换一换
换一换 





飞机选择 首先需要选择一架带有自动驾驶功能的飞机。 主界面提供预览功能,可让你进入驾驶舱观察。部分飞机明显不具备自动驾驶能力,例如赛斯纳152、Savage Cub、Pitts Special S2S等。通常具备自动驾驶功能的飞机至少配备一块电子显示屏,且在其周围能找到类似【AP】(自动驾驶)字样的按钮。 尽管不同飞机的操作面板存在差异,但输入航路和自动驾驶的操作基本相似。游戏中大致可分为以下几种类型: Garmin G1000:代表机型为赛斯纳172(G1000)。 Garmin G3000:G1000的改进版,代表机型为TBM930,配备触控屏,操作比G1000更便捷。MCDU(空客、波音、塞斯纳奖状等机型) 本指南将会讲解在飞行过程的不同阶段如何使用以上系统来实现自动驾驶。 飞行计划 首先游戏中的航路分为两种:直飞和导航。 直飞很简单,就是从你当前所在的点出发,用GPS一条线导航到目的地,两点一线,无视任何预定的航路。在游戏中,地图上会显示一条深色的细线。一般来说直飞模式会覆盖导航模式的设定,优先级比导航高。该模式只能在进入游戏后由飞机上的航电系统设定。

导航是根据设定好的飞行计划,从一个路径点飞到下一个点,直至抵达目的地。这也是本文着重讲解的部分。起点和终点通常为两个机场,机场遵循ICAO(国际民用航空组织)的规定用四个字母表示。

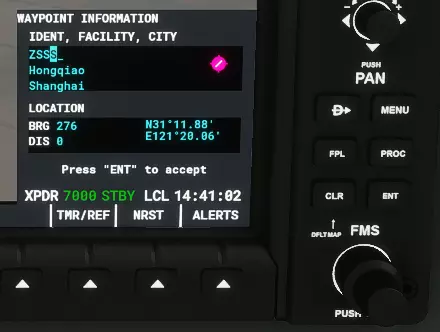
一个飞行计划包括: 离场机场 离场程序(可选) 途径点(可选) 进场程序(可选) 进近程序(可选) 进场机场 如果中间的可选项都没有,那么就跟直飞差不多,基本上也不太遵循现实中的航路。不过反正是游戏,喜欢怎么来就怎么来。 个人建议至少把进近程序设置好再起飞,进近程序可以帮助你把飞机调整到一个适合降落的姿态,可以极大提高降落不熟练的人(比如我)降落成功的机率。 离场/进场机场代号可以按V调出地图来看。比如我要从上海虹桥飞上海浦东,那么就是ZSSS飞ZSPD。

