换一换
换一换 





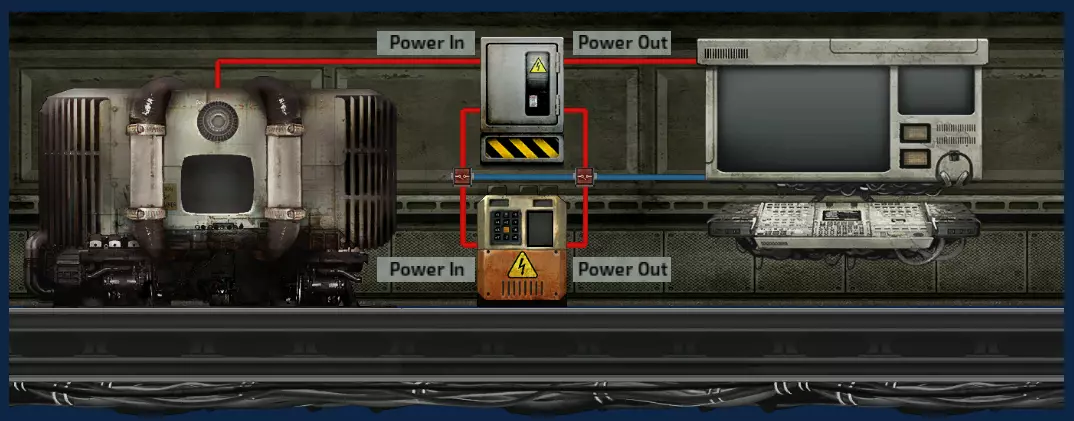
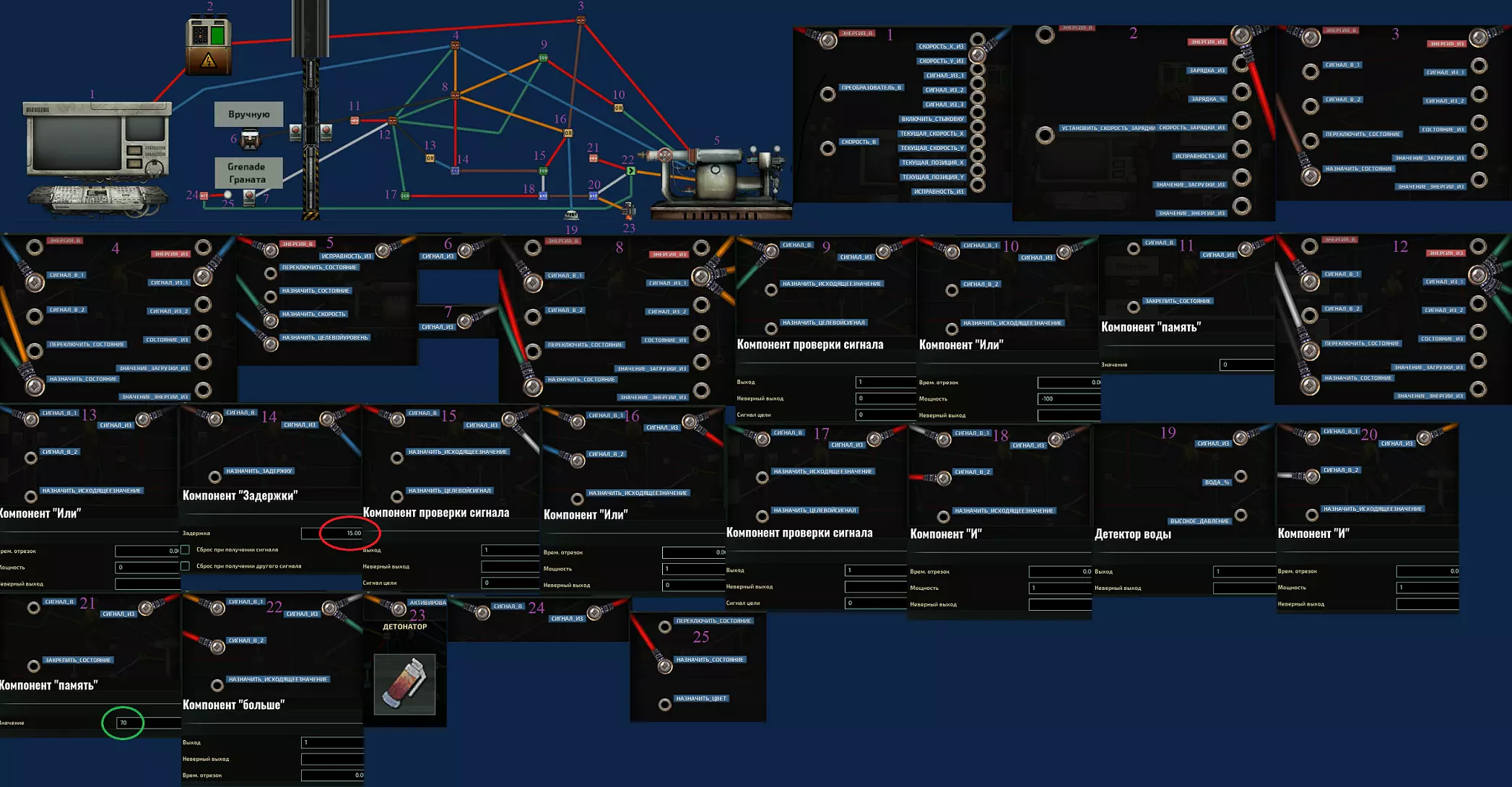
本指南提供了各种电气线路的详细示意图,即使你对电学一无所知,也能在潜艇上重现这些线路(只需按照说明机械地正确放置组件、连接导线并设置数值即可)。所有列出的技术方案都可以在原版潜艇上直接在航行过程中完成。前言 更新:本指南中提供的所有线路图(包括氧气系统和自动加热系统)以及更多内容,现在都可以在专门设计的潜艇上进行尝试!

本指南中提供的线路图很可能并非最优解,毕竟它们是由一个对电学仅有直觉性理解的醉酒矮人设计的。如果你知道优化方法或发现了错误,欢迎在评论区分享,以造福大家。不过,所有展示的线路图均能正常工作,并且能够完成各自的任务。更新:如果您在尝试打开图片进行放大时遇到错误,请点击上方链接。
最简单的反应堆自动化 更新:更新后,反应堆内置的自动化性能有所提升,而此方案已被削弱,因此其实际意义已基本消失。 最简单的反应堆自动化方法。我在还完全不懂布线的时候,参照指南一步步连接了这个线路。每个电工都必须会这个。它能保护反应堆免受过载。它最多可安全容纳4根控制棒。虽然存在更节能的自动化方式,但如果您拥有足够的控制棒及其所需矿石,且需要乏燃料,那么通过这种方式自动化的反应堆将会不经济地消耗它们。当然,如果有衰变加速器,可以手动销毁它们,或者可以专门将反应堆自动化,使其更强烈地燃烧它们,但不会过热……不过上述方法在消耗的资源量与获得的结果之间的比例上仍然是最优的。
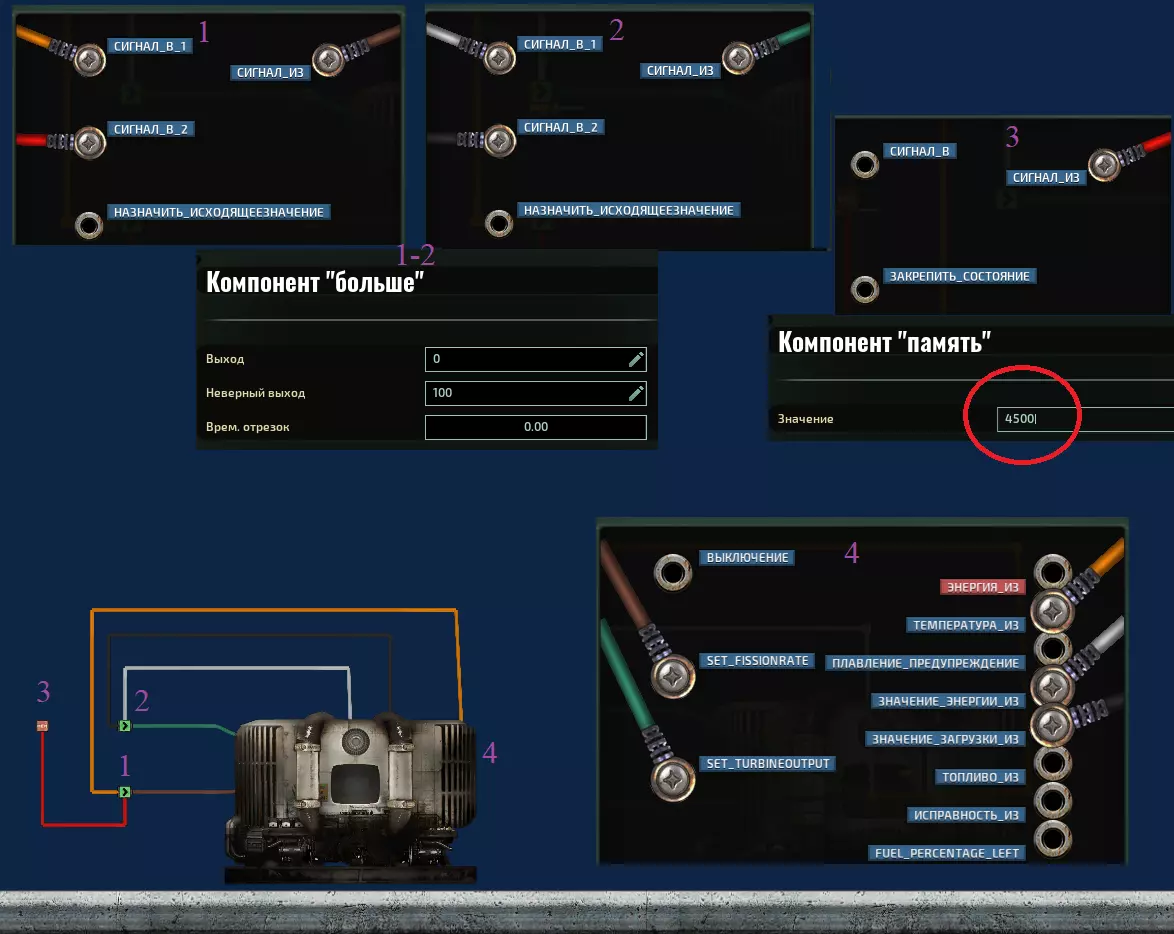
安装说明: - 安装完成后,应关闭反应堆内置的自动控制功能。 - 最大允许温度值(图中标红圈处)可进行调整,但建议不要设置得过高或过低。 - 注意,反应堆从一开始就会接入许多其他线路。不要混淆这些线路,如有可能,请使用不同颜色的线路。- 反应堆运行时指针剧烈抖动属于正常现象。 - 门和舱口的自动化 以下是门/舱口自动开关的机制:当某个舱室出现积水时,自动开启功能将被禁用,但仍可手动开门。
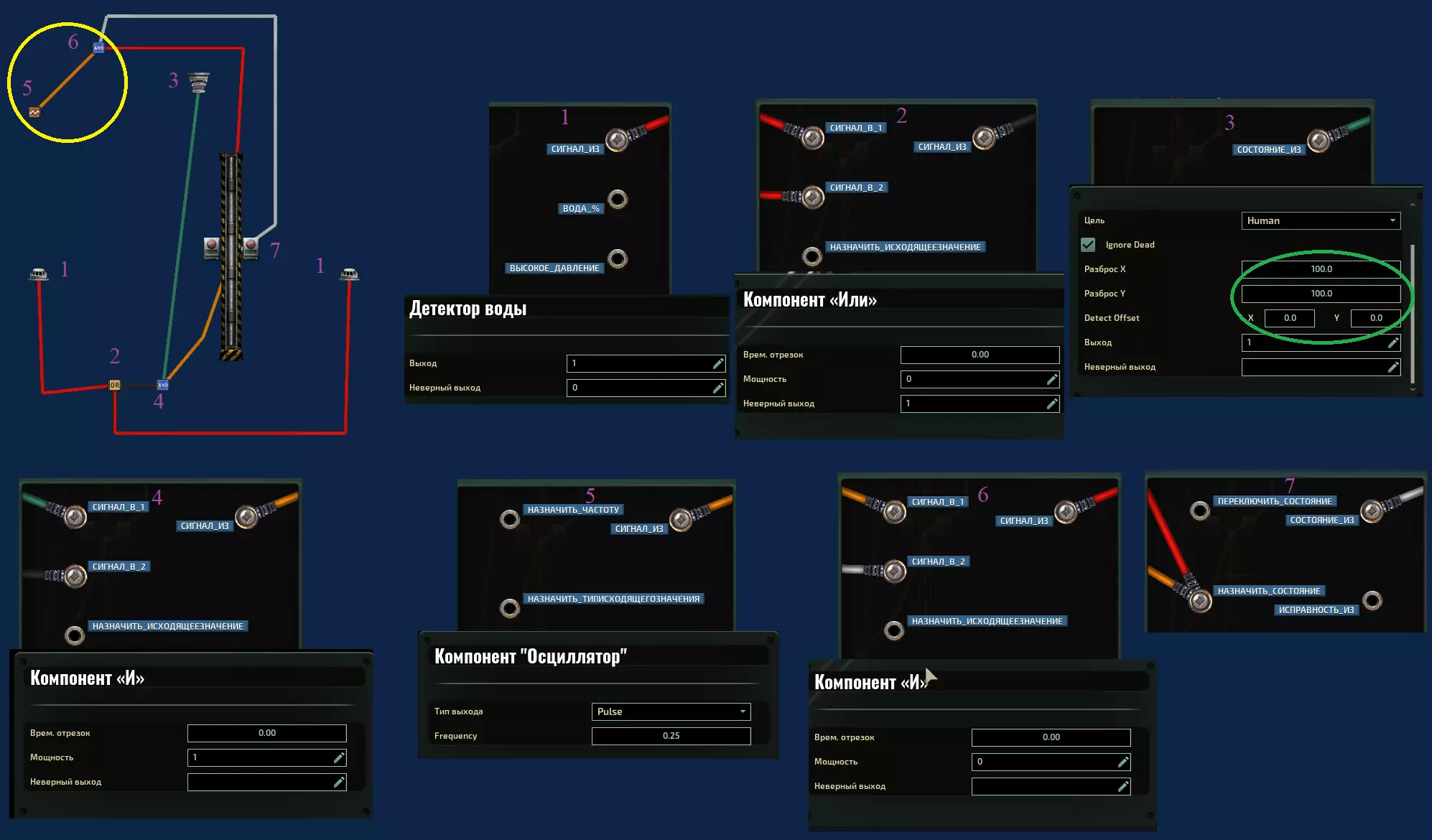
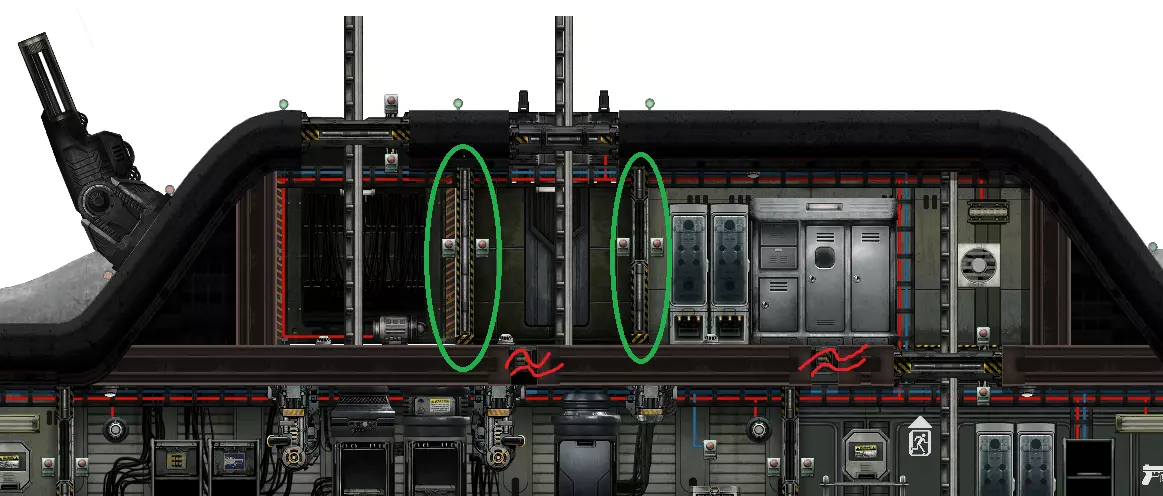
组装说明: - 可以使用舱室中的标准水位传感器(前提是它们安装正确,并且在排水阀正常工作时不会被淹没)。 - 运动传感器的距离和轴偏移量(用绿色椭圆标记)可以根据环境和传感器本身的安装位置进行重新调整。对于门,建议增加X轴的偏差范围,以便门有足够时间打开。对于舱口,或许可以将Y轴的散布范围缩小到只有当人员正在爬梯子时舱口才会开启。 - 如果为潜艇的大多数门和舱口添加了自动化功能,那么【门关闭模块】(标有黄色圆圈)通常是多余的,因为这些门和舱口一般本身就具备自动关闭的能力。但有时该模块可能会缺失,这种情况下就需要添加它。从门连接到关门模块的白色电线可以穿过延迟组件,否则,在舱室进水并手动开门时,门可能会突然关闭,需要再次按下按钮。这是因为第一次按下按钮的时刻接近振荡器周期的末尾,相应地,振荡器上会出现电压阶跃。