换一换
换一换 





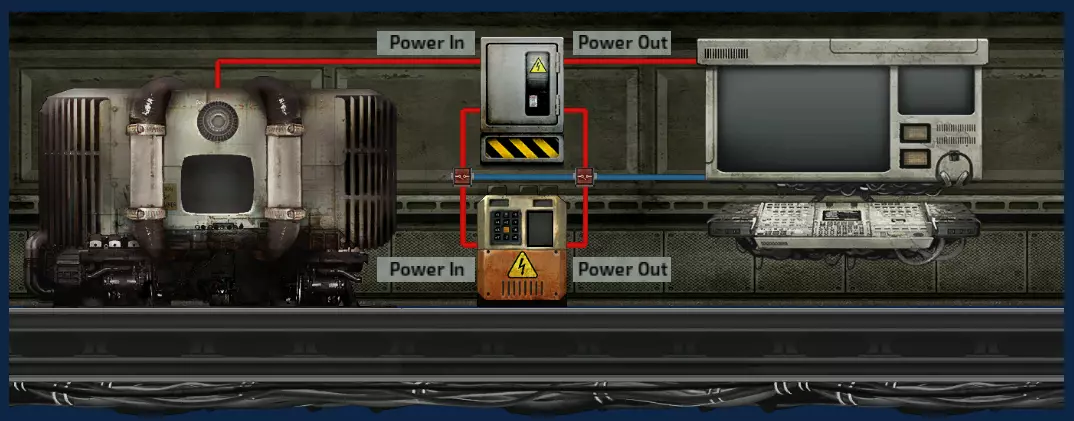
这里介绍一种能够实现电池-反应堆综合自动化的方案。 该方案可以将反应堆的“多余能量”用于给电池充电,并防止电缆盒过载和“烧毁”。 完整方案。 使用11个逻辑元件,就能延长电缆盒的使用寿命,并为反应堆节省燃料。电缆盒会随着时间推移逐渐损坏,但损坏速度会慢很多。额外的好处是,当反应堆停止时,你不会失去动力和控制。如果不安装电池断开按钮和反应堆涡轮自动化装置,只需8个PPVM(电力分配模块)即可。 电缆盒接线图:
完整布局图
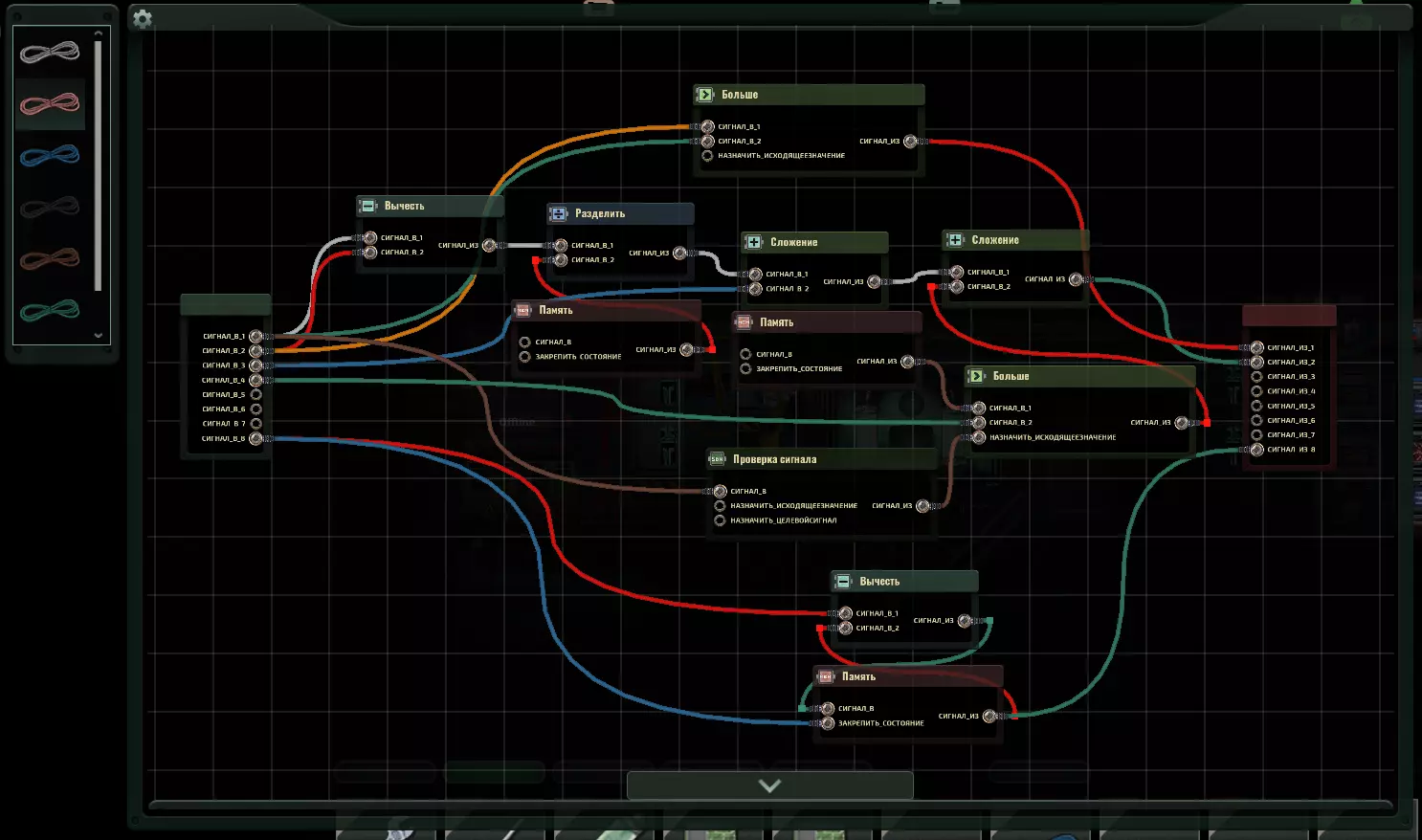
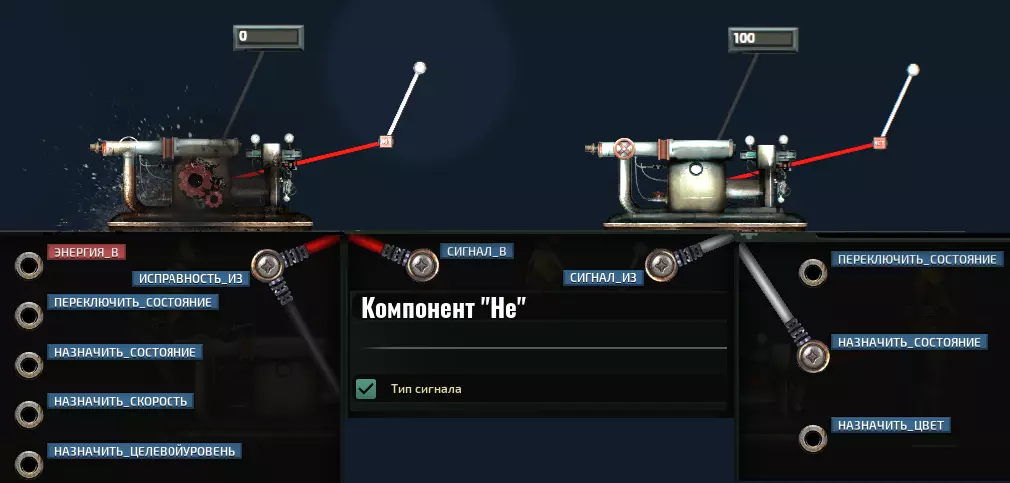
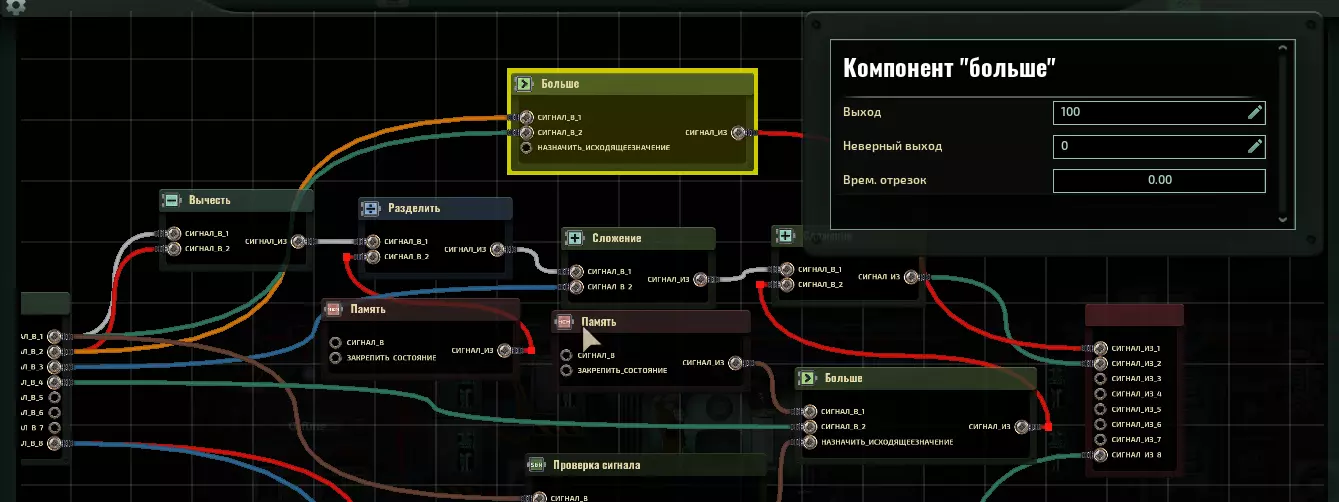
请记住,在上方的“大于”中,应在“输出”处填入100。 在左侧的“加法”中,应设置最大值106和最小值0。 在下方的“大于”中,应在“错误输出”处填入-6,在“时间间隔”处填入1。 在“信号检查”中,应填入0,100,0。 左侧内存5乘以蓄电池数量(未升级前)。 船只简要说明:未升级、1级、2级、3级充电速度升级。10、11、12、13 - 獾、双髻鲨、蝠鲼、骆驼、台风、方位角 15、16.5、18、19.5 - 温特汉特勒 20、22、24、26 - 铍矿 右侧内存为70或80。 下方内存为0 建议阅读并完成步骤1 - 提高船只的生存能力。 注意! 部分船只的电池充电会出现0%到100%之间的波动。 要解决此问题,需在3号输入口和【加法】组件之间插入【延迟】组件。将延迟设置为0.1秒。紧急制动——电池充电速度提升至100%,并从为发动机供电的“过热”反应堆中吸收“多余”千瓦电量。结果,电池电量提升数个百分点。这种将返回电池的能量重复利用的过程被称为能量回收。在部分潜艇上可能无法实现完全补偿,例如在【温特亨特】号上,发动机功率为4200,而蓄电池的总充电速度仅为1500。