【在地图界面也可以看到起降机场】 离场/进场程序:进离场程序相当于飞机要遵循特定航线才能起飞/降落。起飞时执行离场程序,从跑道连接至多个路径点,再接入计划飞行的航路。注意离场程序包含跑道信息,若未找到想使用的起飞跑道,可尝试更换其他程序。进场程序类似,会将飞机导航至进近程序的起点。 当然,即使不设置进离场程序或未按程序飞行,空中交通管制(ATC)也不会干预。毕竟是游戏,无需过于较真。 途径点:途径点即飞行途中需经过的地点,通常包括各类航点(Waypoint)、信标乃至机场。例如,若想在飞行途中前往某机场上空观光,可将该机场添加至途径点中。游戏中提供了多种进近程序,包括甚高频全向信标测距仪(VOR DME)、仪表着陆系统(ILS)、区域导航(RNAV)、无方向性信标(NDB)等。其实前面的类型不重要,它只决定了航路会给你导航到什么程度,比如VOR DME和RNAV会给你导航到离跑道不远的地方,而ILS直接导航到跑道上等等。主要注意的是后面的跑道。一般来说,选择正确的跑道,再加上正确的导航频率,基本就可以降落所有支持仪表降落的机场了。实在不行,还可以关闭自动驾驶,接管飞机手动降落。

【带有离场/进场/进近程序的飞行计划】 输入航路 最简单的方法 在进入游戏之前的地球界面上直接选好所有航路和程序。 适用机型:任何飞机。 如果已经在游戏中,如何输入航路呢?那就需要用到航电系统了。 Garmin G1000拥有两块屏幕,左屏幕显示飞行姿态,右屏幕显示地图。其中屏幕右下角有一个旋钮,这个旋钮其实有两层,大的旋钮用于调整光标的位置,小旋钮则用于输入字母和数字(顺时针滚动时按0到9、A到Z的顺序循环,逆时针相反),同时小旋钮还可以向里按,用于显示/隐藏光标。

首先在左侧面板找到【FPL(飞行计划)】按钮。如果没有设置航路,里面应该是空的。如果设置了航路,按一下【MENU(菜单)】键,用大旋钮选中【删除飞行计划】,点【ENT(确认)】键删除。