不过这对我来说从来没造成过什么特别的困扰,所以我没有把它加入到主要方案中。 - 如果你觉得关闭模块是多余的,只需要在组件4的错误输出端设为0就足够了——千万别这么想。在正常情况下,自动系统确实能完美运行,但一旦任何舱室进水,舱门就会彻底锁死。不要重复别人的错误,这些说明都是用血泪换来的。自行尝试偏离这些设定或进行某些改装可能会带来风险,请务必考虑可能产生的后果。 关于创建互锁门/舱口: 我觉得标准的气闸门系统设计不太理想,必须先关闭内侧门,才能开启外侧门,整个过程太耗时。要是在下潜前还得用泵给舱室注水就更麻烦了。所以要快速出去,还要在水压下用头撞天花板。 打开门/舱口时,如果与之相连的门/舱口处于开启状态,系统会自动将其关闭。建议在气闸室安装此功能。
船体紧急自修复系统
该系统允许按下按钮后立即修复所有已安装该系统的舱室中的漏洞,这甚至能让小型团队避免坠入深渊或从深渊底部逃生。它通过安装在带有安装泡沫的手榴弹引信上运行。使用后,手榴弹会消耗其资源,需要进行更换。该装置允许连续触发两次无需更换手榴弹(此数量可增加)。系统配备触发计数器。更换手榴弹后,需按下按钮【1】以重置计数器。为节省手榴弹,系统在非严重受损舱室中不会启动(不过可以选择不启用此保护功能):【水探测器(7)】使系统仅在接触到水时才会被激活(将其安装在天花板下方,可判断舱室是否完全充满水,即是否存在严重损坏)。
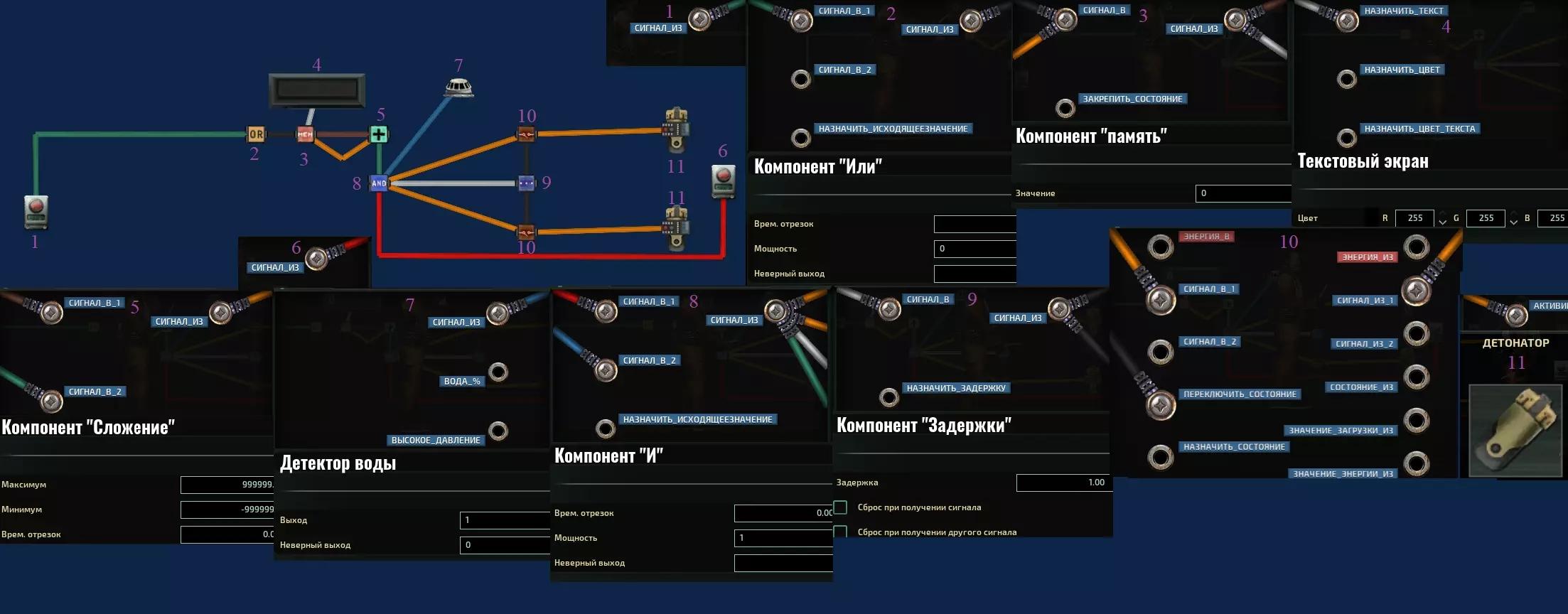
组装说明: - 注意!为确保手榴弹顺序激活系统正常工作,组装时其中一个继电器(10)必须处于关闭状态。在潜艇编辑器中,只需取消相应勾选即可实现。若直接在潜艇上进行组装,则需安装一个按钮,将其连接至继电器的“切换状态”端子,按下按钮一次后再将其移除。这个技巧在指南中的其他一些线路图中也有使用。 - 引爆器在哪里?(这里应该有一张蝙蝠侠的图片)。引爆器无法制作,但可以在军事前哨站购买。 更新:- 正如zlayapochta正确指出的那样,无需按照图示将信号线端子与水探测器连接,而是可以使用【高压】端子。- 藏在墙壁里的雷管完全可以正常使用,所以你可以用这种方式保护它们不被小丑偷走。不过另一方面,你每次都得撬开外壳才能更换手榴弹。哪个更重要——选择权在你手中。 - 可以将按钮(6)设为所有自动维修模块通用,并将其安装在船长室里,这样会很方便。可以通过将设置了数值1、2、3…的信号组件连接到计数器来增加充电次数。但在这种系统中,需要在充电前按下充电按钮。
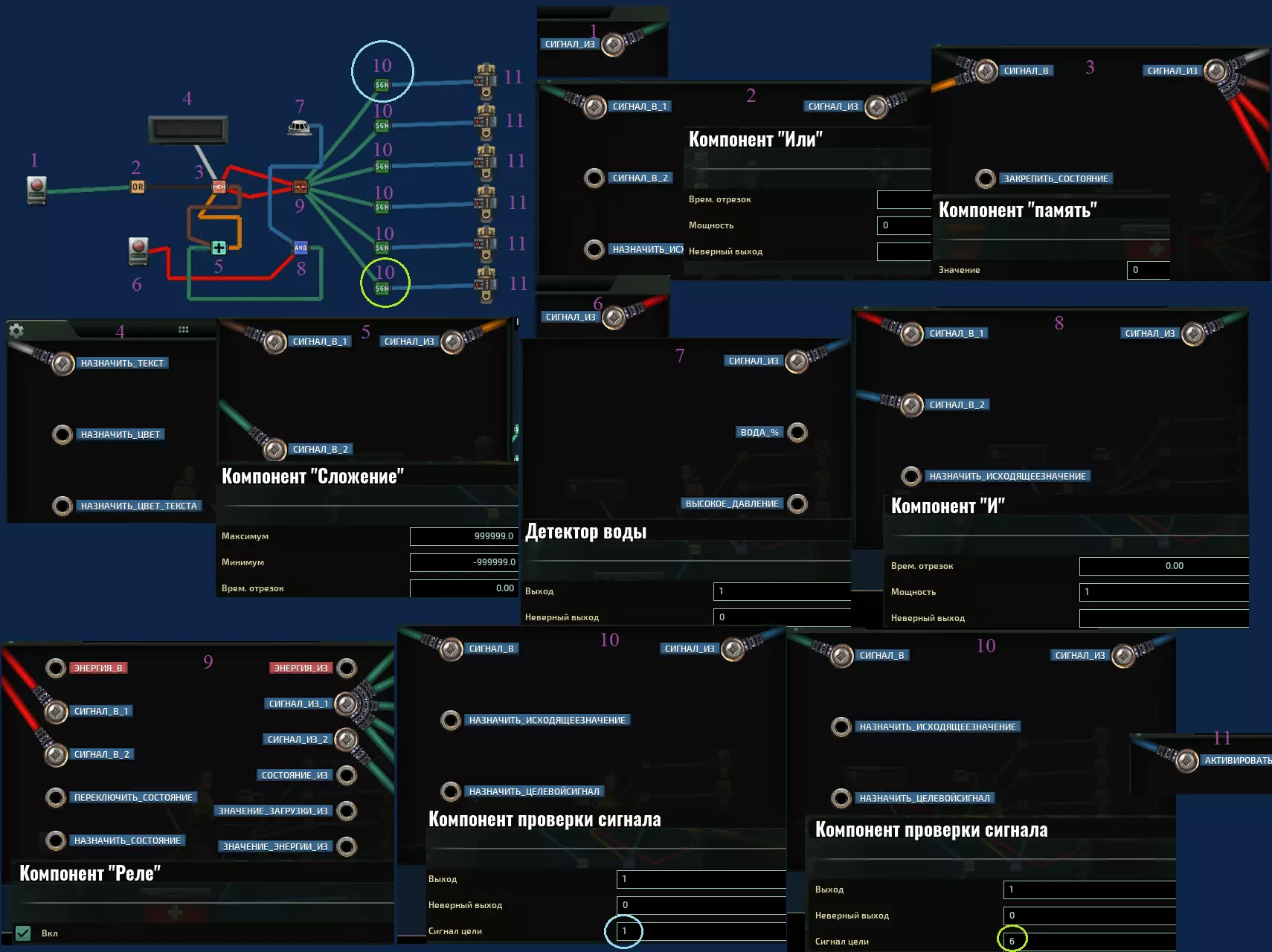
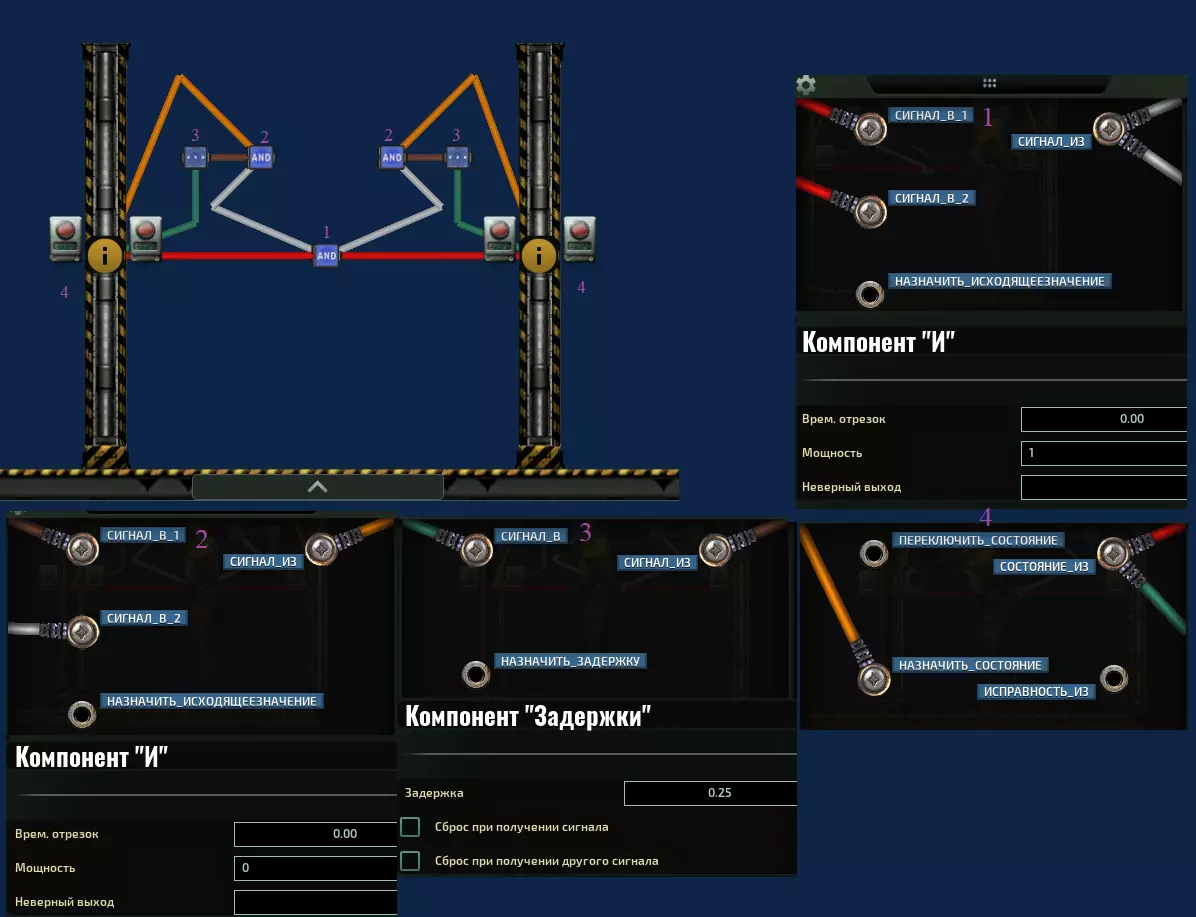
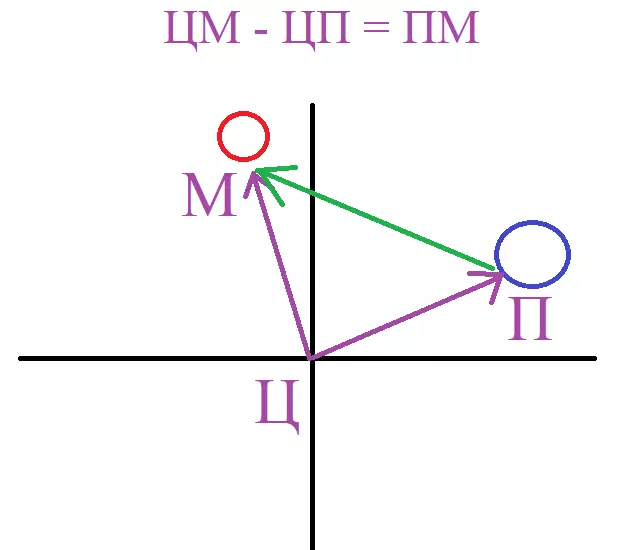
阀门自动化:排水系统的创建 排水阀门可将上层舱室的水排至下层——即排水泵处。但如果设置不当,它们很可能会淹没你的潜艇,而非帮助潜艇保持漂浮。在基础连接情况下(例如我们的Orca_2潜艇初始状态),当上层舱室有水时阀门会开启,无水时则关闭。问题在于,如果你的下层舱室破损并充满了水,而上方有一个小的无害泄漏,那么阀门会打开,以便将水排到下层舱室,但它不会排水,反而会开始淹没自己所在的舱室。而从下方涌入的水会导致阀门无法关闭,因为按照其逻辑,当上方有水时,它应该保持打开状态(见图)。