尽管如此,该方案在这艘潜艇上依然非常有用,结合反应堆自动化后能带来不错的效果。 频繁使用电池会加速其损耗,但与设备损坏和火灾相比,这一代价非常低。此外,电池不会发热。 当然,无法手动精确调节电池的充电量。 这可以通过一个仅由8个元件组成的逻辑电路来实现。 步骤1:提高潜艇的生存能力。 确保在发电量低或电缆槽损坏时,潜艇的主要设备能依靠电池运行。电池【能量输入】接口 在所有原版潜艇上,电池的【能量输入】接口和【能量输出】接口均通过继电器进行连接。这些继电器的负载承受能力高于标准继电器。标准继电器的负载承受能力为1000千瓦。 原版潜艇上电池所使用的继电器负载承受能力如下: - 獾级:5000千瓦 - 奥卡级:3000千瓦 - 奥卡2级:2000千瓦 - 方位级:输入3000千瓦/输出4000千瓦 - 台风级:2000千瓦 - 冬季商人级:5000千瓦 其他潜艇的相关数据可在编辑器中自行查看。我建议将电池的【能源输入】接口绕过继电器,直接连接到电缆盒。要关闭电池,可以将一个杠杆连接到【断电】接口。当杠杆被按下时,【断电】接口会收到“1”信号。只要【断电】接口收到“1”信号,电池就不会输出能量,但在“关闭”状态下仍可充电。如果需要在潜艇的多个位置安装电池关闭按钮,例如从导航终端和反应堆舱室进行操作,可以制作一个由【减法器】和【存储器】元件组成的简单电路。该电路最多可连接5个按钮,若通过继电器连接,则数量不受限制。 这种电路可通过按下按钮来切换存储器的0/1状态。我在【虎鲸-1】号上遇到了这个问题。 回收方案是我自己设计的,反应堆自动化是参考了其他人的。 大家随意使用,祝你们好运。 注意:在单人战役中,火灾是剧情转折点。所以无论你如何改进设备,在大约第6-7个任务时都要准备好应对火灾。给其中一个机器人下达“灭火”指令。多人游戏中则没有这种情况。 接下来的部分是详细说明。不喜欢理论和哲学的人可以不用继续阅读了。 引言:谁该为箱子过热负责,以及该如何处理? 过载是一个相对值。 在编辑器中,箱子有一个负责此功能的参数。