现在航路为空,按一下小旋钮调出光标,即可看到光标在屏幕上闪动。

旋转小旋钮(注意按ENT键无效,具体原因未知),进入设置起点页面。在此页面,使用小旋钮输入机场代码的每一位,使用大旋钮切换到下一个字符的输入位置。全部输入完成后,按ENT键返回飞行计划界面。
点击小旋钮调出光标,依次输入中间的各个路径点以及最终的进场机场。


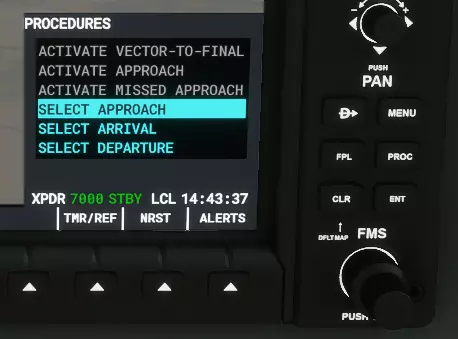
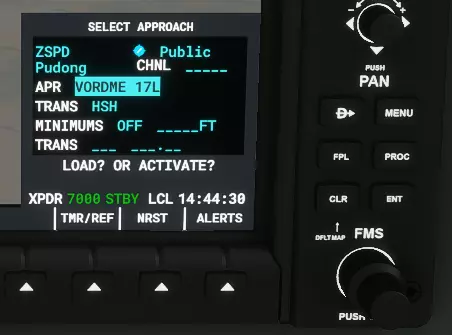
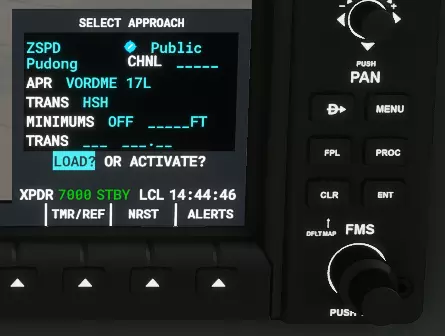
全部输入完毕后点PROC(进场/离场/进近程序),设置程序。同样用大旋钮调整光标位置,调整到需要更改的地方之后按ENT,在菜单中选择需要的程序后再按ENT选择。选择完毕后,点小旋钮调出光标,用大旋钮调整到LOAD(加载),点ENT加载到地图上。
最后按V调出游戏地图检查航路是否正确。
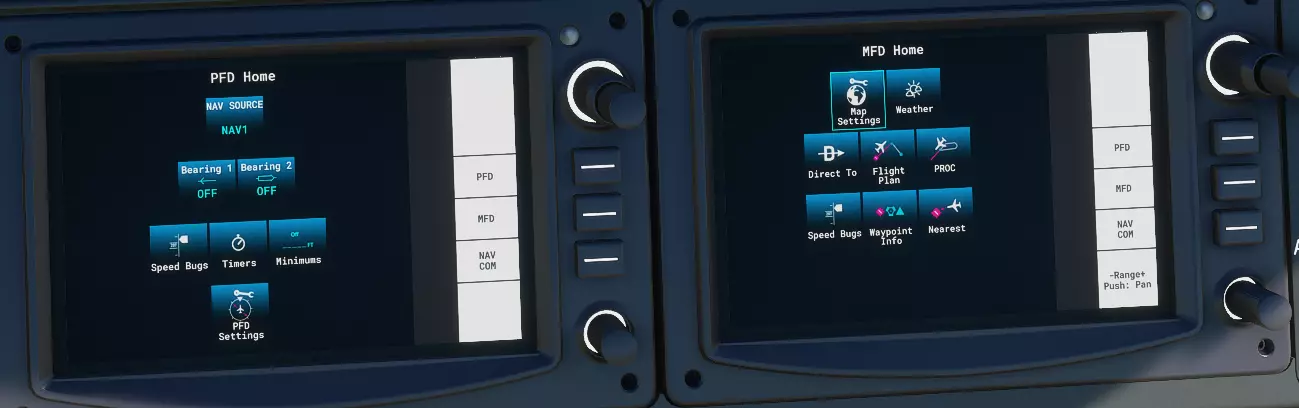
Garmin G3000 Garmin 3000则简单得多,毕竟触屏功能很实用。其中左右的屏幕是一样的,中间的用于显示地图。下面还有两个触屏,右侧的三个白块分别用于切换【PFD(主飞行显示器)】、【MFD(多功能显示器)】和【NAV/COM频率设置】。
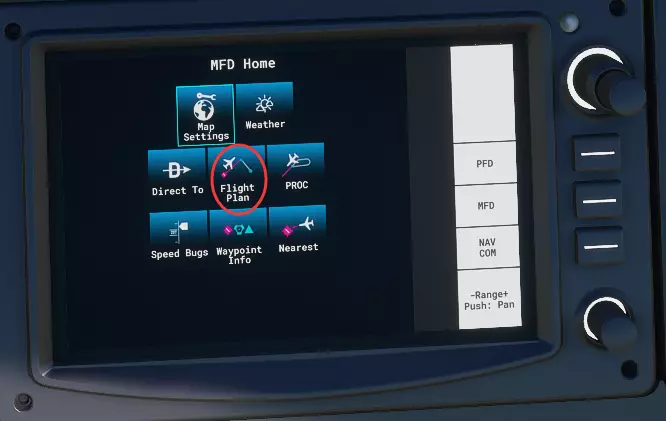
首先切换到多功能显示器(MFD),可以看到【飞行计划】,点进去。
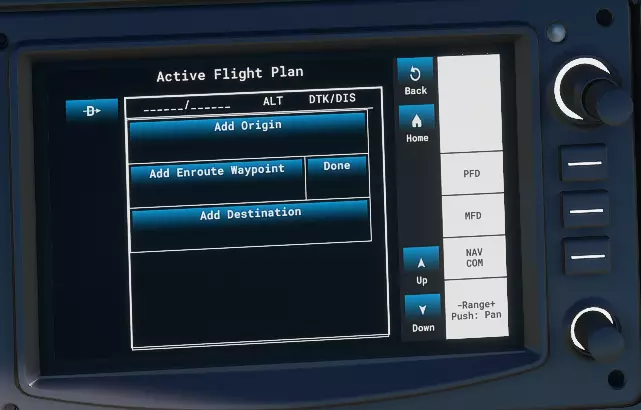
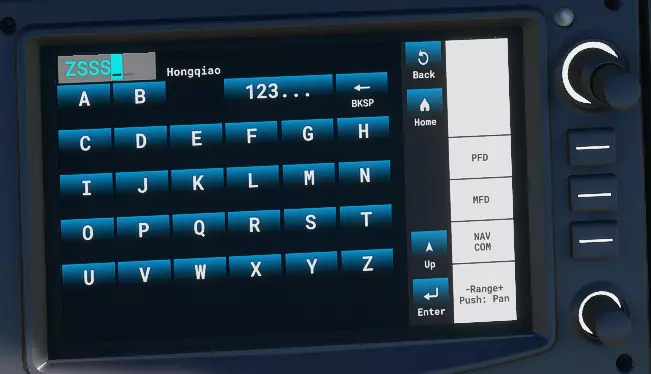
点击【添加起点】,可以选择离场机场。这里的选择更加方便,触控屏上会直接显示所有字母。
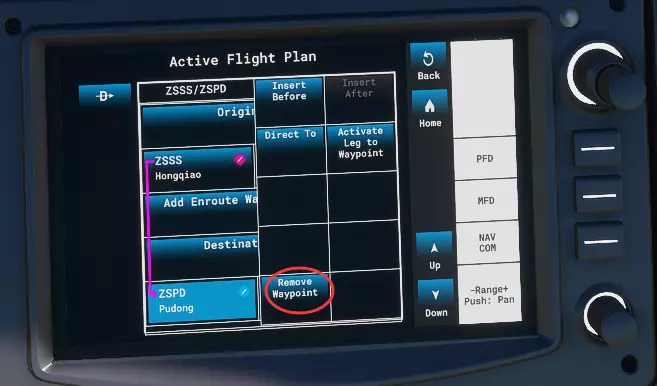