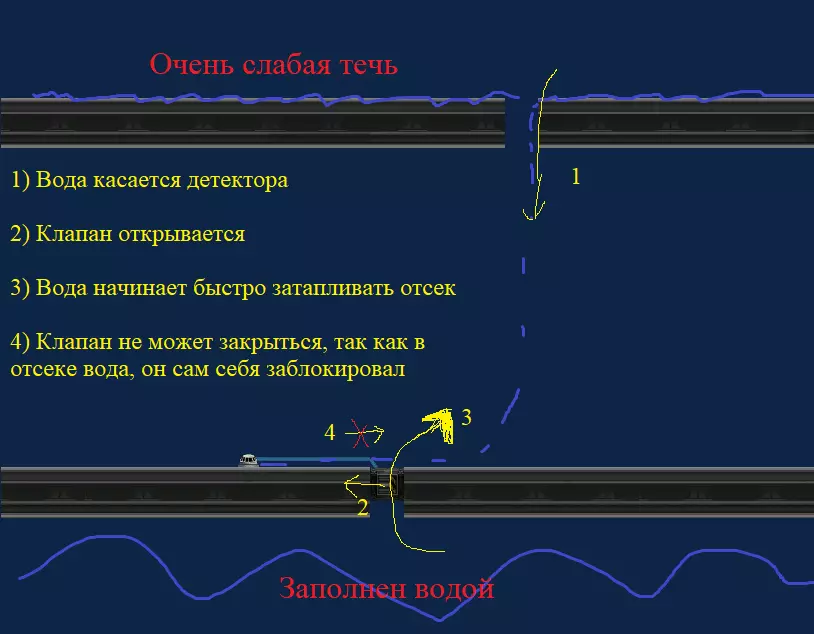
这个问题可以通过以下方法解决:切断水感测器(上部)与网关的基本连接,转而向网关输入来自AND组件的信号。该AND组件接收来自同一水感测器(上部)以及已安装的水感测器(下部,已反转)的数据。
组装说明: - 上部水位传感器可使用基础款,但需切除原有的连接部分。 - 不要忘记将安装在下方的水位传感器反转,并在AND组件的错误输出端添加0(否则阀门将无法关闭)。 - 放置下部水位传感器时需评估周围环境。它不应放置在从上部排水舱口到下部排水舱口或水泵的地面路径上,更不应该直接位于舱口下方。最好将其整体抬高至地面以上,如果要对进入压载舱的过程进行自动化操作,那么应将其安装在靠近天花板的位置(见图)。
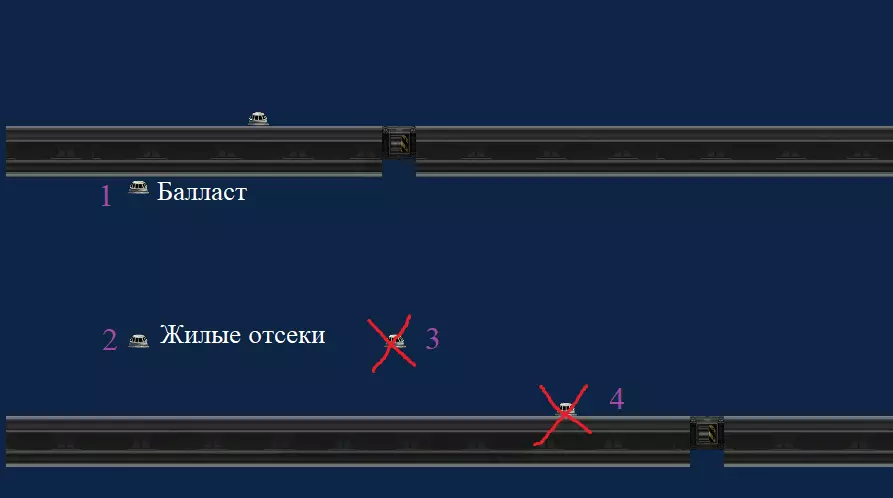
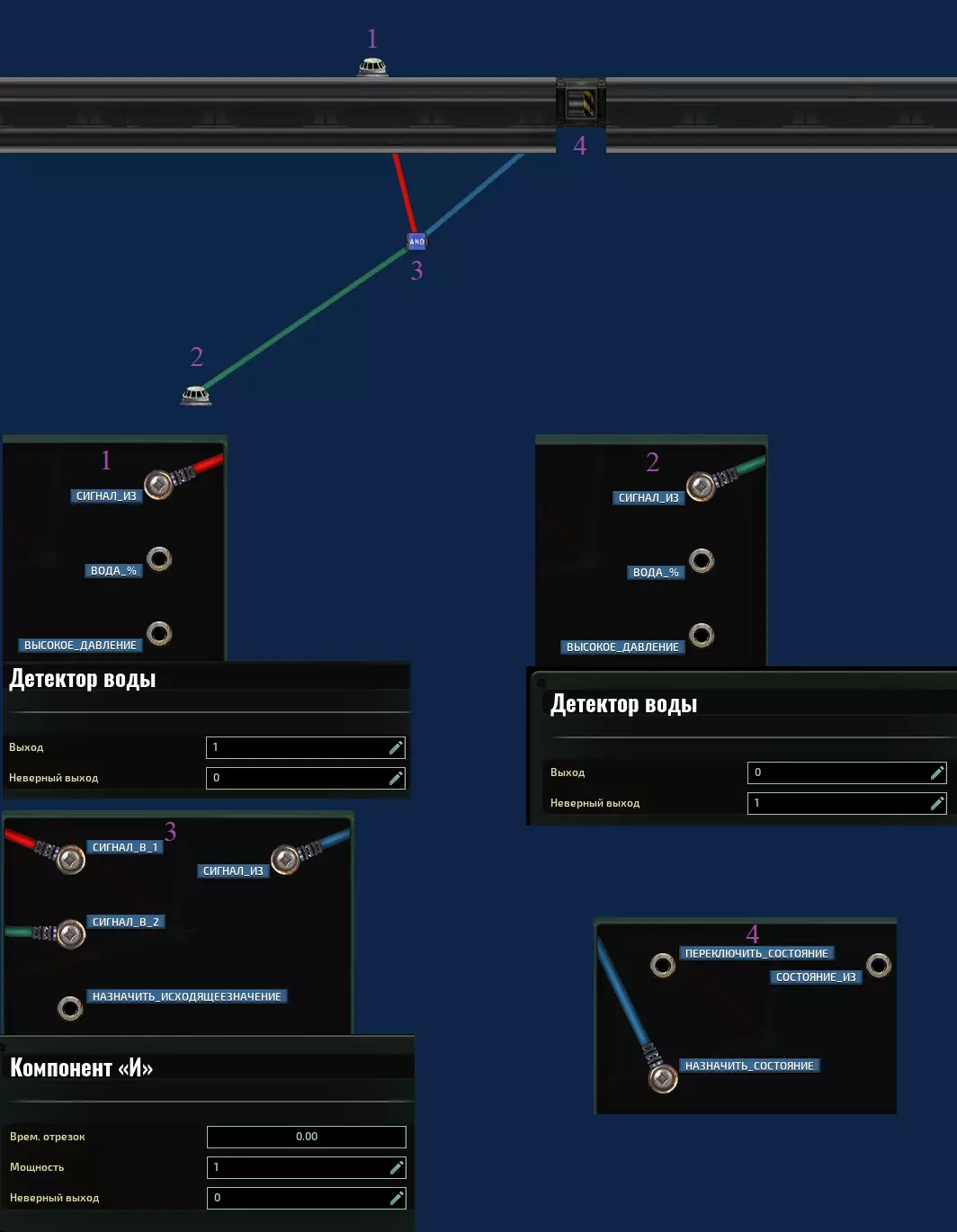
更新:正如zlayapochta所指出的,使用水检测器可以直接获取舱室中的水量百分比,因此无需费力安装第二个检测器。只需将舱室内现有检测器的相应端子连接到【>】组件的下端子,上端子则连接到存储组件,并在存储组件上设置舱室中水量的百分比阈值,当达到该阈值时阀门将关闭。有时候完全关闭排水阀也无妨。例如,在虎鲸级2型潜艇(Orca_2)的情况下(见图),建议直接关闭排水阀,并在舱门上设置有水时自动开启。
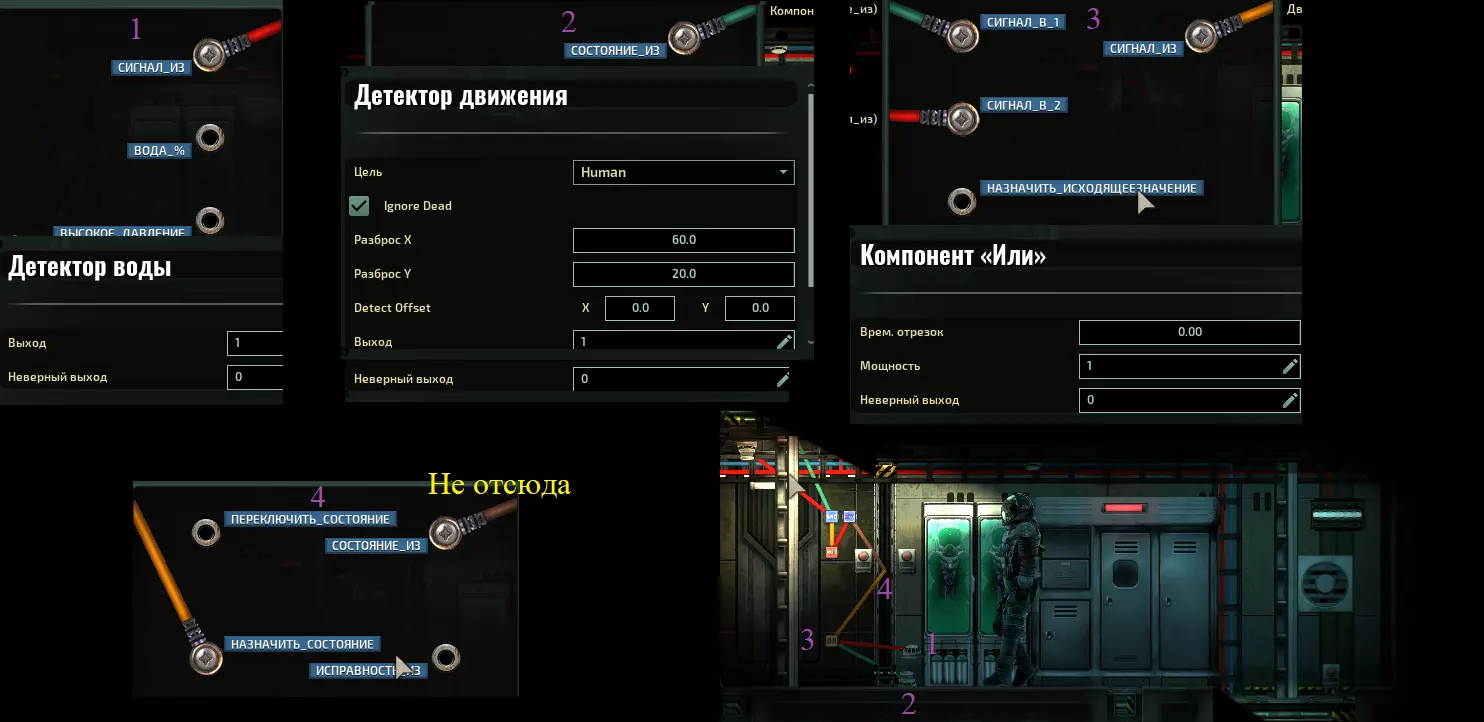
此时只需与右侧水传感器建立连接。自动关闭模块是多余的,因为当附近没有人或水时,门仍然会关闭。只需断开门的所有原始布线,否则门可能无法正常工作。建议将右侧水探测器略微抬高至地面上方,因为该位置存在缺陷,会导致地面残留一薄层水,这可能会影响门的正常运行。 如果水进入右侧的舱室,门将打开并让水流向水泵。但如果每个门左侧的舱室破损,门将不会打开,淹没区域也不会扩大。这些操作能大幅限制潜艇顶部的损伤,防止其导致潜艇沉没。同时,在非危急情况和轻微损伤时,潜艇的功能性和操控性甚至会有所提升。 将对接舱口改造为舱门 有时不仅想在空间站使用对接舱口,还希望能在航行时将其当作普通舱门使用。我对电力的兴趣是从舱门开始的。当时我和同伴们发现,我们的Orca_2号潜艇上的舱门坏了,打不开。我花了好长时间尝试在外面装按钮,结果把舱门锁死了,导致我们没法从空间站回到潜艇里;还有一次在航行途中打开舱门,结果让舱室进了水……不过,最终还是能把它改造成好用的状态。主要问题在于无法在外部设置舱门开启按钮。 一个不错的解决方案是安装一个运动传感器,并对其Y轴进行调整,使其仅能感应到潜艇外部一小块用于进入的区域内的人员,而离开时则使用带延迟的按钮。 如果想要实现完全自动化,可能会遇到例如水流将人冲出传感器感应范围的问题。而如果尝试将其与排水系统相结合……总之,方案有很多,每个方案都需要解决问题,而将它们组合起来,问题就更多了。以下是针对虎鲸2号的解决方案,该方案结合了上述排水系统和下层门的自动化功能。