名为【过载压力】——基础值为2(100%)。部分原版潜艇的该参数为1.7(70%),部分为2.0,而【台风1号】的该参数为1。5(50%) 举个例子,假设我们的潜艇这个参数为50%。 如果发电量超过耗电量50%,电箱就会开始闪红光,并且其【健康值】会迅速下降。 例如:发电量150,耗电量100=电箱过热(差额50%) 例如:发电量3000,耗电量2000=电箱过热(差额50%) 例如:发电量3000,耗电量2100=电箱不过热(差额低于50%) 发现规律了吗?在第一个例子中,功率峰值仅为50千瓦,设备就出现了过热情况;而在第三个例子中,功率峰值达到900千瓦,设备却能正常运行。由此可见,在低发电量和低耗电量的情况下,耗电量的波动要危险得多。氧气发生器可作为缓解耗电量波动的【缓冲装置】,其耗电量为1000千瓦。例如,“小型潜艇”的氧气发生器会消耗三分之一的反应堆功率。因此,为节省电力而关闭氧气发生器时,舱室会开始严重损坏甚至起火。采用我的方案后,可以关闭氧气发生器,还能为其设置自动控制系统,当空气状况恶化至55%以下时自动开启。55%是人们开始出现缺氧症状的阈值。这最多能节省30%的电池棒,在游戏初期阶段相当重要。而且我讨厌通风扇的噪音。 潜艇上功率最大的设备是发动机。 不同类型的潜艇在全速行驶时,发动机的耗电量有所不同。 发动机的耗电量通常在2000千瓦左右。因此,如果船长在潜艇全速行驶后突然停车,多余的两千瓦功率会冲击货箱,导致所有货箱几乎瞬间损坏。 这种情况在【巴萨克】潜艇上尤为明显。当这艘潜艇加速时,电路电压会下降,设备开始“闪烁”。 而当【巴萨克】潜艇突然停车时,全艇的货箱都会损坏,还常常引发火灾。即使在氧气发生器开启的情况下。 如何避免这种情况? 需要将电池的充电速度设置为能够补偿电压差的水平。 启动加速时,电池充电速度会降至0%,发动机工作所需的额外能量将由电池提供,这会使电池电量下降几个百分点。
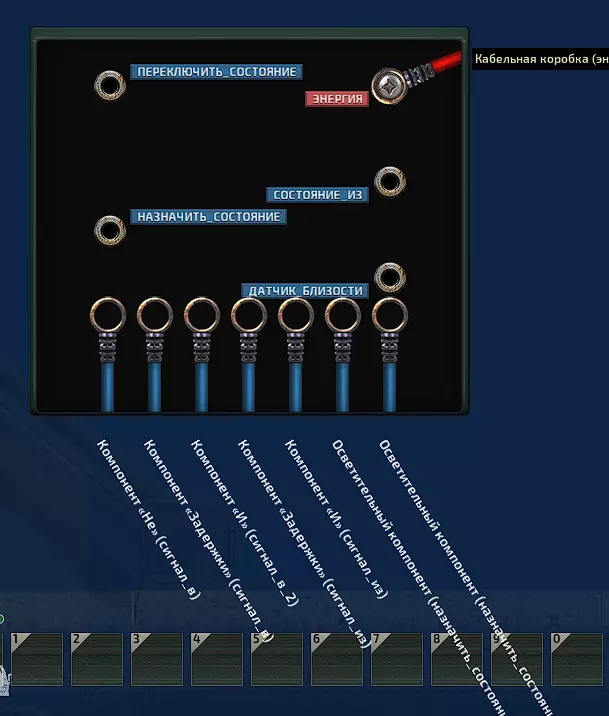