点击【添加终点】添加进场机场。 点击【添加航路点】可以添加途经的航路点。 如果写错了,点击已添加的航点,可在右侧菜单中删除。
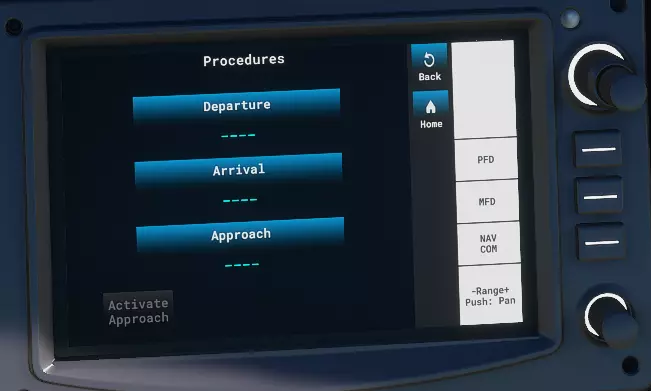
如果操作正确,中间屏幕会显示导航路径,按V键调出的游戏内地图也会显示。 按Home键返回主界面,然后选择【PROC(程序)】。可以看到【离场】、【进场】、【进近】程序的选项。
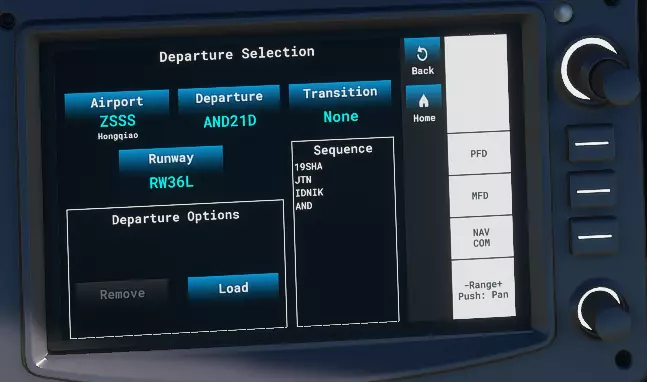
点击【Departure】。左侧【Airport(机场)】显示离场机场(需先设置好航线才能进行程序设置),中间【Departure】为离场程序,右侧【Transition】为过渡程序,【Runway】为跑道。
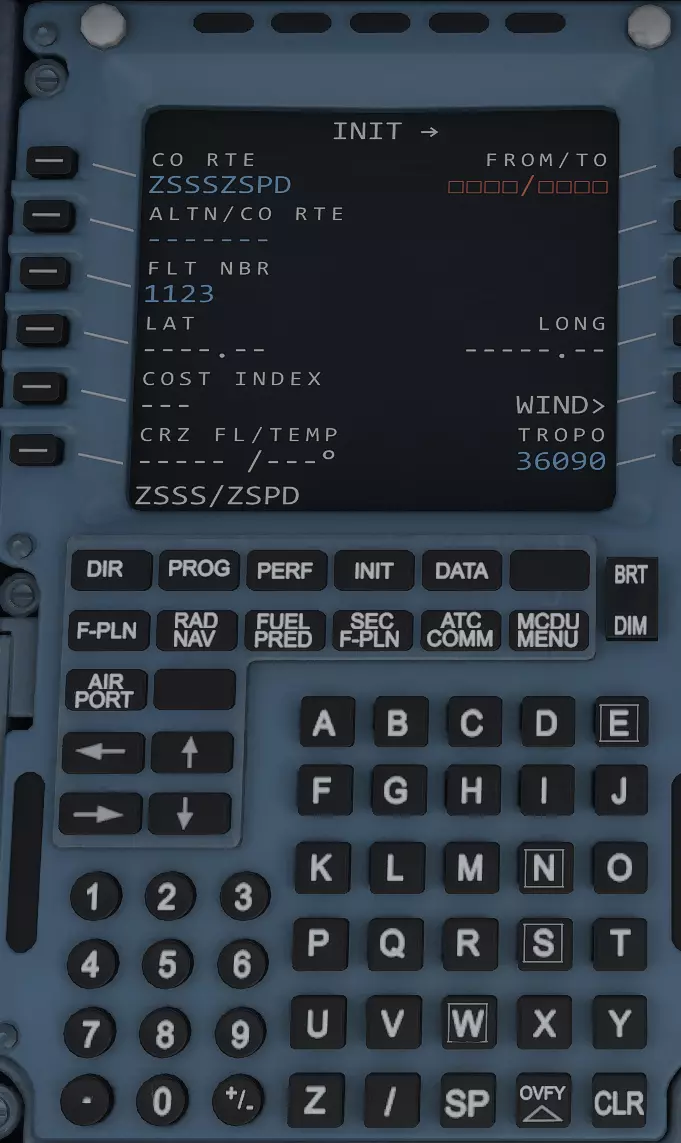
选择完毕后点击Load加载,地图上应该会有相应变化。 进场、进近程序的操作方法相同。全部设置完成后,按V键调出游戏地图,检查整条航路是否正确。 MCDU的设计逻辑如下:如果你需要输入某个数值,需先在面板上输入要填写的内容,然后点击侧边栏才能完成填写。 首先点击INIT(初始化)。图中显示的是点击后的界面。
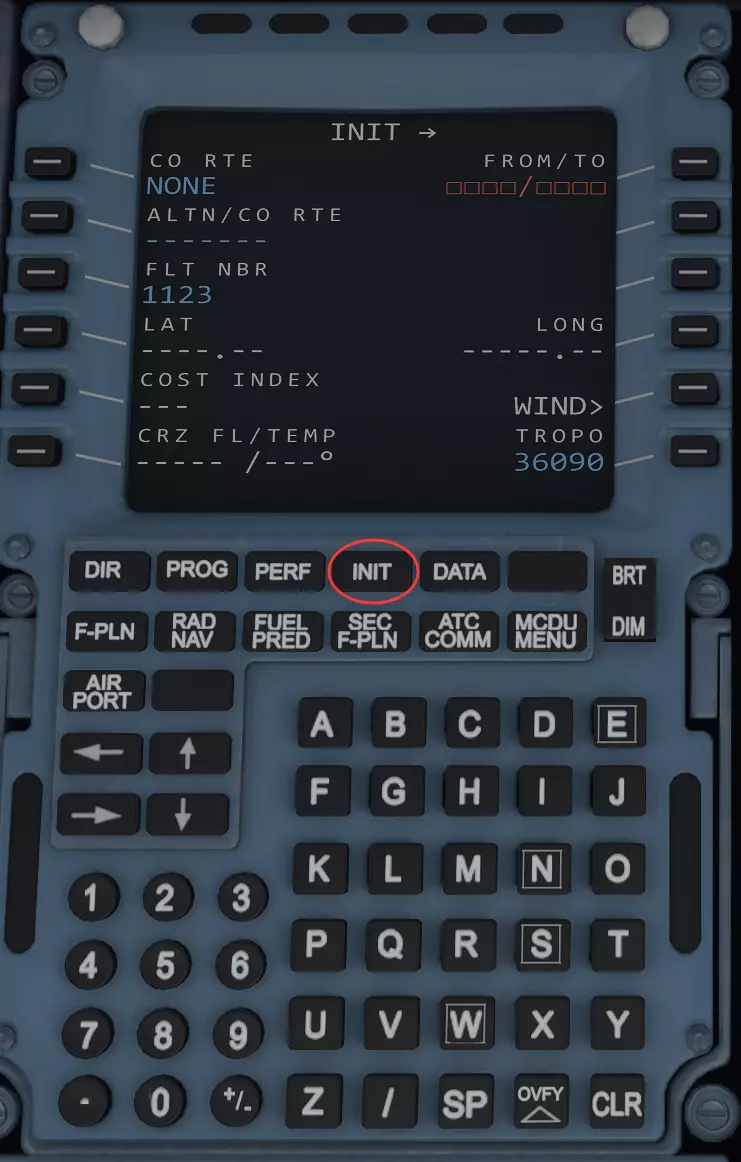
按【出发机场/到达机场】的格式输入,例如【ZSSS/ZSPD】,然后点击右上角的【FROM/TO】。
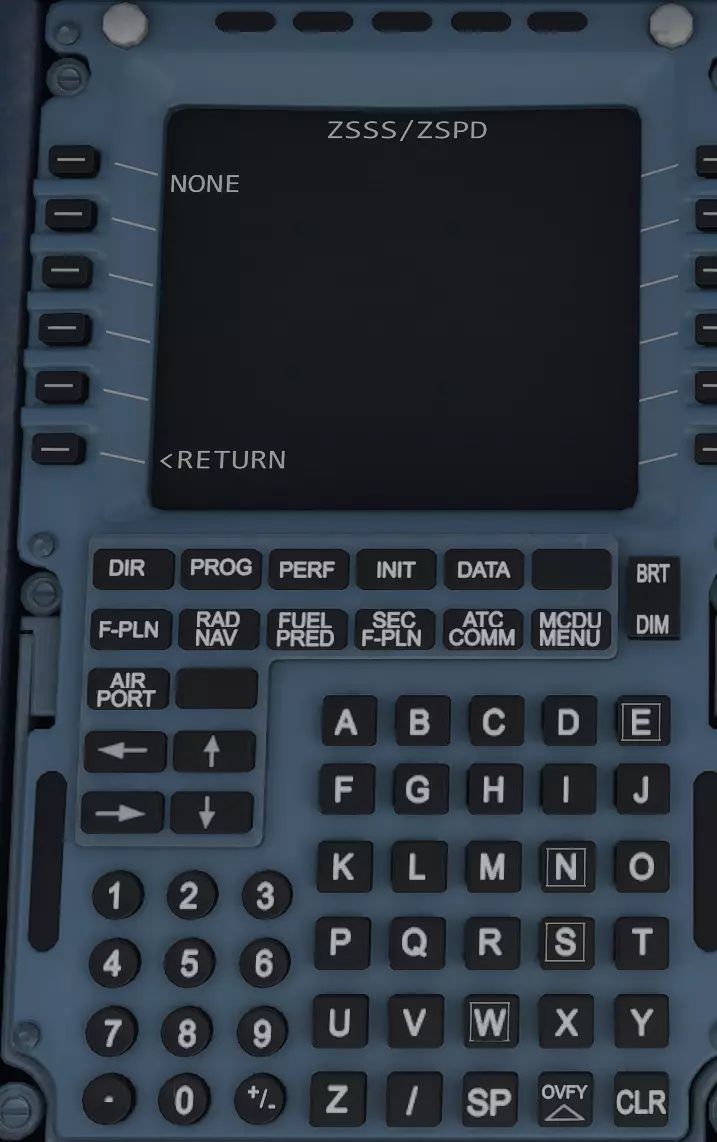
按回车键返回。
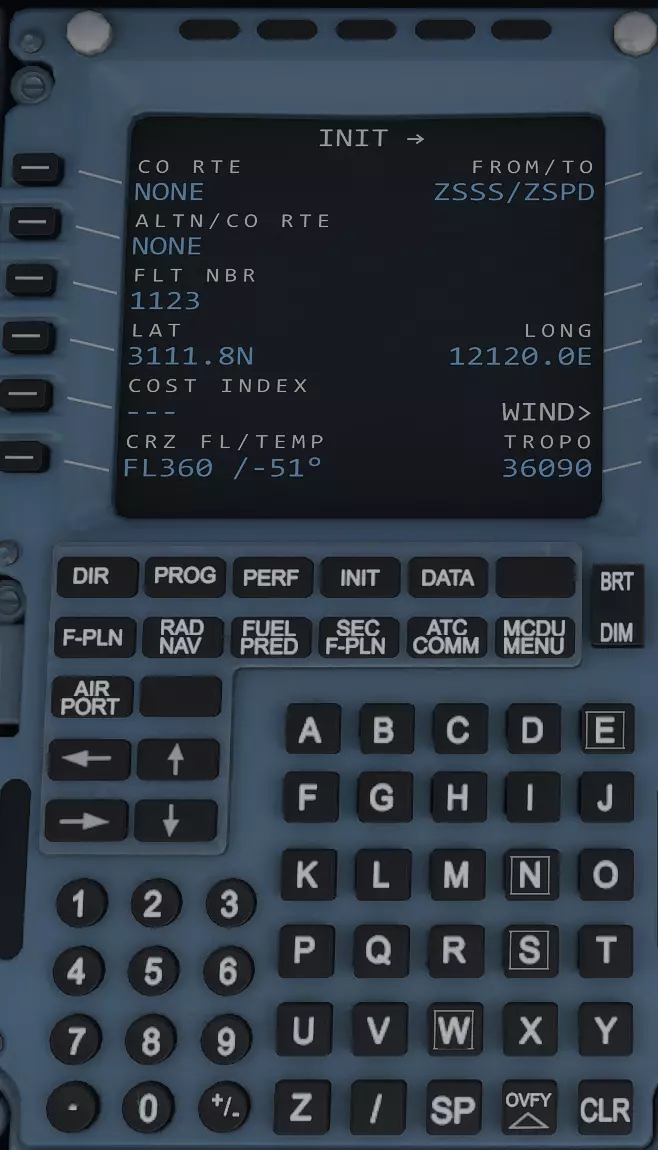
然后按V打开地图确认一下是否有连线就可以了。你还可以在下面的【航班号】设置航班号,【巡航空层/温度】设置相关信息,不过不是必须的。
点一下【飞行计划】(F-PLN),可以看到飞行计划。
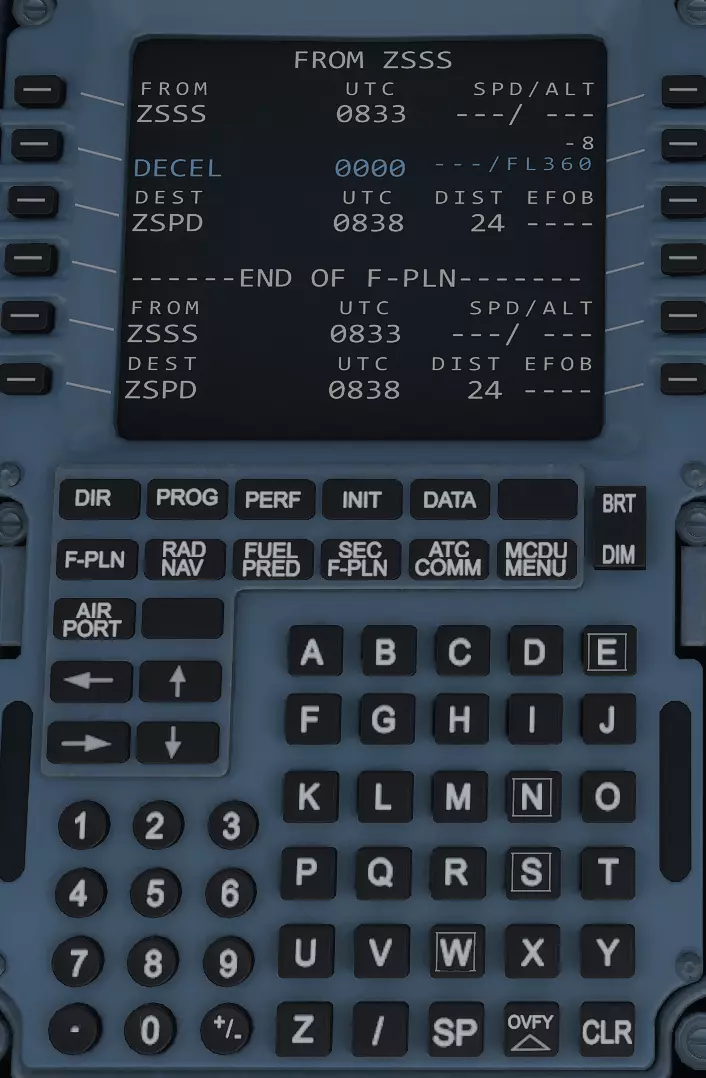