自动对接 当操纵杆(1)处于下压状态时,将自动与空间站进行对接,而分离操作需通过终端上的对应按钮进行。该系统是对接端口标准预设的附加功能。若未通过组件(3)进行对接状态检查,可能会因瞬间反向分离而无法返回空间站。
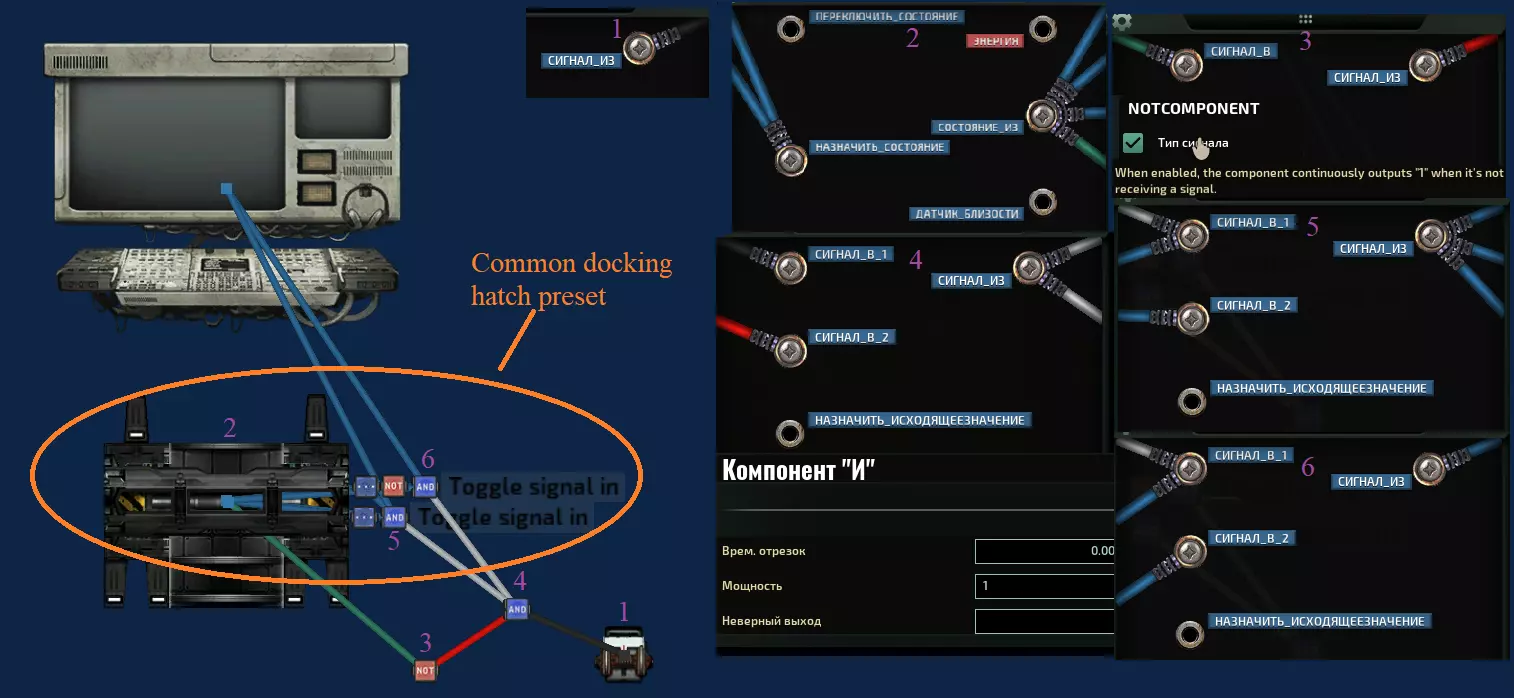
然而在无人机的情况下,该系统运行不佳,因为无人机与潜艇脱离时不会产生间隙,会立即重新对接(任务加载时潜艇不会紧贴空间站生成)。因此建议不要使用标准的对接端口预设,而是手动连接所有部件。在这种情况下,操纵杆可以随时被按下,因为当按下分离按钮时,自动对接会暂时停用。
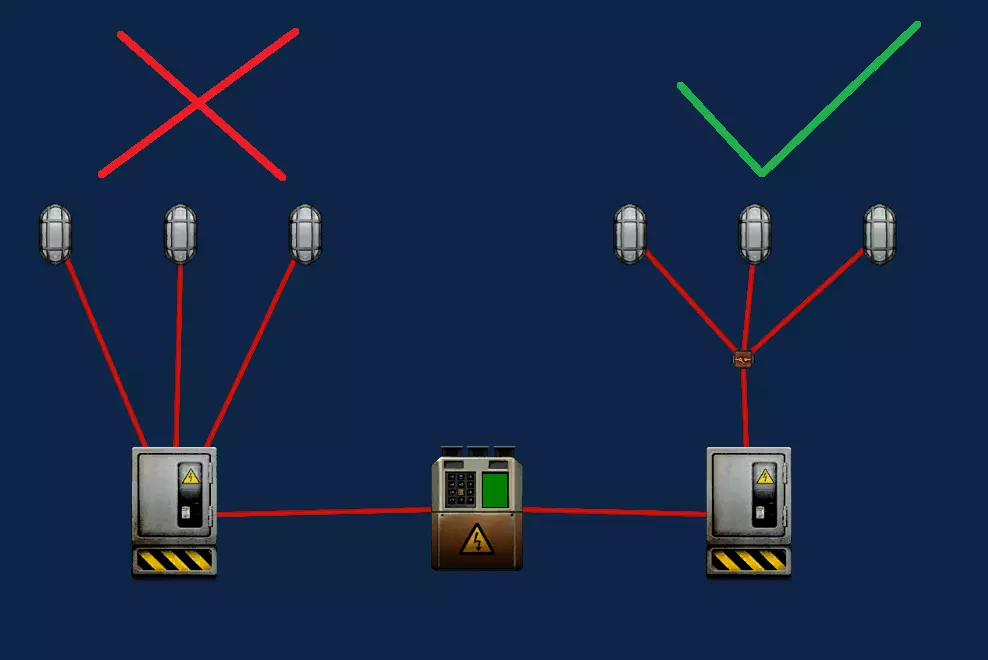
照明线路修复 在原版潜艇上,连接到灯具的电线直接从配电箱引出,这是一个非常糟糕的技术解决方案。由于总接线端子的限制,配电箱的电线数量非常有限,而潜艇上的灯具却很多。结果你会得到一个布满完全无用电闸的配电板,这些电闸还得经常修理(这或许对提升电工技能有帮助,顶级工程师能瞬间修好它们,但还是很让人恼火)。更正确的做法是从某个配电箱引出一根电线连接到继电器,再从这个继电器分支出其他继电器,最终连接到灯具。继电器无需维修,其1000千瓦的最大允许功率足以给潜艇上所有的灯供电,甚至还有余量。此外,可以给第一个继电器连接一个开关,以便在需要时关闭灯光(如果将这样的开关连接到末端继电器,还可以关闭特定舱室的灯光)。
创建警报系统 有时可能会发生这样的情况:你没注意到反应堆里的燃料棒用完了(如果潜艇依靠电池进行备用供电,电池电量也可能会耗尽)。这种情况非常危险,如果再叠加其他问题,可能会急剧恶化处境。警报系统能让你注意到即将耗尽的能源,从而提前采取措施。
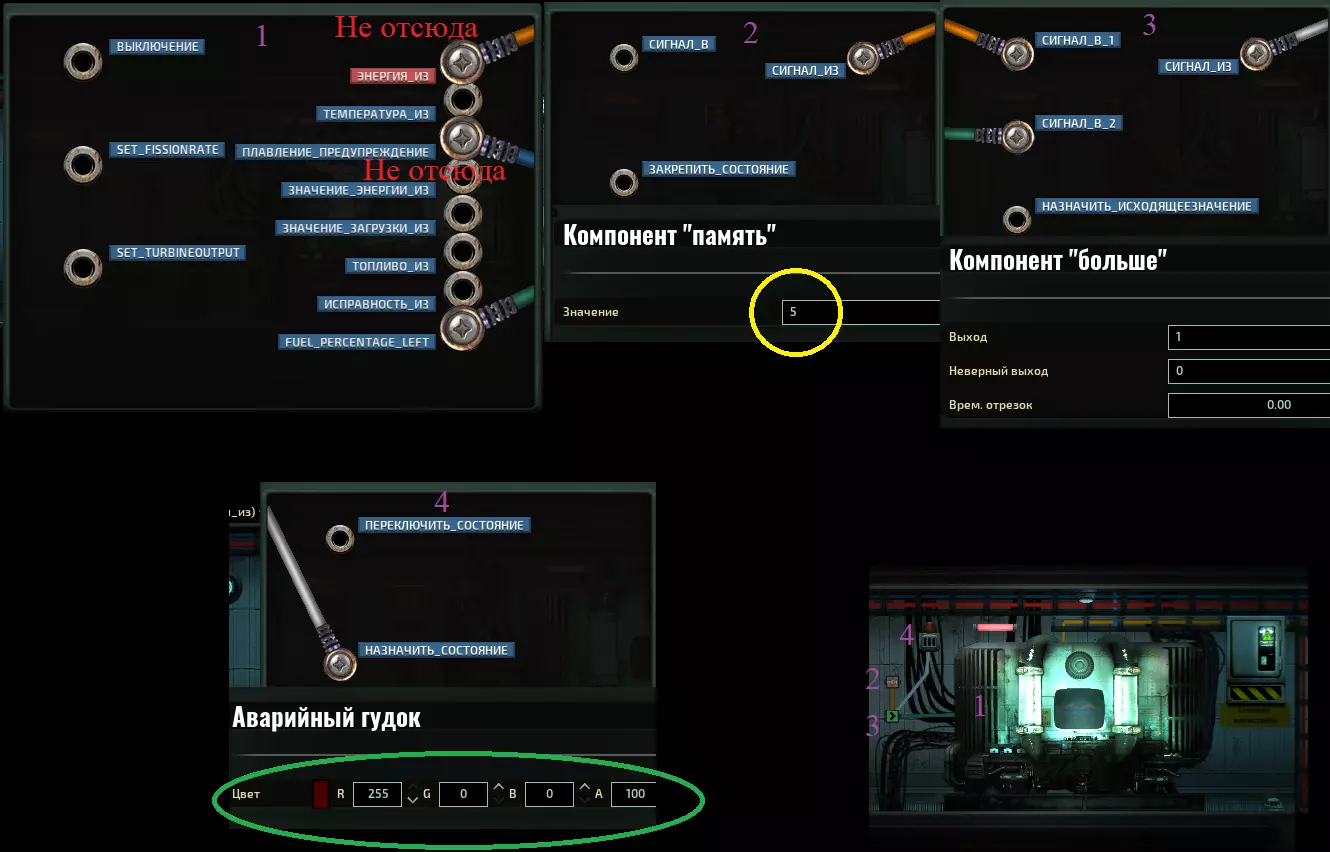
组装说明: - 内存组件的数值(黄色圆圈标记处)为所有剩余核心的【总百分比】。即若该数值为4,插入一个核心时,当核心剩余4%强度会触发警报;同时插入四个核心时,当每个核心剩余1%强度会触发警报。因此建议单个核心设置为4-10%,四个核心设置为8-16%。- 可根据个人喜好调整【警报蜂鸣器】(绿色椭圆标记处)的颜色和亮度。 - 建议安装多个蜂鸣器,以覆盖您最常出入的舱室。如果团队规则允许且其他船员无强烈反对,也可以在他们的舱室安装蜂鸣器。到时候整个潜艇的人都会提醒你该换控制杆了))) 反应堆警报在客观上是有用的,但在某些情况下,其他类型的警报也可能派上用场:比如,通过移动传感器来提示怪物的存在,或者通过舱门传感器来提示舱门被未授权打开。深水炸弹发射按钮和放电线圈激活按钮的位置调整 深水炸弹发射按钮初始位置可能设置不当,导致船员误触,或因其他原因需要调整位置。将其直接移至船长终端附近会更为方便,这样船长能更清楚地看到炸弹的落点。船长终端有3个信号端子,其工作方式与标准按钮类似。当有设备连接到这些端子时,船长在使用终端期间,左侧界面会显示相应的按钮。 而放电线圈或许可以通过额外连接到其所毗邻的舱室,这样位于该舱室的人员通常能更及时地激活它们。不过最好的解决方案是放电线圈,对吧!实现自动化。详情如下。