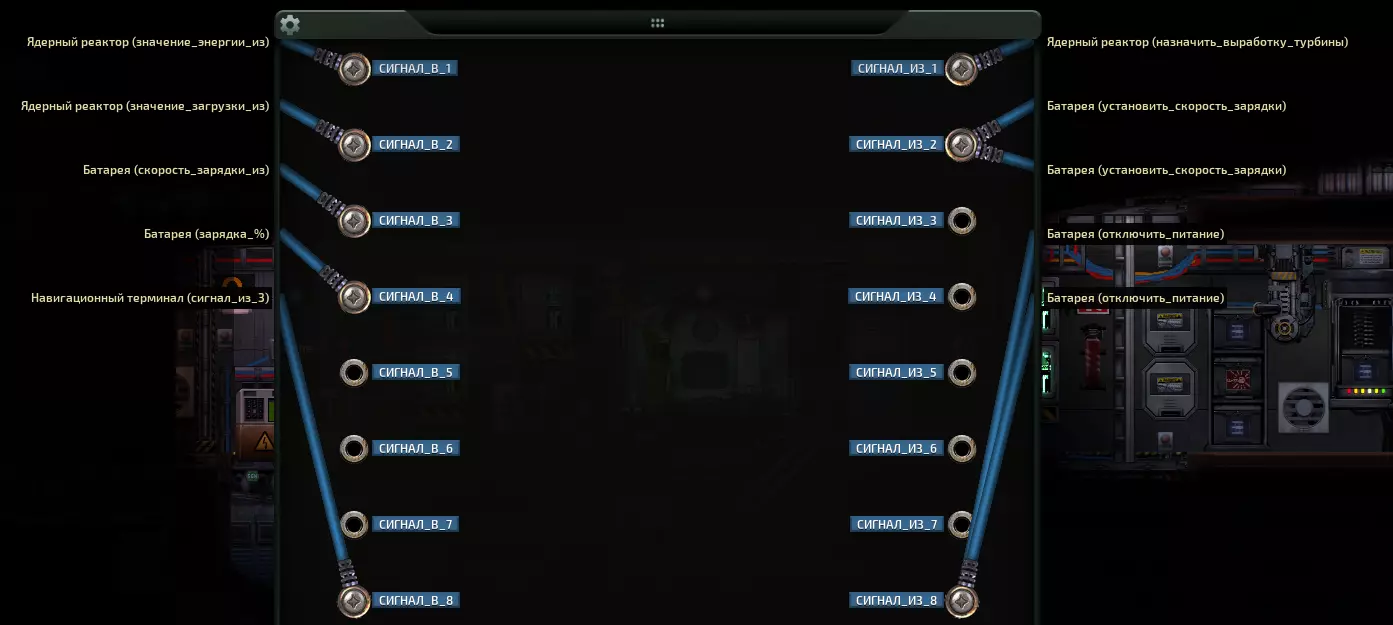
【信号_8】最多可连接5个按钮。按下其中任意一个按钮,内存状态将在1和0之间切换。 可以用一个继电器替代这两个元件组成的电路,将按钮连接至【切换状态】输入端,【电池断开】连接至【状态输出】端。结果将保持一致。(感谢Одяг з Європи的提示) “能源输出”电池的连接方式 从第一个“能源输出”接口的电池引出电线,连接到发动机和压载水泵的“能源输入”接口。 从第二个电池引出电线,连接到压载水泵、主导航终端和状态显示器(主终端旁)的“能源输入”接口。 这种线路连接方式可提高船只的生存能力。在这种情况下(只要电池还有电量),即使所有电缆槽都烧毁,潜艇仍能保持可控状态。当然,前提是电池没有烧毁或耗尽电量。 不要将导航终端、状态显示器和发动机连接到同一电池,因为电池通常输出功率为2000千瓦,当发动机启动时,导航终端会断电。当压载舱的船体破损时,水泵会开始“抽取海水”,导致电池快速耗电。要避免这种情况,可以给潜艇断电(暂时关闭反应堆和电池进行维修)。此外,从防烫伤的角度来说,维修断电的电缆盒是安全的。 可以给水泵安装一个在高压下降低能耗的电路,但这需要单独说明。 步骤2:安装用于电路的电缆盒和布线。整个线路将安装在电缆盒中。电缆盒需要2个塑料、4个铜和4个铅。它可以在船只的制造厂或前哨站制作。 游戏初期你没有铅。如果向前哨站的工程师购买4个文本屏幕并拆解它们,材料正好够制作1个电缆盒。还会剩余2个塑料和4个硅。这大约需要700马克。 塑料和铅可以在废弃船只和水下废墟中找到。铜用于开关、按钮、操纵杆、PPVM(电力分配与管理系统)中。 在第一个前哨站,PPVM(电力分配与管理系统)的线路图和导线可以从商人、工程师处购买,或者从自己潜艇的墙壁里拆取。线路图每个大约70马克,需要8-11个。 我会提供适用于任何配备两个电池的潜艇的完整线路图。 如果是3个或4个电池,差别会非常小(我之后会说明这一点)。