使用上下箭头可以翻页(注意上箭头的作用是将内容向上推,即向下翻页;下箭头则相反)。 点击左侧的离场机场来设置离场程序。
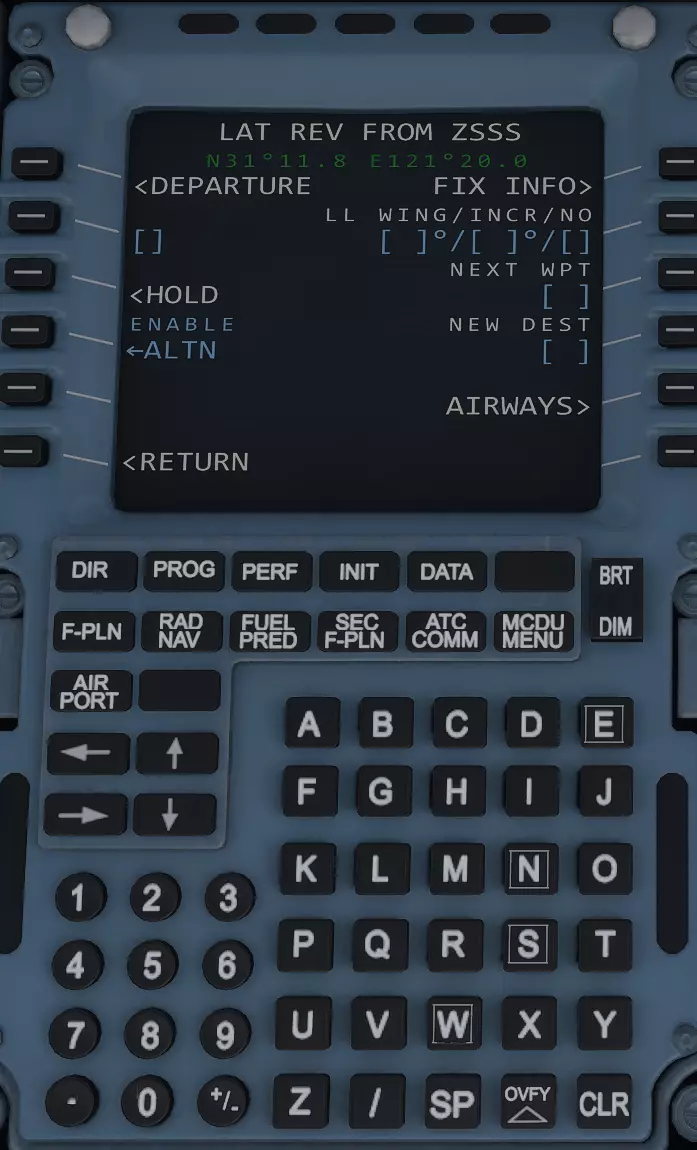
再点击一下【出发】。
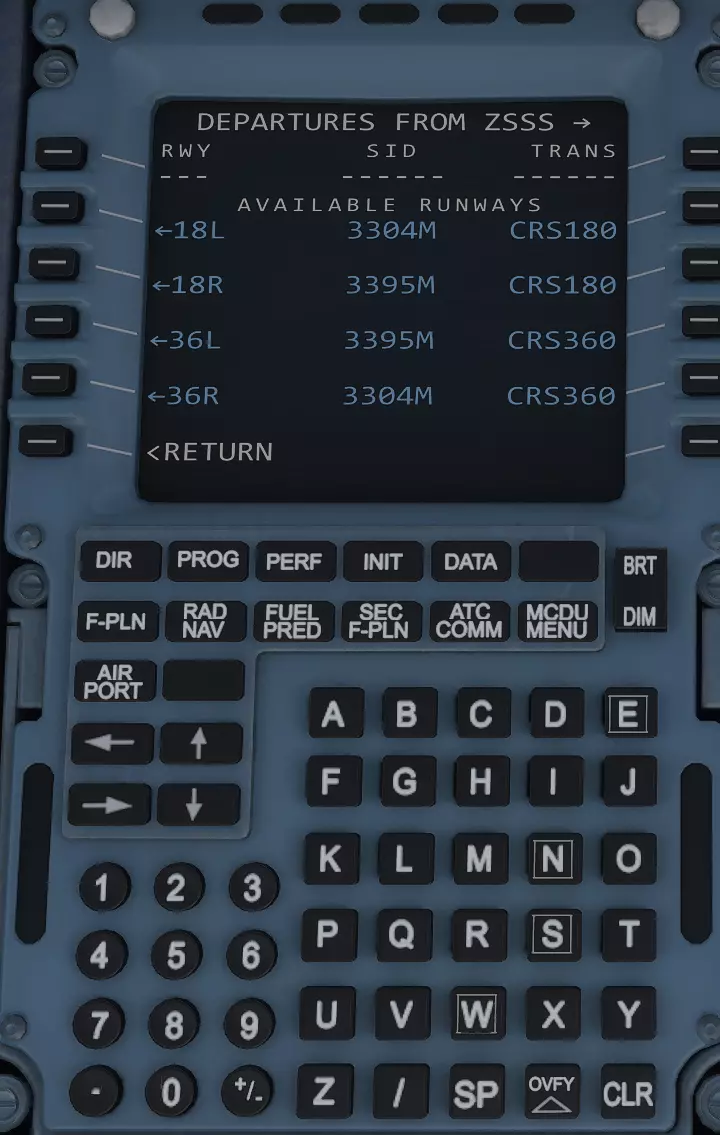
使用左侧边栏键可选择跑道,随后会列出相应程序。
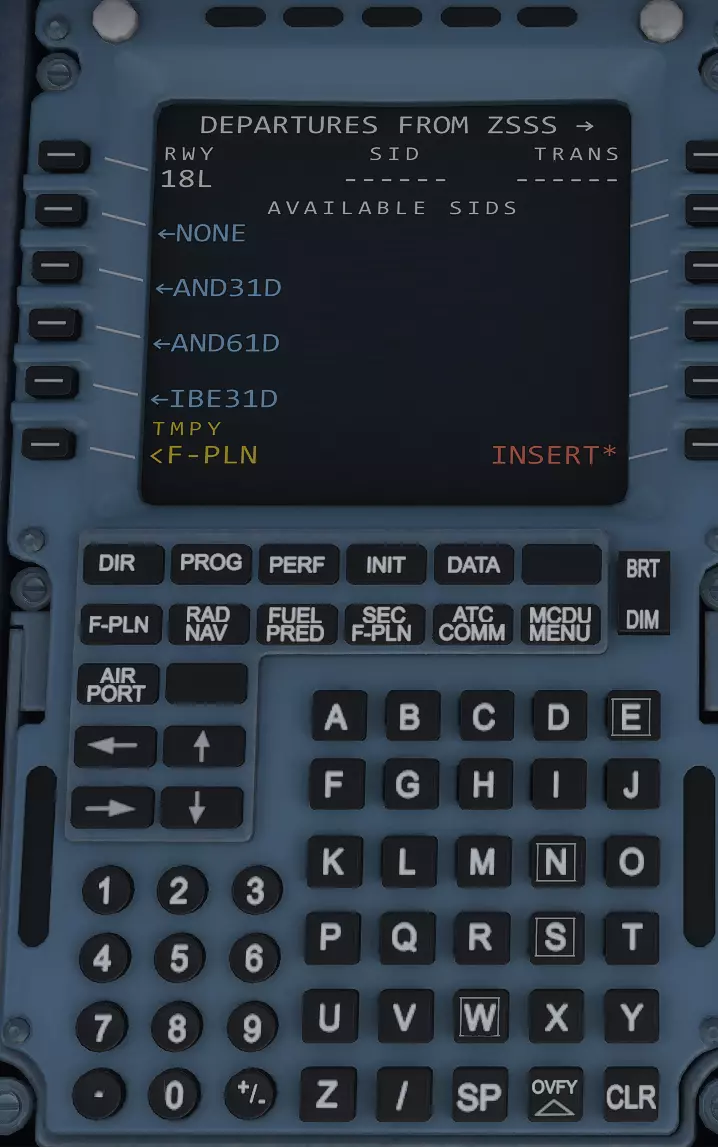
选择完毕后,飞行计划和地图均会发生变化。

点击进场机场,选择进场程序。
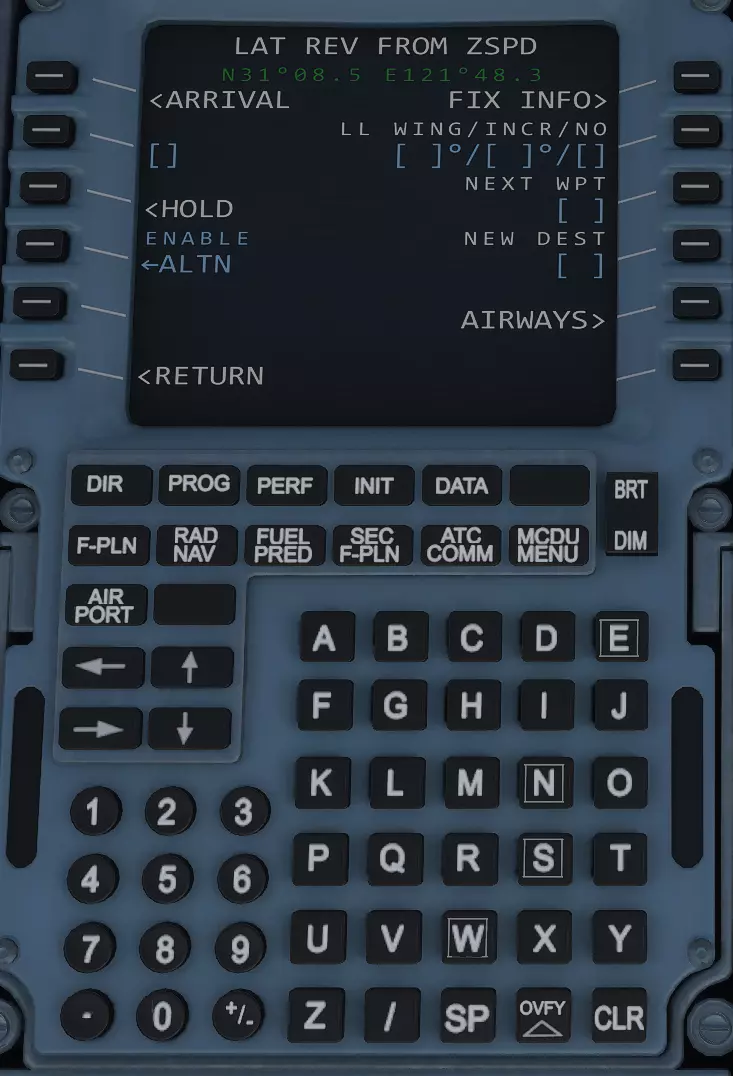
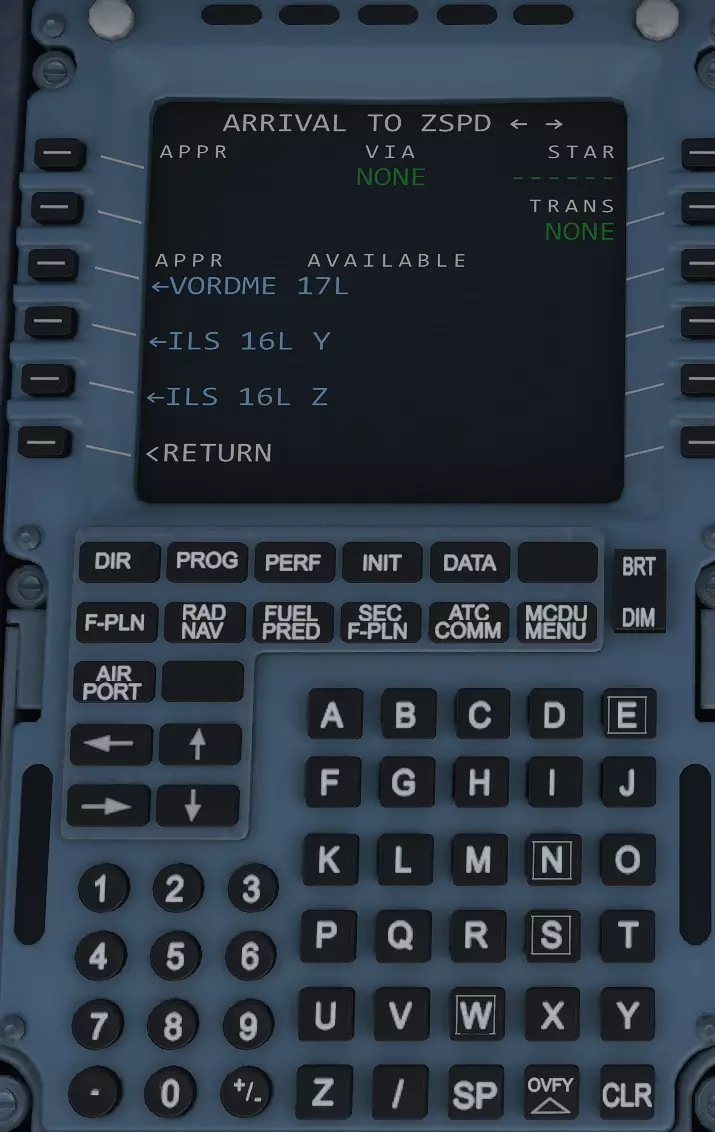
点击【ARRIVAL】。这里列出了进近类型和跑道,请选择一个合适的。
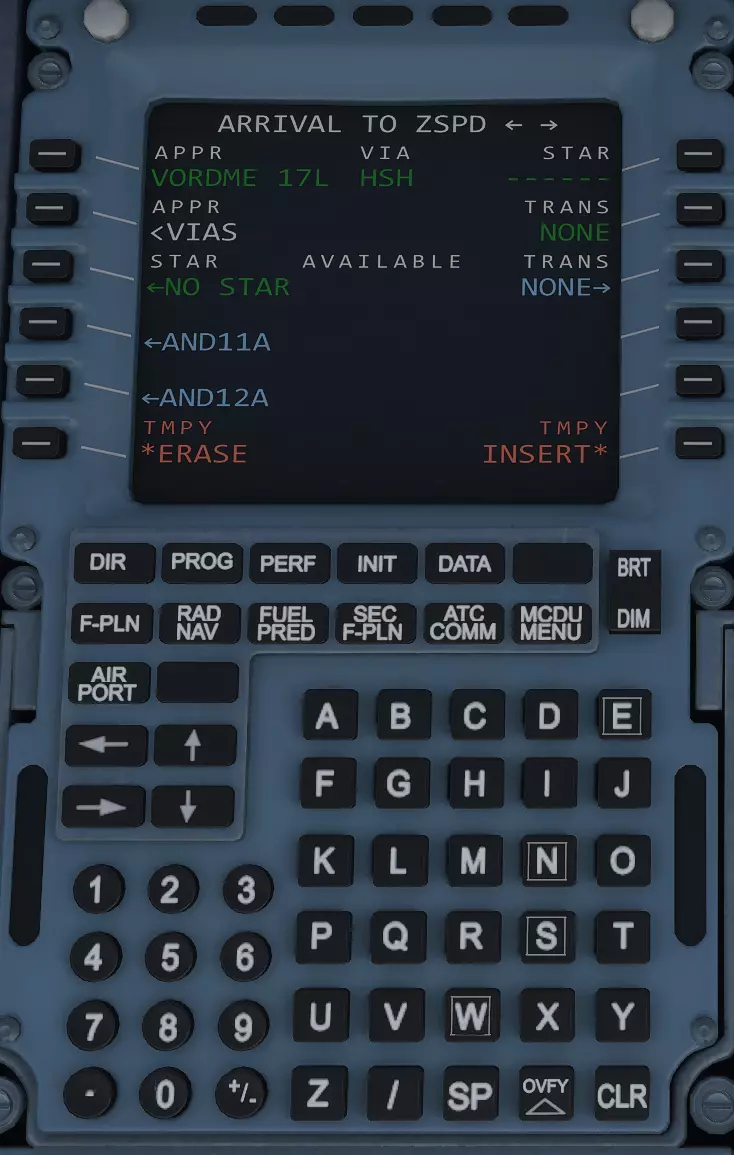
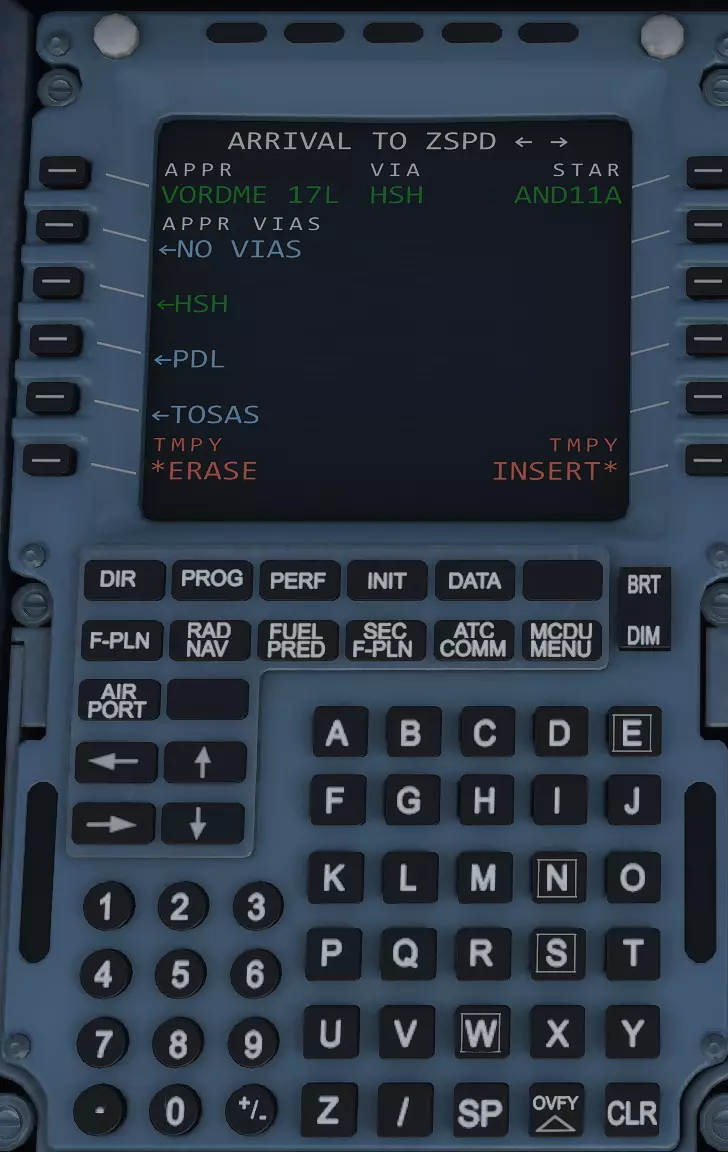
之后会让你选择进场点和过渡点。如果都不选可以直接点击下方的INSERT完成,也可以选择一个,选择完毕后点击INSERT。
检查一下地图,确认航路无误即可。 起飞 首先来认识一下自动驾驶面板,一般位于显示屏左侧,也有的机型在顶部。以下是这些按键的用途:
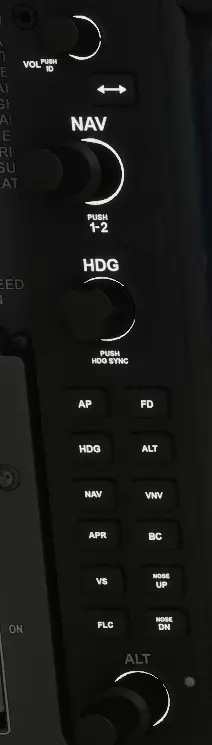

AP(自动驾驶),自动驾驶开启/关闭。 YD(偏航阻尼器),偏航阻尼器。如果系统提示你开启就开启,一般跟自动驾驶一起开启。 FD(飞行指引仪),航向指示。在屏幕上显示为紫色的标志,可以理解为它表示自动驾驶打算将飞机调整到什么姿态。黄色的是当前的姿态,如果二者重合,就表示目前的姿态已经跟自动驾驶吻合了。 HDG(航向),航向模式。无视航路设定,只向某一航向飞。可以用上面的HDG旋钮调整航向,目标航向用青色的标记显示在屏幕上。航向模式与导航模式(见下)冲突,启动一个会取消另一个。 