放电线圈自动化 放电线圈会在怪物接近时自动触发,但当作用范围内有人员或宠物,或者为其供电的电池剩余电量低于设定百分比时则不会触发。对于大范围作用区域,建议在整个区域内安装多个运动传感器。
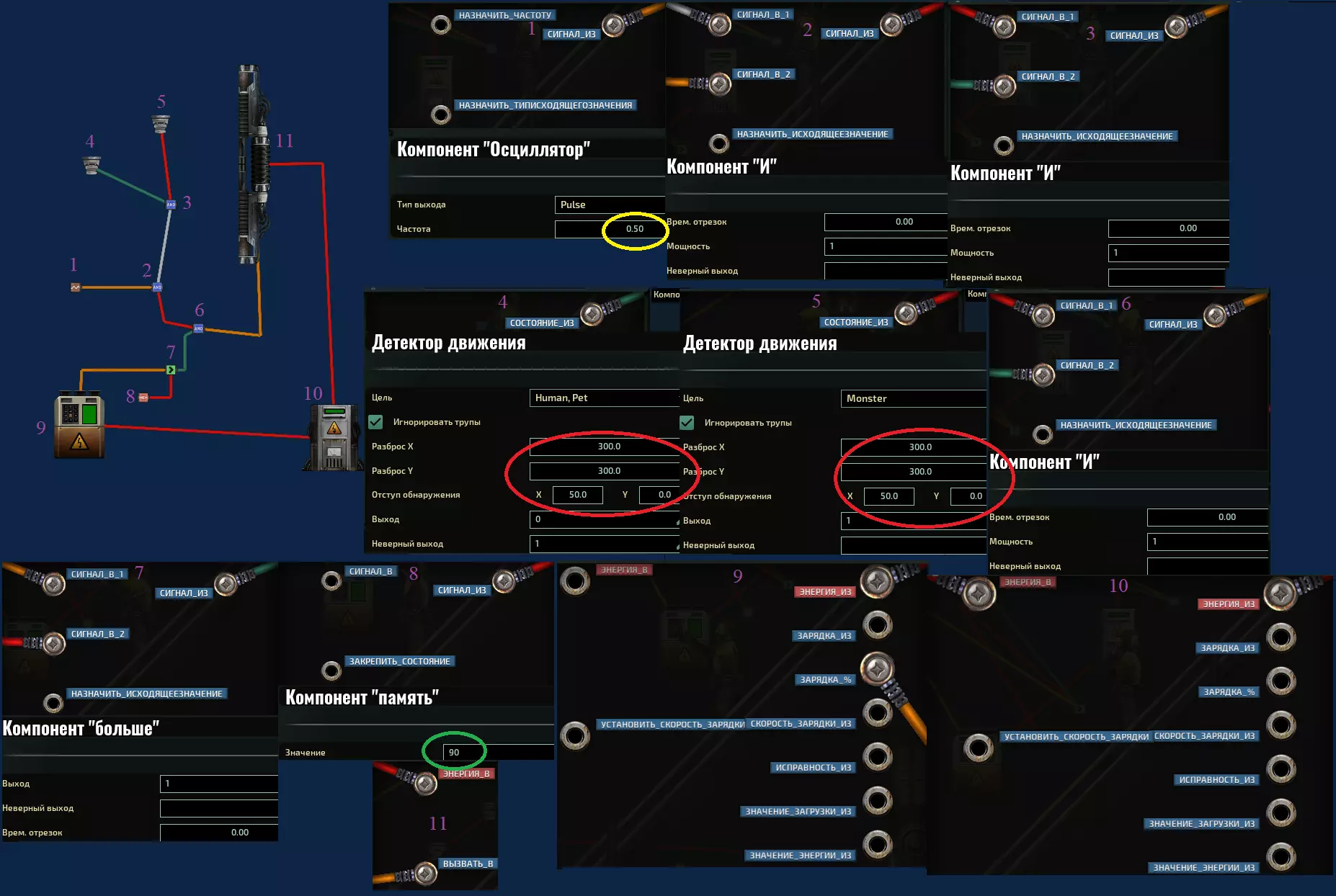
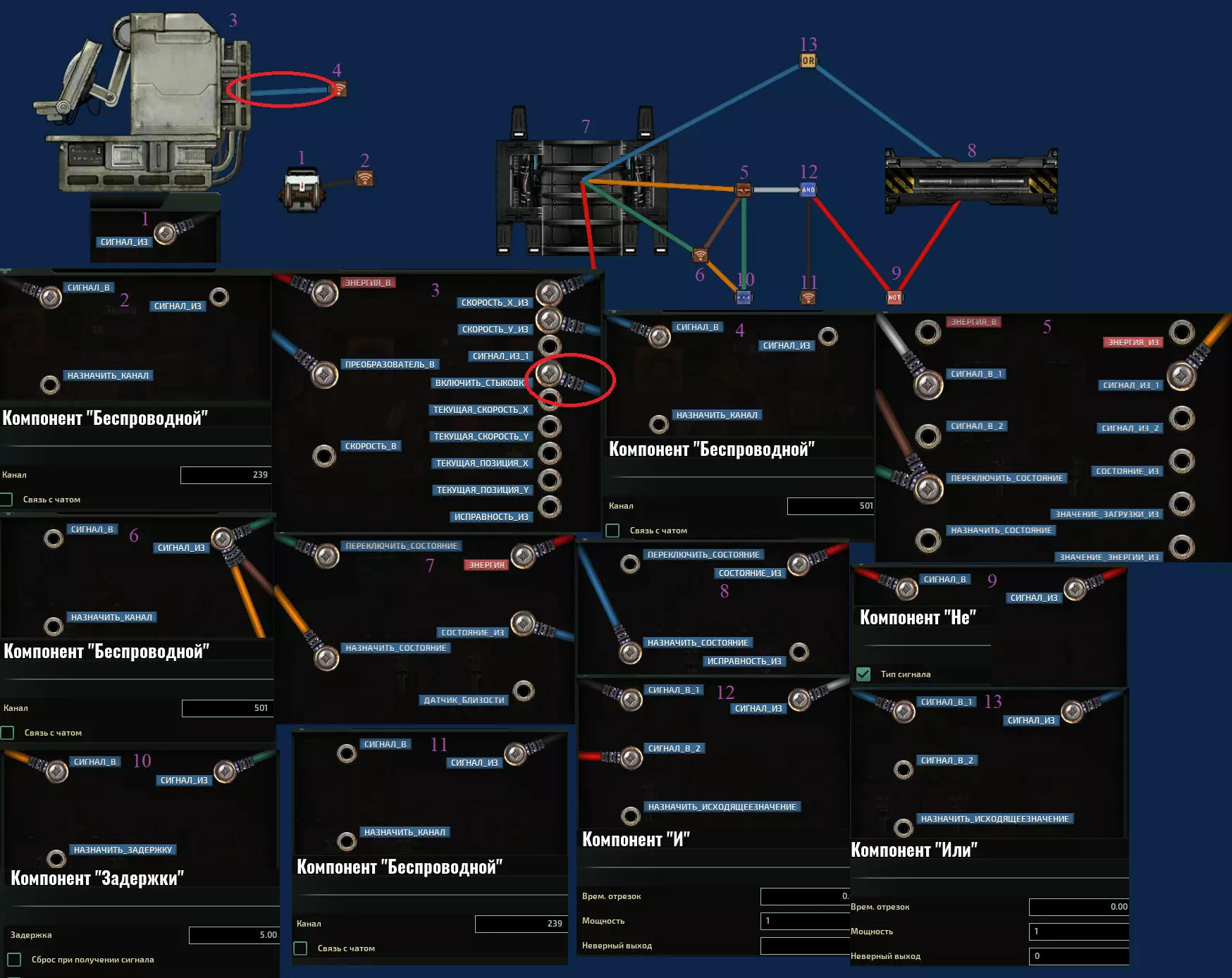
组装说明: - 根据lumiscent的合理指出,如果超级电容器电量耗尽,但运动传感器仍在发出信号,线圈会尝试释放电荷,但电量不足,超级电容器会耗尽所有储存的能量,却不会产生任何效果。因此,建议将内存组件的数值设置为不低于25,并且连接到“>”组件的橙色导线不应从电池引出,而是从超级电容器的“电量百分比”端子引出。 - 传感器的检测区域(用红色椭圆标记)需要在每个具体情况下手动设置。此时,这些区域应当重合(最简单的方法是将两个传感器依次叠放在一起)。- 电池剩余电量百分比(绿色椭圆标记)可让部分电池保持充电状态,且数值可能会有所变化。 - 探测器的信号检查频率(黄色椭圆标记)同时也是探测器在检测到信号时的触发频率,这会导致超级电容器电量快速消耗,因此建议设置下一次放电的延迟时间。机枪自动上膛 该方案可在激活潜望镜(或连接到组件2的任何其他坐标传输信号输入时,表明可能即将开始射击)时自动为机枪上膛。在此状态下,按下扳机即可几乎立即开火。同时,在射击间隙的停顿期间,机枪的旋转状态将被保留,而当离开潜望镜(或停止坐标传输)时,旋转状态将停止。
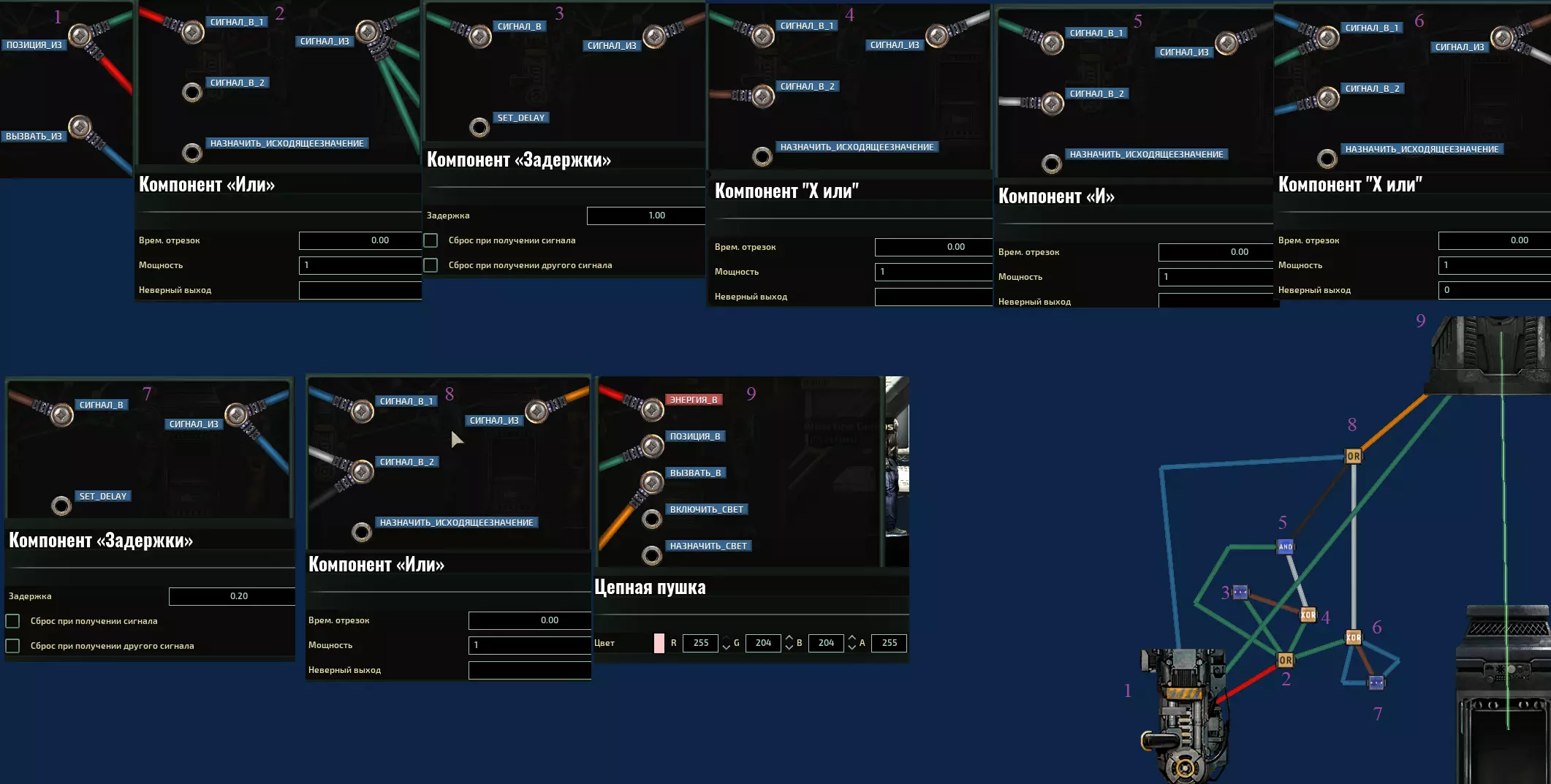
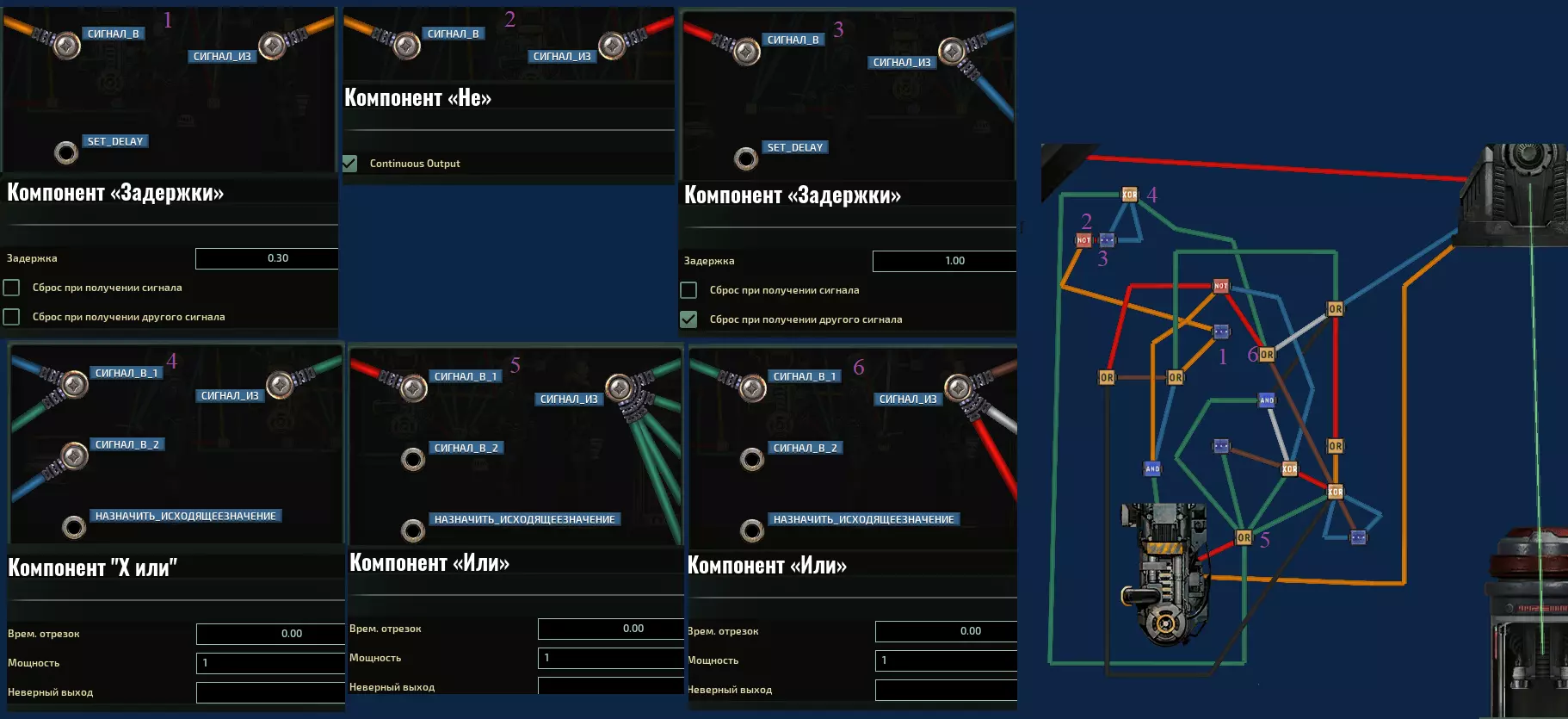
组装说明: - 注意!如果枪械师角色提升了武器装填速度技能,截图中显示的延迟组件参数将无法使机枪正常工作。此时,组件(7)上的数值不应设为0.20,我建议在任何情况下都将其设为0,即使船上没有该角色。而对于组件(3),若要该角色正确使用,其数值需设为小于1的数值。具体数值需根据角色的电力技能点数单独计算。关于如何通过按下操纵杆实现延迟时间的便捷切换,可在下一节中查看。 - 组件OR(2)和(8)仅用于方便重新布线。这些电线也可以直接从潜望镜引出或连接到机枪。 - 只能通过组件(6)和(7)来维持旋转。组件(3)、(4)、(5)仅用于机枪的初始旋转。 - 如果你想实现持续旋转,只需将电线连接到组件(2),但不是从(1)引出,而是从任何能发出持续信号的组件(如下压的杠杆)引出。激光自动预热 以机枪自动旋转的原理为基础,对其进行修改以适用于脉冲激光。该任务的主要难点在于激光需要在每次射击后进行预热。同时需要对开火指令设置限制(鼠标点击的持续时间各不相同,虽然这并不明显,但每次这样的点击都会给激光传递多余的能量,打乱充能节奏,而我们希望射击能够在按下扳机时立即进行)。最终我们不再需要长按激光按钮一秒钟,同时还要在这一秒内瞄准目标,这将显著提高射击精度。
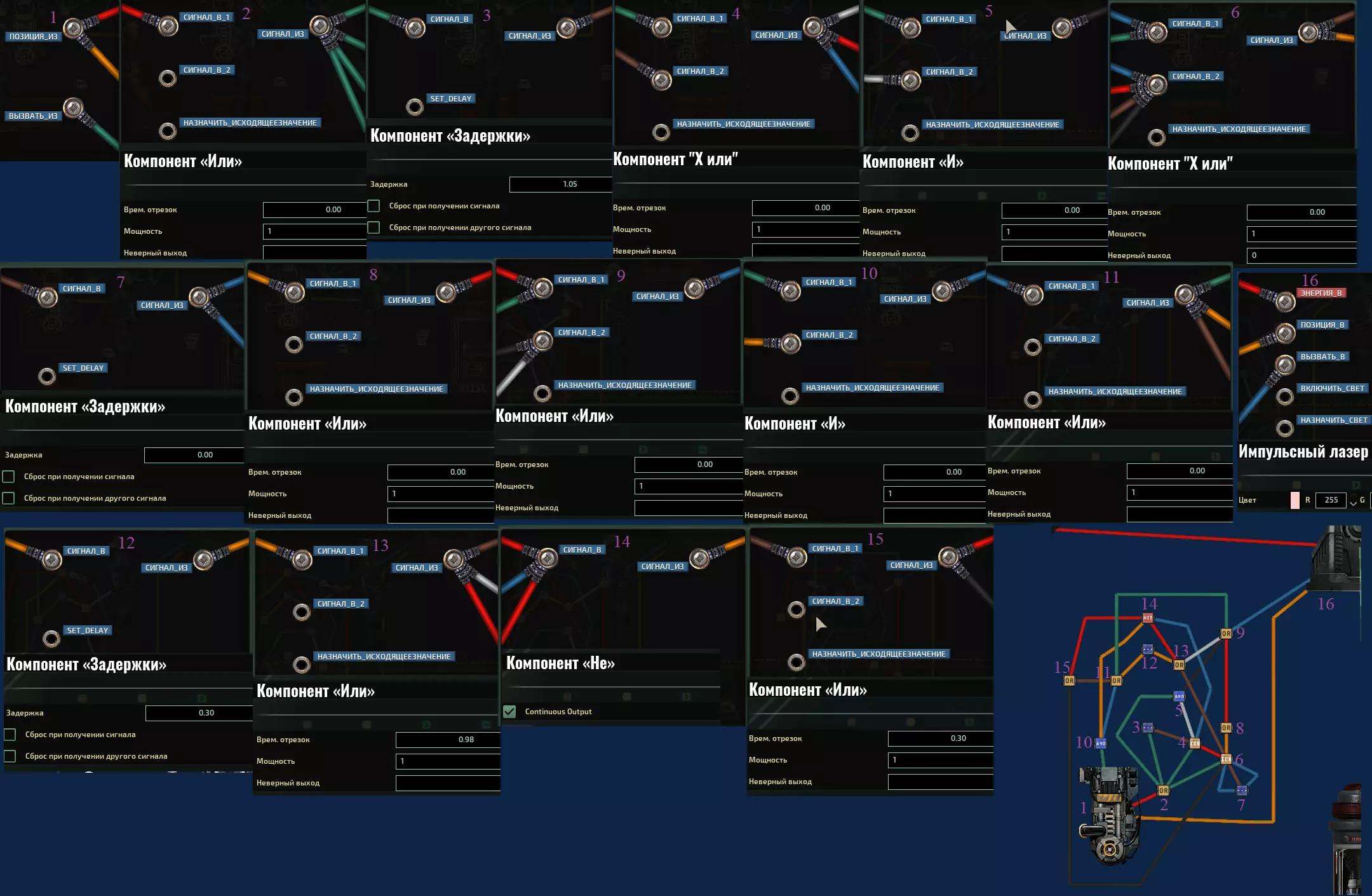