连接电缆盒的输入端 从反应堆向盒子引出【能量值输出】至【信号输入1】 从反应堆向盒子引出【负载值输出】至【信号输入2】 从第一个电池引出【充电速度输出】至【信号输入3】 从同一个电池引出【充电百分比】至【信号输入4】 输入端已连接完成,现在处理输出端 将【信号输出1】引至反应堆的【设定涡轮发电量】输入端 此步骤非必需,但如果进行简单如果实现反应堆自动化,整体方案的运行效率会更高。 将【信号_2】连接到第一个电池的【设置充电速度】输入端。 将【信号_2】连接到第二个电池的【设置充电速度】输入端。 如果电池数量超过2个,则将所有电池的【设置充电速度】输入端都连接起来。 电池会平均分担负载,因此它们的充电速度始终保持一致。第二个输出端口的充电速度将适用于所有电池
步骤3. 自动化工控核反应堆(可选)。在电缆盒中放置【比较器】元件 将【输入信号2】(负载值输入)连接到比较器的上输入端 将【输入信号1】(能量值输入)连接到比较器的下输入端 在比较器的属性中设置【输出】为100,【错误输出】为0 将比较器的输出端连接到【输出信号1】(设定涡轮机发电量) 现在涡轮机将以最大速度响应负载变化。同时,【裂变速度】将由内置自动装置控制。也就是说,反应堆的【自动控制】杆不能关闭。这种方案非常简单、高效,且不受反应堆功率变化的影响——无论是由于升级还是出现拥有第三分支【物理学】专长【嗡嗡作响】的工程师。
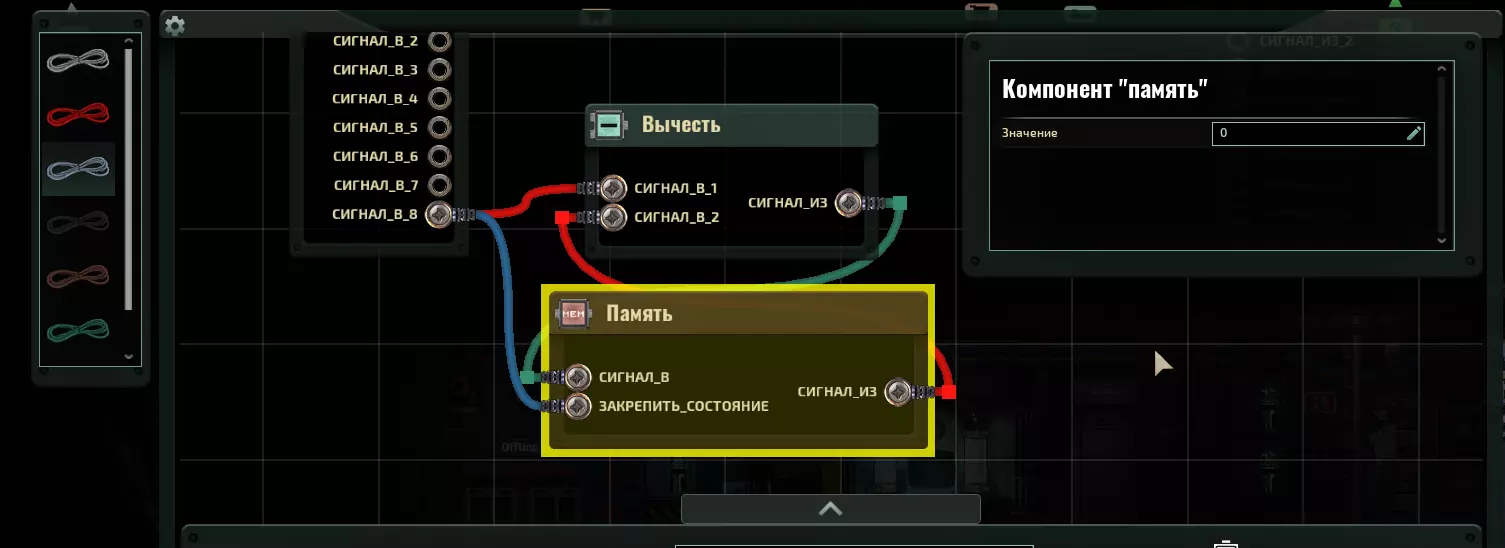
步骤4. 实现电池回收自动化。 首先我们需要弄清楚发电量和耗电量之间的差值。 因此,第一个元件是“减法器”。 从“输入信号1”(“输入能量值”)中减去“输入信号2”(“输入负载值”)。 我们得到了需要补偿的差值(单位为千瓦),这个差值可能为正也可能为负。接下来需要将其转换为百分比。为此,需要将得到的差值除以所有电池的最大充电速度之和再除以100。大多数原版潜艇的每个电池最大充电速度为500千瓦。 因此,对于【巴萨卡】、【蝠鲼】、【蝠鲼2】、【骆驼】、【台风】、【方位角】潜艇,(500+500)/100=10。 