ALT(高度),高度(锁定)模式。注意这个不是调整到某一高度,而是锁定当前的高度不再变化。 NAV(导航),导航模式。最常用的模式,让自动驾驶按照导航前进。与航向模式冲突。 VNV(垂直导航),垂直导航模式。如果你在输入航路时顺便输入了高度,那么会按照指定的高度进行高度导航。(但是一般不用这个模式,因为不是你想飞多高就多高,一切要听空管指挥。) APR(进近),进近模式。准备降落时对齐跑道就可以启动了。进近模式会取消导航,并且试图截获下滑道并自动调整姿态。 BC(反航道),反航道模式。具体作用未知。有人说可以用来复飞,还有人说可以让导航方向转180度,有待测试。VS(垂直速度)模式:开启后可通过右侧的机头上升和机头下降设置上升/下降率,用于调整高度。 FLC(飞行高度层变化)模式:开启后锁定速度,通过机头上升和机头下降调整锁定速度,在引擎转速不变的情况下会爬升/下降以保持速度不变,也可用于调整高度(但个人觉得这种调整方式太慢且时常颠簸,远不如VS模式直观)。 下方的ALT旋钮可用于调整目标高度,先调整高度,再使用VS或FLC模式进行爬升或下降。 空客的使用方法稍有不同:

首先LS是在屏幕上显示附近的ILS设备的位置,也就是你与跑道的相对位置。 大部分旋钮在转到一定数值后都要向下或者向上点一下才能有效果。一般向下表示输入,向上表示解除。比如SPD向下点可以设定巡航速度,向上是让系统自动操纵。HDG是设置航向。ALT下面的旋钮是设置高度。最右边的是设置垂直速度。 AP1和AP2没有区别,都是开启自动驾驶。(在现实中可能会有区别。) A/THR是自动油门,开启后需要将油门放在A/THR范围内才有效。 一般的起飞过程如下: 调整CDI,使用航路导航。 调整高度到合适的值。 开启FD。 开启VS模式,调整一个合适的上升率。 执行起飞程序。注意不要在跑道上或者低空接通自动驾驶。 手动爬升到一定高度,将上升率保持在调好的上升率附近,航向接近你的航路。 接通自动驾驶。自动驾驶会调整配平,你应该可以感到手上拉杆的力渐渐减少,直到放开操纵杆。 开启【导航模式】,开始导航。