建议将组件(13)设置为1,而非0.98。总体而言,可能会出现误差,在其他情况下可能需要进行细微调整,但通常不应如此。 组件(3)、(4)、(5)负责潜望镜开启时激光的初始充电,而组件(6)和(7)则如同学校铃声的原理一样不断闭合和断开电路,负责维持储存的电量。(12) - 实现激光开始充能前的短暂延迟(射击后有一小段时间激光尚无法充能。若不将这段时间单独区分并直接设置充能时间,部分充能时间会丢失,导致激光充能不足,从而破坏充能节奏)。(13) 直接负责首次射击后的所有激光充能过程。(10)和(14)不允许读取激光充能期间的点击,以避免打乱节奏。 组装说明: - 注意!图示中的系统在由携带加速武器充能 perk 的电工操控激光时无法正常工作。这种情况下,在设定时间内激光充能会过强,导致失控发射。为避免此类情况发生,需要针对每位工程师的具体情况来调整激光。不存在通用数值,因为充能速度的提升取决于拥有该专长的角色的电气工程技能值,而该技能值可能各不相同。基于此,应当减少组件(3)的时间以及组件(13)的时间间隔值。对于电气工程技能100+135的情况,理想数值应为0.48。在其他情况下,可以根据你的电力点数计算/选择数值。(技能系统重做后,该评论不再适用。除非是用于加速充电的电池背包) 若要更改延迟组件的时间,建议安装一个杠杆、两个OR组件和一个NOT组件。在OR组件上会显示时间数值,可通过扳动操纵杆在这些数值之间切换,以便让船员都能便捷地操作武器。
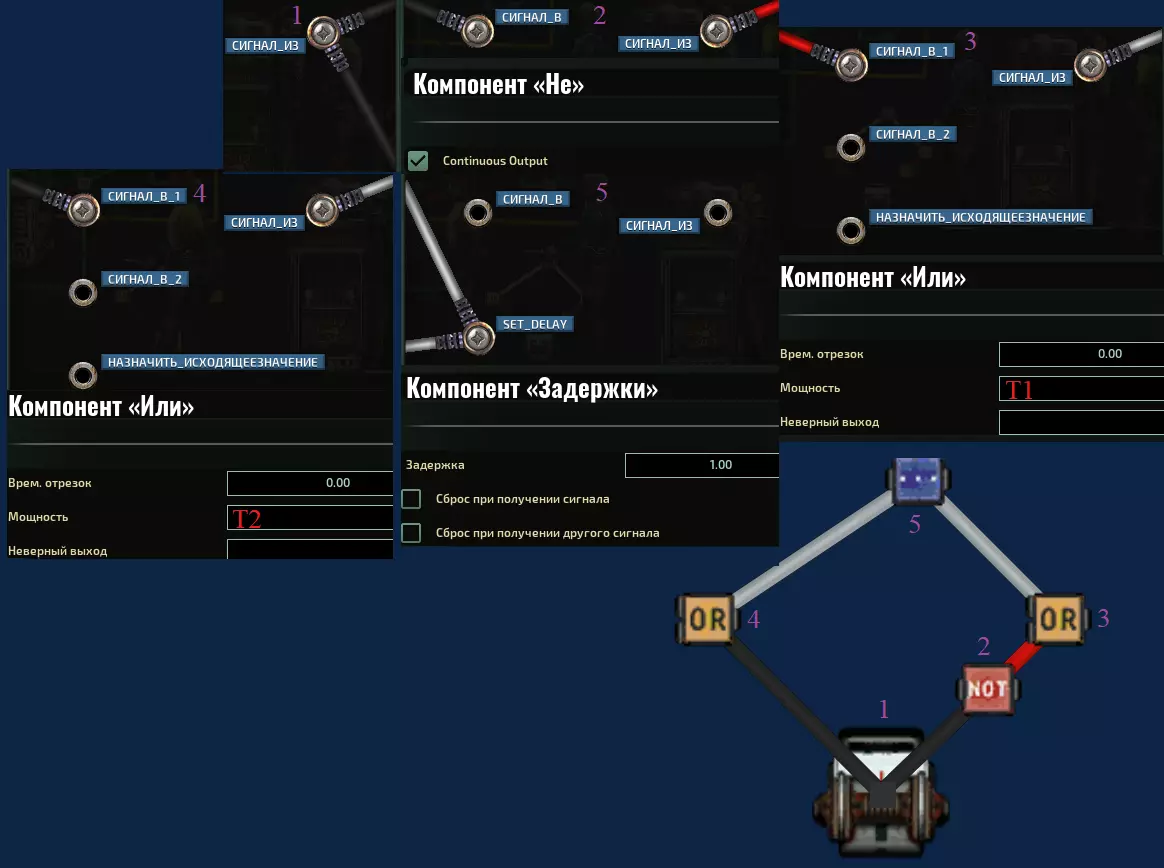
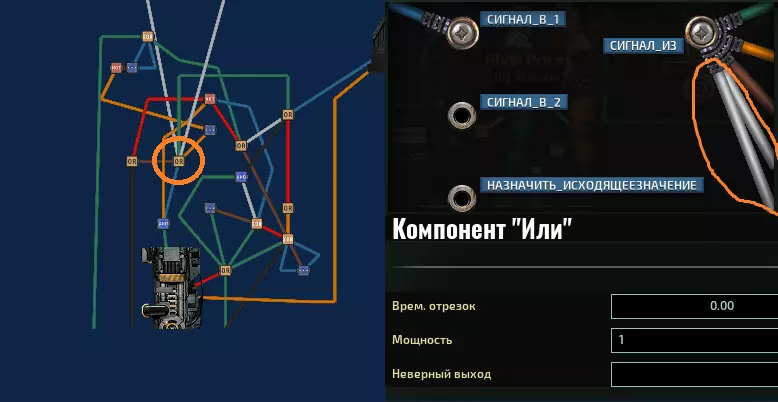
实际上,只需要一个或门组件,由杠杆触发,其输出端和非输出端分别设置为T1和T2值即可。 在这种连接方式下,延迟组件本身的时间可能需要设为0。不确定如果通过其他组件来设置该组件的时间,是否会对其产生影响。由于组件(13)的时间变化可能会出现问题,因此最好稍微调整一下电路,以便在延迟组件上设置充电时间。
在组件(1)和(6)(上一张图中的(12)和(13))之间已连接线路,现在可以调节延迟组件(3)的充电时间。组件(6)现在的信号持续时间为0。 注意!系统可能会周期性失步。我不确定原因,但可以通过对初始值为1.00(0.48或其他您设置的值)的延迟组件数值进行小幅修改(0.01-0.02)来修复。如果火炮装填未满——增加装填量。如果装填过量并开火——减少装填量。 可能已找到解决方案。观察发现,当略微调整延迟组件的时间后再将其恢复至原数值,问题可能会得到解决。由此得出结论,问题出在延迟组件的工作异常上。此外,还发现原本运行良好的系统在通过Ctrl+C - Ctrl+V复制粘贴后会【失去同步】,而且偏差值始终相同。因此,要获得能完美运行的系统,你需要对激光炮进行【筛选】,也就是设置合适的时间值(1.00、1.05、0.30 - 我这边)然后复制系统,检查枪支,如果装填不是很理想 - 再次复制,但这次复制副本本身(制作副本的副本,因为我之前说过,复制时参数的偏移量总是相同的)。如此反复,直到获得理想的系统。 弹药控制 该系统可以在屏幕上显示武器中剩余的弹药数量。为了将数值重置为初始值,请在更换弹匣后按下按钮(9)。为节省空间,一个屏幕上会同时显示两门火炮的信息。这对于监控自动炮塔的弹药或提高装填手操作【舰载武器系统】(СЗО)的便利性可能会有所帮助(见下文)。 所示示意图针对激光炮进行了优化,链式炮的参数也将一并提供。