对于【温特亨特】潜艇,该值为15。 对于【铍】潜艇,该值为20。 安装记忆元件并在其中输入10。电池升级后,此数值需要重新校准。目标已达成,“多余能量”已用于为电池充电,节省了燃料棒。 现在您应该明白,为什么在第一个算式中上限是106了,这是为了补偿“更大”组件中的-6。 步骤5. 创建“电池关闭”按钮 首先查看您的导航终端是否有“电池开/关”或类似按钮。如果没有,请添加这样的按钮,它非常有用。在停靠或维修时没必要浪费电力。而且维修断电的电缆箱对船员来说是绝对安全的。 从你安装的按钮,或者从终端的【信号输入_1、2或3】引出线路,连接到电池旁带有我们设计电路的【电缆箱】。 将此线路连接到【信号输入_8】。而电缆箱内部的【信号输入_8】需连接到我在文章开头描述的由【存储器】和【减法器】组件构成的电路。从这个【存储器】引出线路连接到【信号_8】。将【信号_8】在所有电池上连接至【切断电源】输入端。 现在你可以一键切断电池供电。 最后,关于反应堆自动化的一些问题。 反应堆自动化的问题出在哪里? 许多自动化方案都假设工程师知道反应堆的最大功率。【最大功率】会被记录到内存中,系统会根据该内存中的数值计算所需的涡轮机输出功率和裂变速度。此系统存在三个缺点: 1. 每次升级反应堆后,都必须重新校准反应堆的自动控制。 2. 如果工程师拥有【嗡嗡作响】技能,且该工程师离开飞船或死亡,反应堆功率会在回合中直接变化10%,此时需要再次校准。 3.破坏“反应堆功率”的内存值,破坏者会引发反应堆爆炸。不过,任何线路都无法幸免于破坏者的影响。好在破坏者通常都是愚蠢的废物,不会使用复杂线路。 在我上面的文章中,描述了一个仅由一个“更多”组件构成的简单线路,它不依赖反应堆功率,只影响涡轮机的发电量。当然,我并非该线路的原创者,而是从公开来源获取的。它的简单性和高效性令我印象深刻。 这个方案有很多优点,没有任何缺点。 裂变速度不受影响,由【原版】自动系统控制。 裂变速度由反应堆温度调节。裂变速度具有“惯性”。简单来说,反应堆左侧的滑块无法快速移动。 