器预热(Vergaservorwärmung)。 对于键盘命令的配置流程有所不同,请按照【键盘】选项卡中间下方区域显示的说明进行操作。当所有按键设置完成后,只需点击右上角的X关闭【摇杆、键盘和设备】窗口(注意:不要这样关闭X-Plane 10程序本身!)。 这样按钮就配置好了。 要永久保存这些配置,必须关闭X-Plane 10并重新启动。 但只有通过【文件】-【退出】菜单关闭X-Plane 10时,配置才能保存! 此外,在X-Plane 10的【设置】-【操作和警告】菜单中,请勿勾选【放弃偏好设置更改】选项,这样才能确保配置成功保存(适用于X-Plane 10.45版本)。 通过重复此过程,您可以随时更改按键设置。
一份能引导你逐步了解如何充分利用《X-Plane 10 全球版 - 64位》空中交通管制系统的指南。 简介 本次将是从关西国际机场(RJBB)到成田国际机场(RJAA)的短途飞行,我们将从国内18号登机口出发。为简化流程,我们将进行直飞,不包含标准仪表离场程序、标准仪表进场程序以及航路点。本指南假定用户已具备飞行模拟的基本操作知识。 如何找到正确的频率 获取所需频率的最佳方式是从机场航图中查找。有一款适用于Windows、Mac和安卓系统的应用程序,名为Sim Plates X。不过该应用价格较高,主要是为了使用方便。 还有一种更经济的获取频率的方法。这可以通过X-Plane本身实现。当你坐在飞机的登机口时,将鼠标移至屏幕顶部直至菜单出现。菜单出现后,点击【位置】按钮,然后点击【本地地图】。之后你会进入一个显示机场的界面,点击你的机场,右上角会出现频率列表,记下这些频率。 记下频率后,关闭窗口并前往无线电面板。进入COM1,设置ATIS频率并收听信息。根据该信息设置高度表。 飞行计划 有许多网站和程序可用于创建飞行计划。正如简介中所述,我们将直飞成田,因此无需使用任何此类程序。 前往你的飞行管理计算机。默认情况下,你应该已选中用于输入目的地机场ICAO代码的行。如果没有,请选中它。现在输入机场的ICAO代码。在本指南中,ICAO代码为RJAA。然后设置你的巡航高度。完成这些设置后,去设置你的自动驾驶仪。有时飞行管理计算机和自动驾驶仪的高度部分是相连的,这意味着你在飞行管理计算机中输入的任何内容都会自动输入到自动驾驶仪中。不过,你仍然需要设置速度和垂直速度。 完成设置后,在你从本地地图抄录的频率上联系放行。如果有两个频率,尝试其中一个即可。如果此方法无效,请尝试其他方法。然后打开ATC窗口。默认情况下,按Enter键(回车键)即可打开。点击【提交飞行计划】。在此处,你需要输入出发地ICAO代码(本示例中为RJBB)、巡航高度(本示例中为27000英尺,即飞行高度层270)、目的地ICAO代码(本示例中为RJAA),然后输入航线(本示例中因直飞,故留空)。 提交飞行计划后,会出现另一个选项,应该是【请求放行许可】。选择该选项,ATC会给出指令。按照指令操作,例如设置放行高度和应答机编码。完成这些步骤后,你就可以准备滑行了。 请求放行许可 滑行至起飞位置 现在,你已在FMC中设置好飞行计划,配置好自动驾驶仪,并获得了放行许可。接下来请求滑行。ATC会告知你滑行路线和方式。还会出现一条引导线。如果你使用了自定义 scenery(地景),该引导线可能会试图引导你穿过建筑物。大致朝着同一方向行驶,引导线会追上并自行修正。空中交通管制(ATC)可能会重新允许你滑行,只需确认并继续前进即可。 起飞和飞行中 到达等待线后,等待空中交通管制(ATC)将你移交给塔台。他们会告知你要调谐的频率。调谐至该频率,等待管制员给予起飞许可。获得起飞许可后,在跑道上对准方向,设置起飞推力,然后就可以起飞了。 一旦升空,空中交通管制(ATC)会将你移交给区域管制中心。确保尽快开始沿航线飞行,否则空中交通管制(ATC)会发出警告。空中交通管制(ATC)会确保你在整个飞行过程中保持在航线上。当你接近机场时,他们会开始给你下降指令。 进近 当你到达机场40海里范围内时,你将被引导进行目视进近。目前没有仪表着陆系统进近引导,但你可以自行决定切入航向道和下滑道。他们会帮你对准跑道,然后将你移交给塔台。 着陆 一旦你被移交给塔台,他们会给予你着陆许可。着陆后,你会被指示脱离跑道。脱离跑道后,你将被移交给地面管制。 滑行至登机口 联系地面管制后,他们会为你分配登机口,你可以沿着引导线滑行。请记住,如果你使用了自定义 scenery,飞机可能会尝试穿过建筑物。 总结 希望本指南能对你有所帮助。这是我的第一篇指南,请多包涵!欢迎任何反馈。