白色导线连接至(1)传递开火信号。请注意,激光炮开火前存在延迟。在下图所示的与自动加热系统线路图配合使用的情况下,需从哪个组件引出导线。当然,一门炮只需连接一根白色导线(图中显示为2根,但实际是指两台不同武器各连接一根)
不同类型的弹药箱中,射击次数各不相同!蓝色标记处为射击次数的初始值设置位置(对于三激光枪来说是29)。粉色标记处有两种射击次数选项,可通过开关(5)在这两个选项之间切换。黄色和红色标记的是弹药数量,此时显示器颜色会分别变为黄色和红色,有助于进一步引起注意。 对于链式武器,建议将绿色标记处的值设为0.25,弹药数量设为1000和800(针对【绿色】弹药),或者分别设为0.125、500和400。 如果您想将该系统与【СЗО】一起使用(参见在持续射击模式下,需要进行额外调整。来自【1】的信号不应直接传输至【2】,而应分为两条路径。第一条路径需从【1】连接至继电器的信号端子,再由此传输至【2】。第二条路径则是从【1】连接至分配组件(我设置为4路分配,将带有对应数值的存储组件连接到分配组件的空闲下方输入端)。从元件引出导线连接到另一个继电器的信号输入端,再从该继电器连接到元件(2)。第一条线路上的继电器初始为开启状态,当应急电源开关闸刀闭合时关闭。第二条线路上的继电器初始为关闭状态,当应急电源开关闸刀闭合时开启。由于继电器有两个信号接口,可使用一个继电器控制两个发射器,但只能用于同一线路的信号。为门和船长终端设置密码 更新:我承认自己是个十足的傻瓜,因为没注意到控制台的清除按钮,感谢Serpent-Tempter提醒我。现在控制台在输入后会自动清除密码。 该系统既可以用于娱乐,也可以在角色扮演服务器上使用。它比门上的锁定开关更好用,因为当门上【没有内置按钮】时,就不用再用螺丝刀去戳了。 门会保持关闭状态。只有两种情况会打开门:有人从内部按下按钮,或者有人从外部输入密码。密码在信号检查组件上设置(用绿色椭圆标记)。门的开启时间在延迟组件上设置(用黄色圆圈标记)。
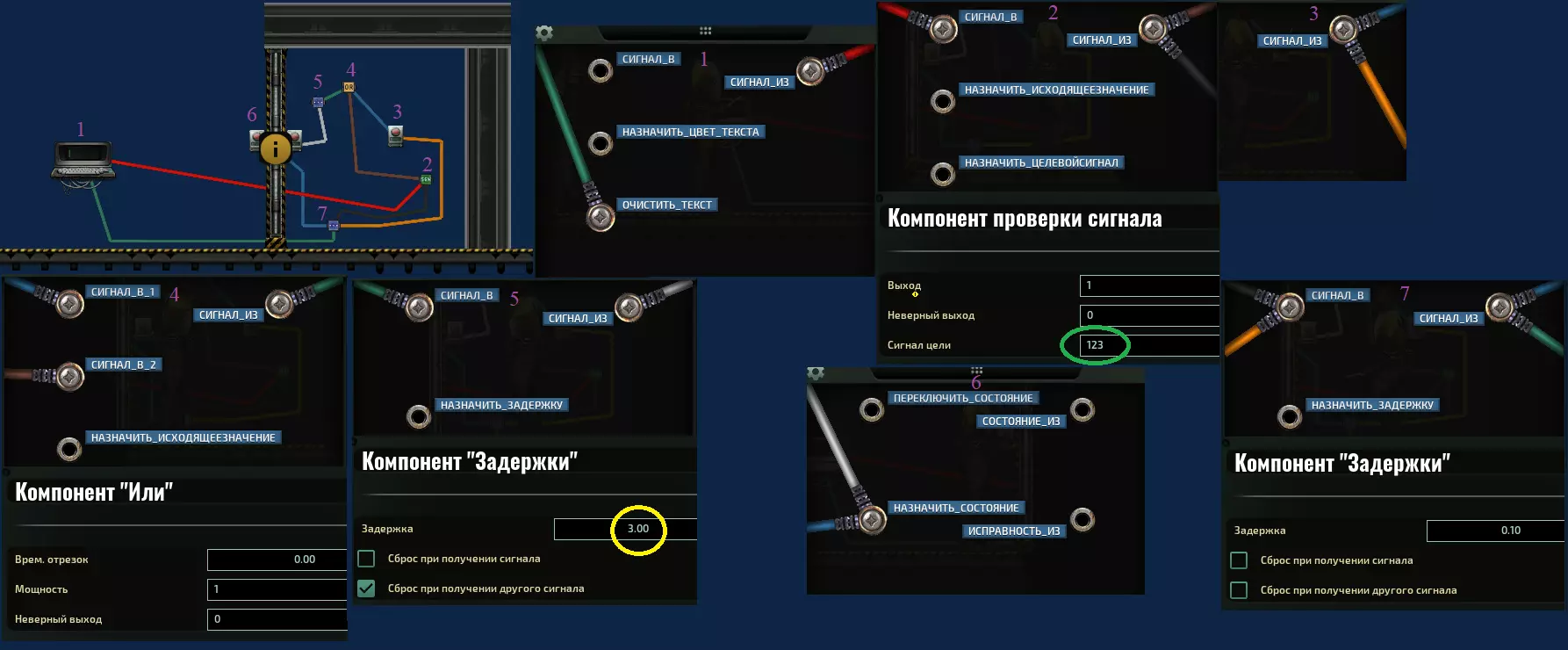
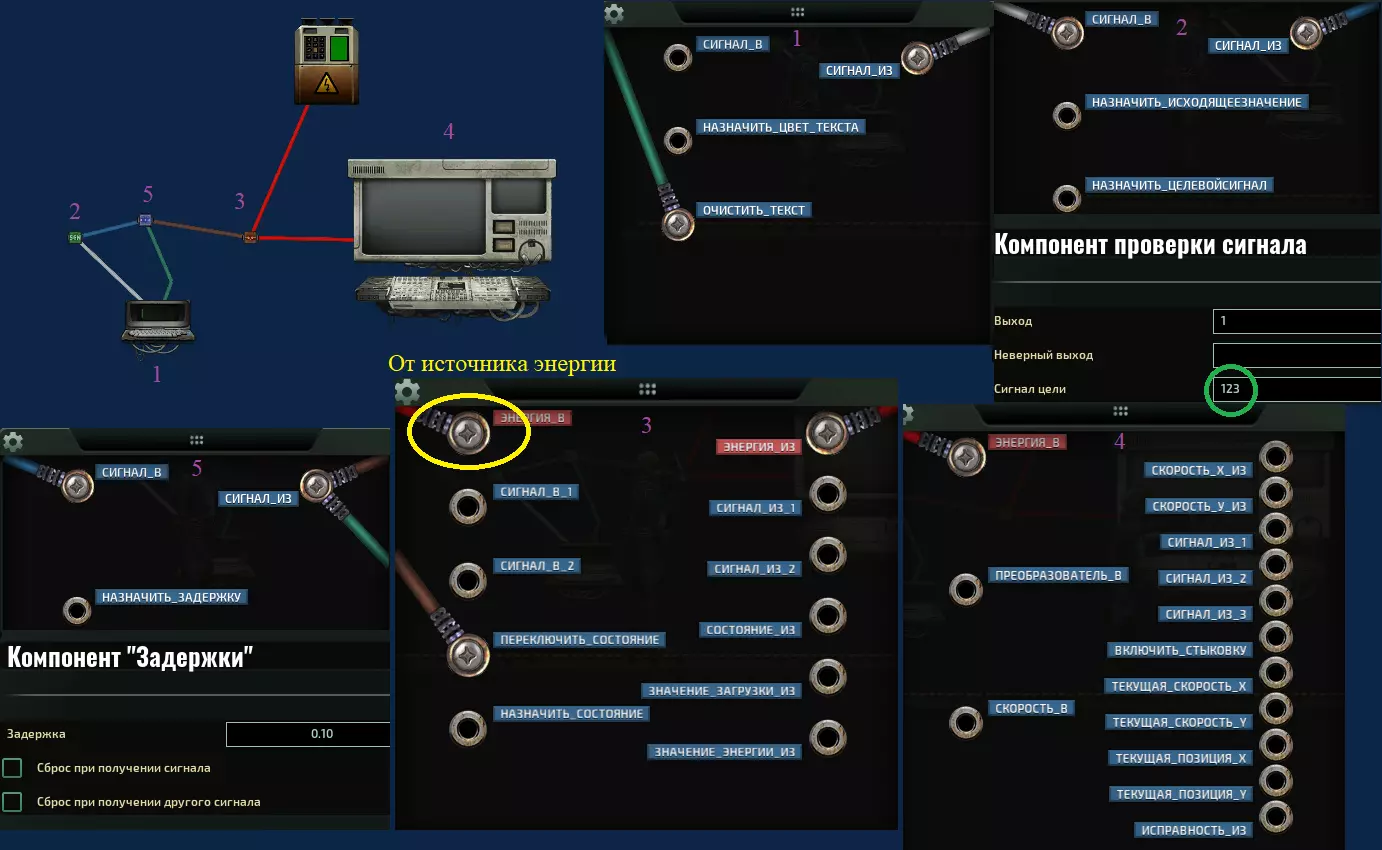
装配说明: - 此方案应使用无内置按钮的门,否则通过拧动门上的电线可能会破解防护系统。反之,如果拆除外部按钮,仅保留终端作为与门进行外部交互的唯一装置,那么即使是所有电线都被切断的关闭状态的门也会保持关闭。终端必须安装在门外,而所有其他防护组件则应安装在被保护的室内,否则系统很容易被绕过。 对于船长终端则更加简单。输入密码时,它会通电并启动;再次输入密码时,它会关闭。信号验证组件上用绿色圆圈标记的位置也需要设置密码。信号检测和射线继电器组件应安装在隐蔽位置或直接安装在面板下方。该系统可以通过从其他电源引接电线轻松绕过,但它能防止因潜入的叛徒导致的航向突然改变。