因此,反应堆内放置4根控制棒是有利的。左侧滑块的行程越短,反应堆在功耗变化时调整到新裂变速度的反应就越快。 如果不是一次性将控制棒插入反应堆,而是每隔5分钟插入一根,那么它们就会依次耗尽。此时,更换四根控制棒中的一根不会导致反应堆过热。而更换两根控制棒中的一根则会引发【卡萨特卡】上的火灾。在反应堆分裂速度调节方面,自动控制系统能很好地发挥其功能,无需额外的自动化装置。 在涡轮机功率调节方面还有提升空间。“涡轮机功率”的变化速度比预期要慢。 基于此,设计出了由单个【大于】组件构成的涡轮机功率自动化方案。这个【大于】组件可以轻松隐藏在反应堆后面或地板内部。断开“设定涡轮机发电量”接口的电线不会造成任何负面影响,只会恢复为“默认”自动模式。 对于那些想了解更多关于反应堆知识,并且还没阅读过维基上这篇文章的人,强烈推荐阅读一下。 如果英语不好,可以使用浏览器内置的翻译工具。 简而言之:反应堆为潜艇提供电力。不同潜艇的反应堆功率有所不同。 一级至二级潜艇的反应堆功率为3000-5200。 二级至三级潜艇的反应堆功率为3100-8500。 关于原版潜艇的反应堆功率表可参考游戏维基页面。第一次升级后,需要在内存中输入11(16.5温特汉特勒,22铍) 第二次升级后,需要在内存中输入12(18,24) 第三次升级后,需要在内存中输入13(19.5,26) 如果忘记这样做,不会发生什么严重后果,只是方案的效率会略有下降。 用这个内存元素去除差值。 将除法结果加上当前的电池充电速度。如果反应堆的满功率或当前发电量不足,那么所需的额外电力将要么从已连接的电池中获取,要么潜艇将面临供电困难,机械装置的电压会降低。如果当前发电量超过耗电量,会导致电缆盒以及直接连接到电缆盒的设备出现磨损,甚至引发火灾。 通过继电器连接可以“平滑”过剩电压,从而避免由此造成的损坏。继电器允许通过的最大功率限制为1000千瓦。潜艇上唯一耗电量超过1000千瓦的设备是发动机。因此,除发动机外,将所有设备通过继电器连接是合理的。我的回收电路方案可以完全解决过载问题。