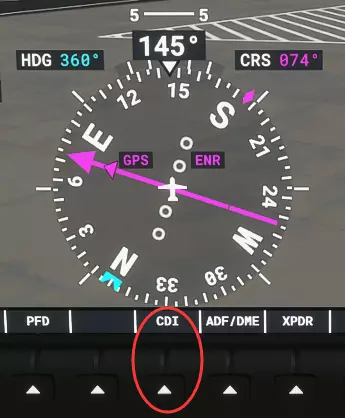
【调整为航路导航,一般为紫色】
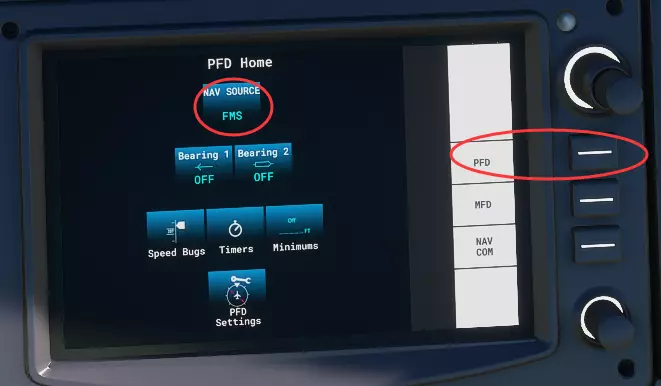
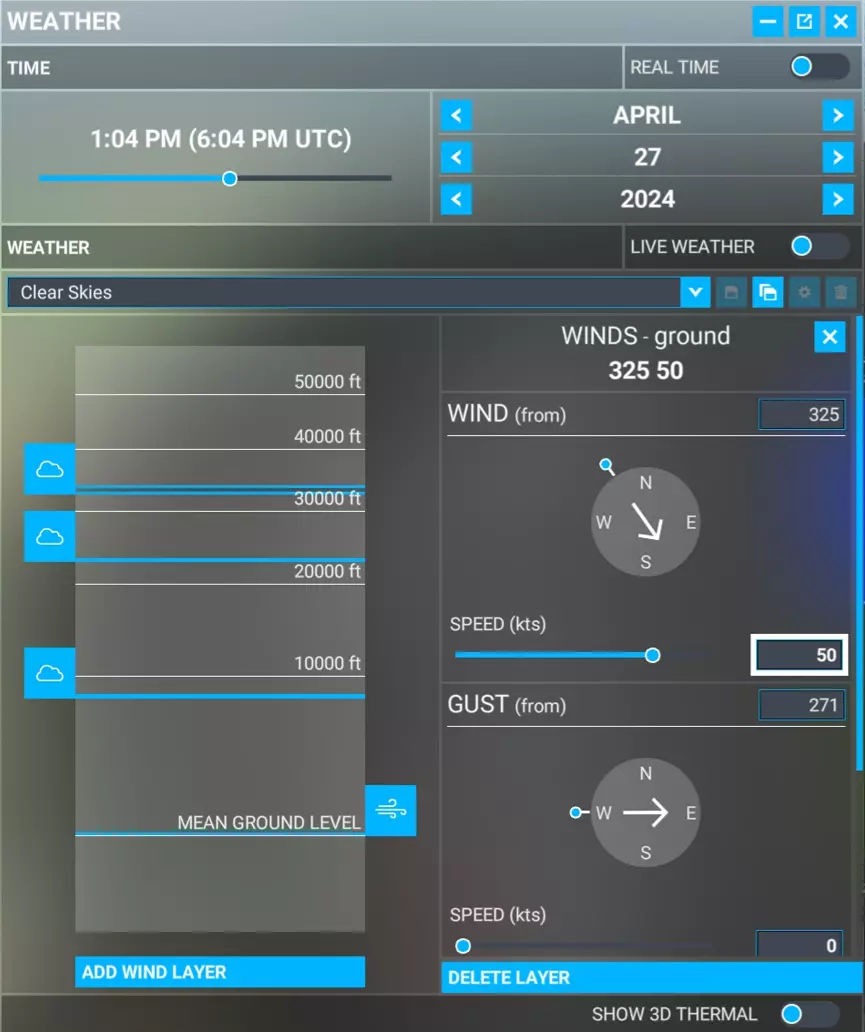
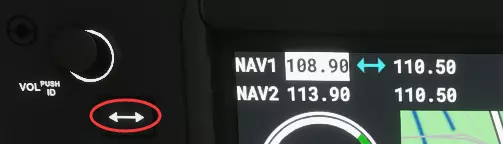
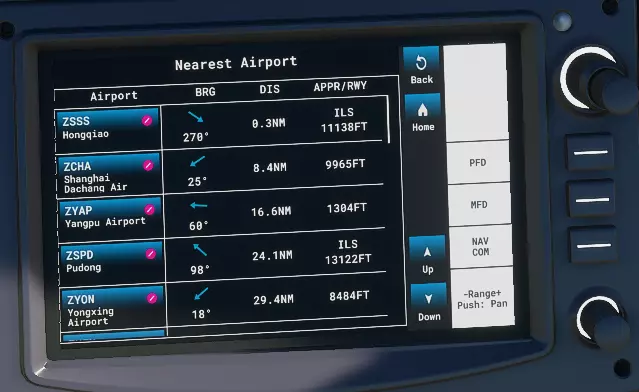
【G3000中在PFD设置里调节导航模式】 巡航 巡航阶段其实没什么可说的。除了看风景(本游戏的主要用途之一),就是空管要求你调整高度。 调整高度的方法如下: 首先用高度旋钮设置指定高度。 启动VS模式(此时VS应该为0)。 用NOSE UP/DN调整上升/下降率。 等待高度变化至指定高度。 降落 降落跟起飞一样忙。有一件事就是可能空管要求你从另一条跑道进近,这样你设置好的进近程序可能就要换掉。换的方法跟起飞前设置航路类似。 在靠近机场的时候,可以查找一下机场跑道进近的频率。很多人以为游戏里没给,其实是有的。虽然你也可以上网查这个频率,不过一切以游戏为准。在模拟飞行中,游戏内没有的频率就是不存在,即便现实中有也无效,一切以游戏设定为准。如果微软方面出现数据错误,游戏内也需按错误数据执行。 Garmin G1000系统需要你在显示地图的屏幕(右侧屏幕)上,转动右下角的大旋钮,从第一个选项【地图】切换到第四个选项【附近机场】(NRST)。首先按【机场】(APT)选择降落机场,然后选择【频率】(FREQ),通过大旋钮调整选项,即可找到对应跑道。
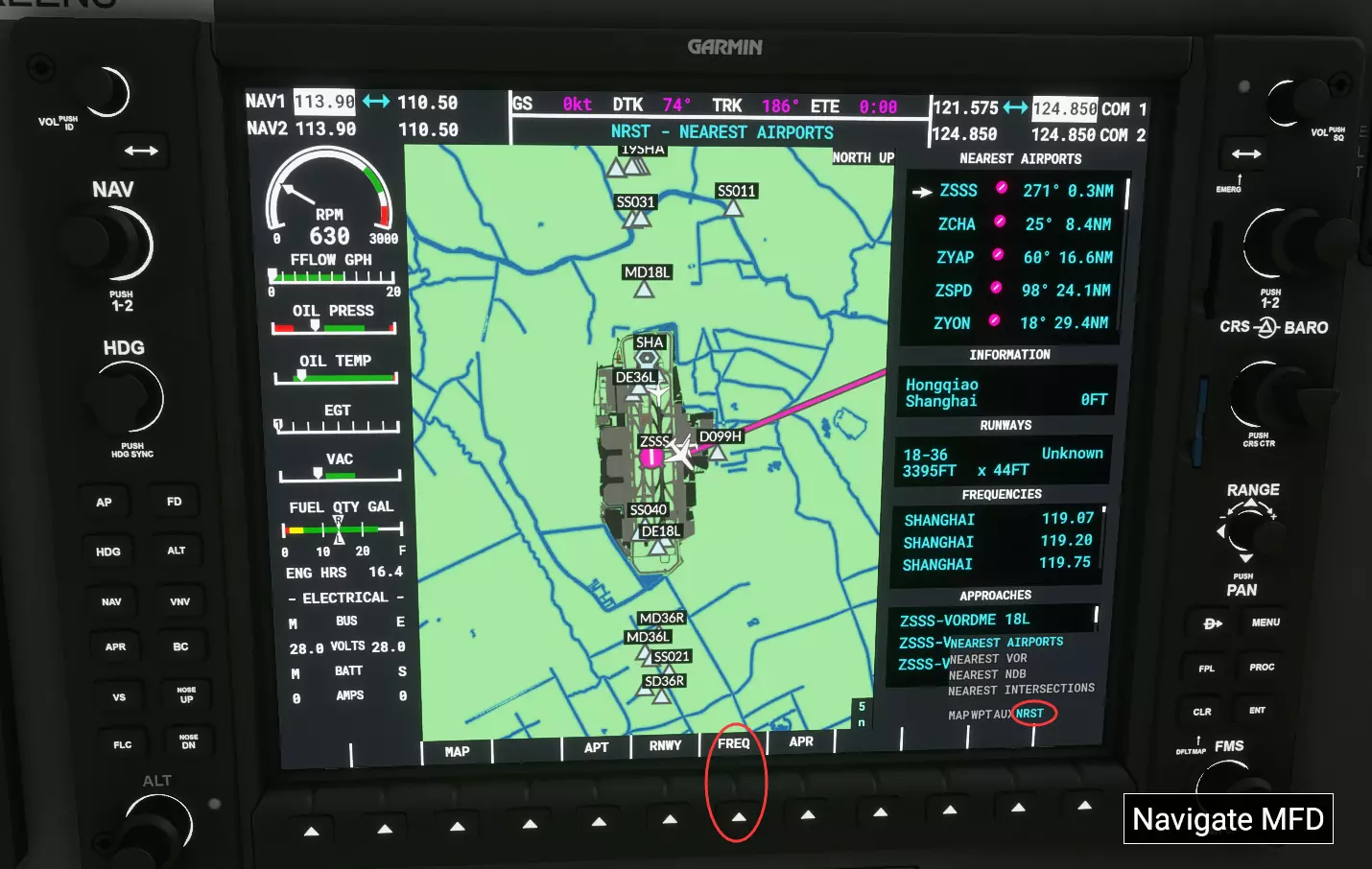
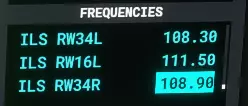
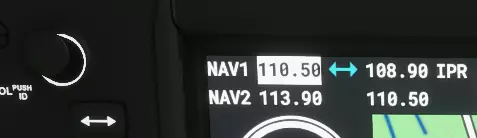