如果差值为负,充电速度会降低;如果差值为正,充电速度会提高。为此,我们加上“信号_3”(“充电速度_源”)。恭喜,你获得了这样的电池充电速度,它将通过把“多余”的能量吸收到电池中来进行补偿。电池速度不能超过100%,因此在最后一个加法项中,我们将最大值限制为106(为什么不是100将在下文说明),将最小值限制为0。一切几乎准备就绪,但有两个问题。第一个问题是,发动机停止后电池会继续充电,充满后将不再提供过压保护。第二点是,当频繁进行机动操作时,电池可能会完全耗尽,导致潜艇陷入能源短缺的状况。 为了避免上述两种情况,我们新增了三个组件:加法器、“大于”模块以及信号检测模块。 在加法器中,第一个加数为上一次加法运算的结果。 第二个加数则由“大于”模块与“信号检测”模块的组合来生成。将【信号输入1】(【能量值输入】)的线路连接至【信号检查】的【信号输入】。 在【信号检查】的属性中填写: 输出 0 错误输出 100 目标信号 0 将【信号输出】连接至【信号检查】的【设定输出值】输入接口。 这样做是为了在反应堆关闭时,将电池充电速度降至0。如果不这样做,反应堆关闭时电池会更快耗尽。在“大于”组件中,第一个参数应设置为内存。 在该内存中应填入电池的最低剩余电量百分比。我建议设为70或80。这样潜艇的电池会有足够的电量储备,同时也留有充电的空间。如果电池经常过充,可以将该值降低到50。你可以进行尝试,这是安全的。如果电池电量达到100%,充电功能将停止工作,因此请关闭反应堆几分钟,让电池放电至70-80%。 在【大于】组件中,第二个参数将是【信号_4】(【电量_%】) 在【大于】组件的属性中输入 输出100(如果反应堆关闭,此值将自动变为0) 错误输出-6 时间片段1(这对电路的正常工作至关重要) 将该组件的“输出”端连接到第二个加法器。 这里的-6是为了在电池的不可降低剩余电量被超过时,电池不会完全补偿过载,而只会补偿90%,同时反应堆会降低发电量。相应地,电池会降低充电速度。当充电速度达到0时,系统将达到平衡状态。