比如你要降落在34R跑道上,那么应该能找到一个名为【ILS 34R】的选项,按ENT可以看到频率。再按一下ENT,这个频率就会填入左上角的NAV1。注意此时点一下左上角的左右箭头按钮,将频率切换到右边才算真正调整了频率。如果距离机场的距离够近,那么频率右边应该能显示出几个字母,表示收到了对应的进近频率。
按下小旋钮清除光标,然后旋转大旋钮回到地图模式。 此时不要切换CDI。等飞机进入对准跑道的最后航路时,开启APR(进近)模式,将CDI从紫色的GPS切换到绿色的VOR1(对应NAV1,若使用NAV2频率则为VOR2)。此时飞机不再由航路导航,转为由机场的降落装置导航,优点是比航路导航降落更精确,且便于截获下滑道。

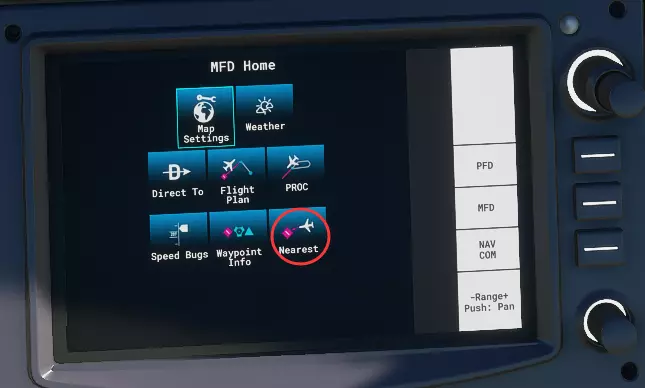
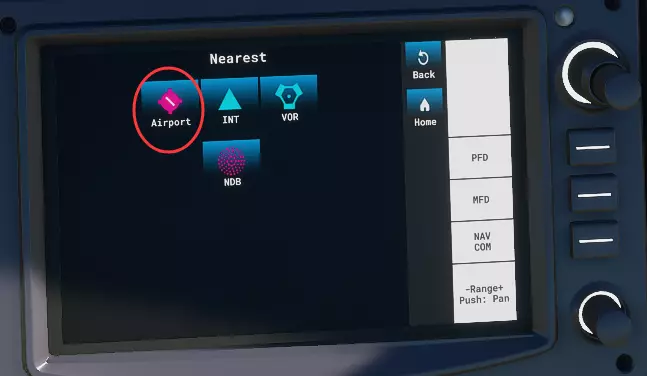
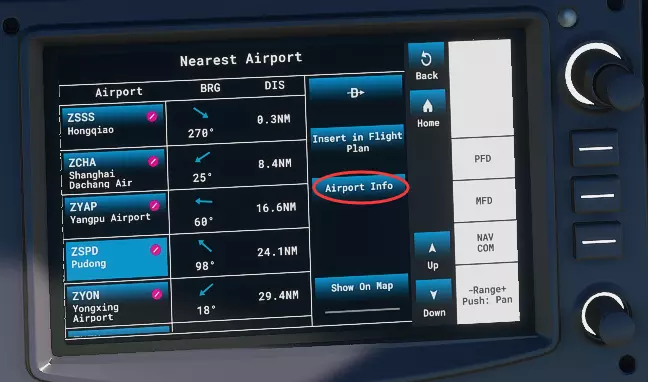
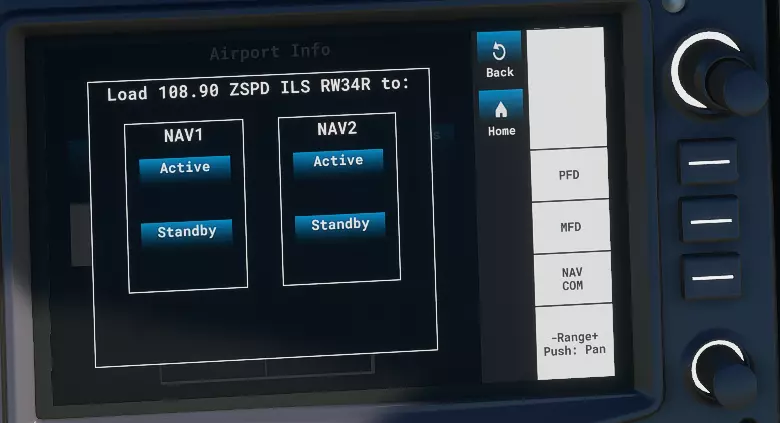
如果设置了正确的频率,甚高频全向信标1会变成航向信标1。佳明G3000的附近机场可在多功能显示器设置中的最近选项里选择,选中机场后点击机场信息,在频率中选择合适的频率,点击激活即可直接将导航频率填入导航1,无需切换。
空客机型只需开启进近模式(APPR),之后剩下的操作(包括油门控制)都可以交给电脑自动完成(毕竟是空客,飞机有它自己的运行逻辑)。波音机型也是同样的操作方式。 无论使用哪种导航方式,在接地前都建议断开自动驾驶,手动进行降落操作。(除了出于安全考虑外,主要是游戏中我发现不少机场的下滑道设置存在偏差,根本没有准确对准跑道。遇到这种自动驾驶异常的情况,请立即接管手动操作,不要犹豫。) 更新历史 2020.09.20 添加了多功能控制显示组件(MCDU)用法 2020.09.16 添加图片 2020.09.16 初稿