压载舱 flora 的两种处理方式 发现压载舱内存在 flora 时,需先将舱内积水排空,然后切断水泵的电力供应。之后,可使用任何可用方法(焊接枪、切割器、火焰喷射器、手榴弹)手动清除 flora。拉动拉杆即可排空压载舱并关闭水泵,为手动处理问题提供条件。按下按钮还会排空压载舱并关闭水泵,随后引爆安装在雷管中的燃烧手榴弹(但只有当水泵有足够强度在爆炸时不损坏的情况下才会引爆),接着火焰会彻底烧毁植物,之后水泵恢复供电,流入压载舱的水会将火焰扑灭(前提是此时潜艇没有试图以最大速度上浮)然而,用于灭火的淹没模块在这种情况下可以轻松额外连接。使用后需要更换 detonator 中的点火榴弹。
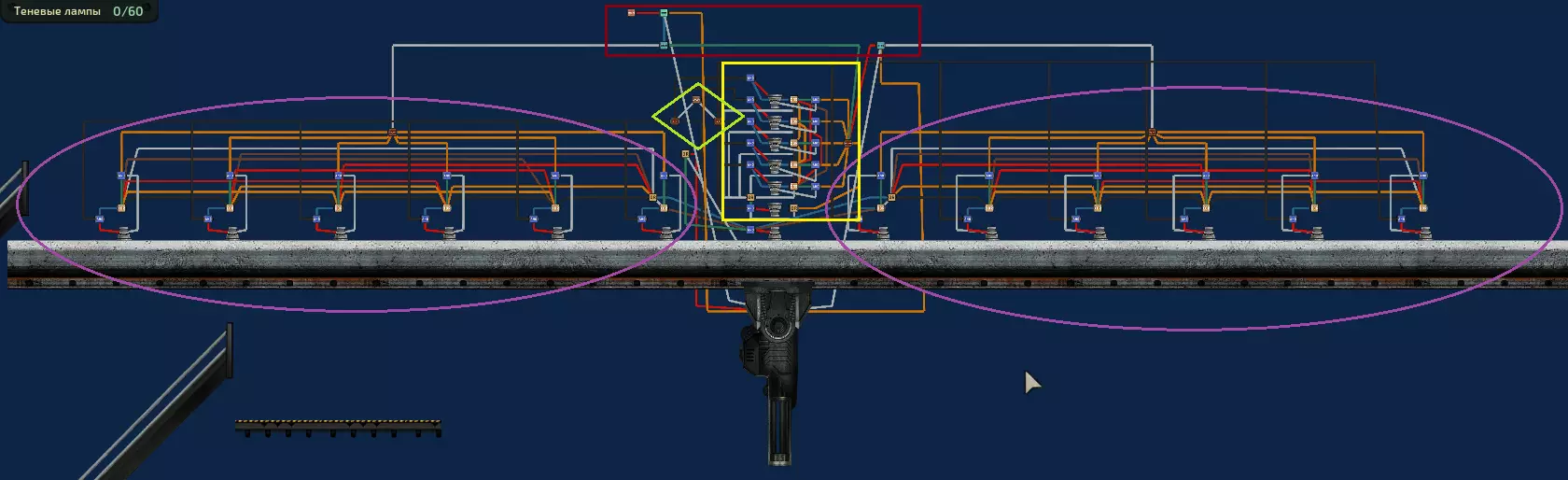
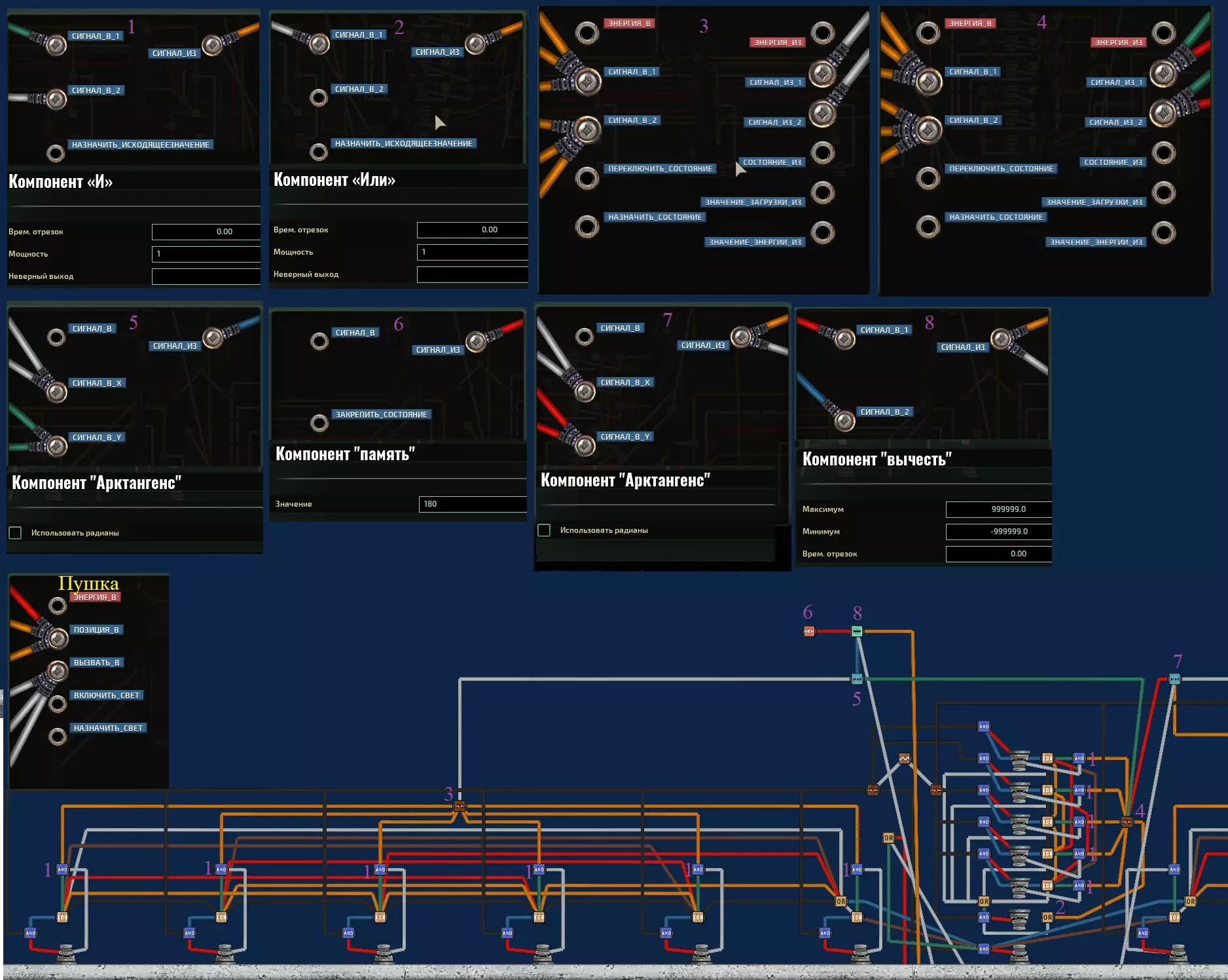
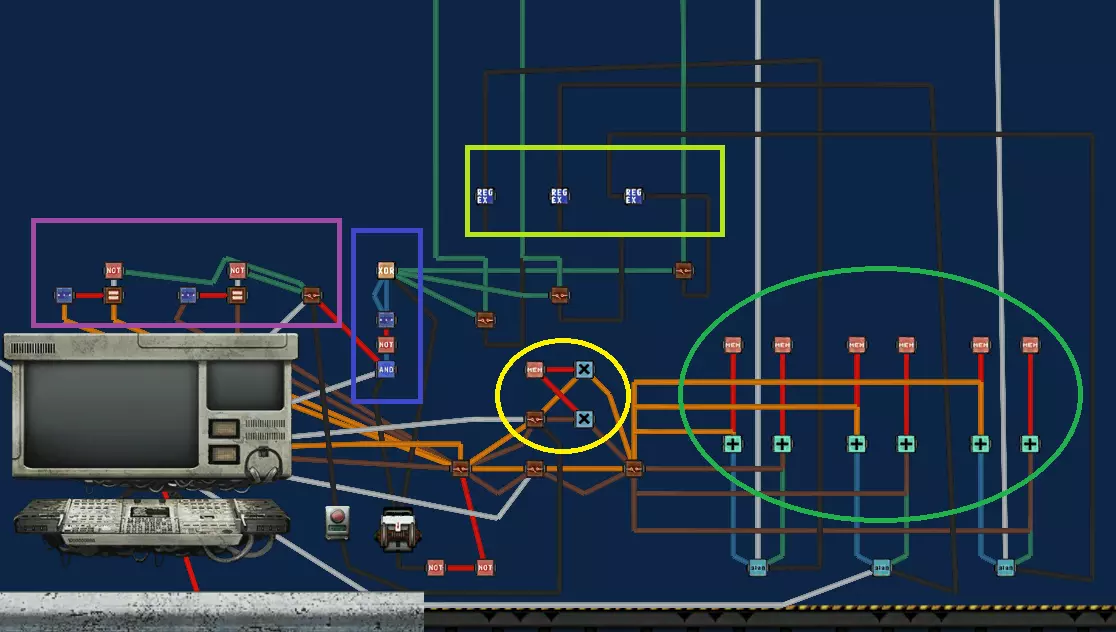
组装说明: - 燃烧时间在部件(14)上设置(标有红圈)。 - 手榴弹不会引爆的最低强度百分比在部件(21)上设置(标有绿圈)。 - 指示灯(25)表示由于泵强度不足,手榴弹不会引爆。 - 该系统可轻松扩展为多个压载泵。两个泵之间只需安装一个引爆手榴弹。手榴弹的燃烧时间和位置可根据你的潜艇单独调节。 创建自动炮塔 如何让安保人员失业? 自动炮塔能够对指定区域内的敌人进行有效射击,不过在这方面还是略逊于人类。将此装置安装在机枪上效果最佳,磁力炮的表现也不错。尚未在激光武器和轨道炮上进行测试,但它们很可能只能对深渊怪物进行有效射击。指南中将提供经过修改和完善的自动炮塔示意图,不过首先,我们将展示安装在伊罗号潜艇下前炮上的首个原型在战斗环境中的运行记录。改装后的版本拥有更出色的技术性能和额外的便捷附加装置。但最重要的参数是针对特定潜艇上的特定火炮进行校准。不过一切都得按部就班来。 基础改装配置下的自动炮塔总体结构如下:
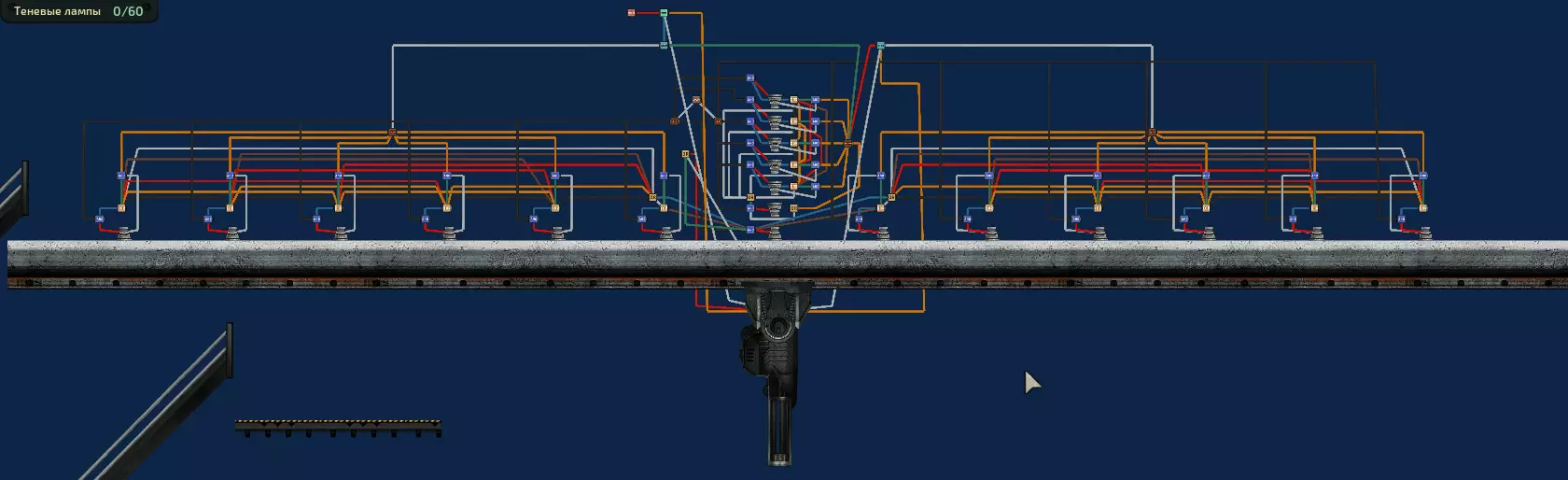
不必担心其复杂程度,即使完全不懂这些线路,也完全可以建造出来。只需严格按照提供的说明操作,注意线路的连接位置和设置的数值即可。 从逻辑上看,它由以下模块组成: - 两个水平坐标模块(用紫色椭圆标记)。 - 一个垂直坐标模块(用黄色矩形标记)。- 计算模块(用棕色矩形标记)。 - 节奏驱动模块(用浅绿色菱形标记)。与之相连的还有坐标模块中所有通过导线与其连接的AND组件。炮塔【能够】在没有此模块的情况下运行,但该模块仍为推荐配置,因为它可以提高系统的可控性。 - 零X坐标残余模块(未标记组件)。理论上,可以与水平坐标模块组合。这可能会在后续的修改过程中实现。
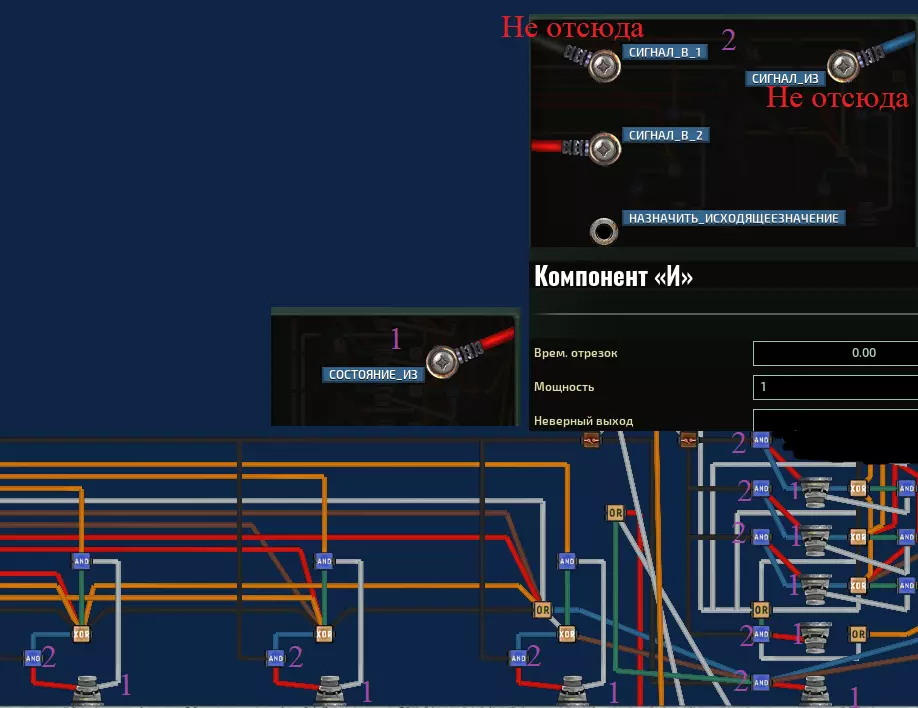
标有“Не отсюда”注释的电线在本步骤的图片中无需触碰。此类标记并非出现在所有有类似电线的图片上,仅在不标记就更容易在计数时混淆的图片上才会标注。 步骤1 安装运动传感器:将中央传感器放置在火炮支架的高度。从中央传感器开始,布置一条垂直线和两条水平线的传感器。注意!传感器的安装方式取决于潜艇的形状。您可能需要压缩其中一条线路,但这不会影响我们——请记住,传感器的探测范围在 calibration(校准)时可以而且需要进行调整,不过这一点我们稍后再谈。此外,随着水平传感器与炮塔距离的增加,可以逐渐加大它们之间的间距。在这个示例中,水平传感器之间的间距为10个单位,而垂直传感器之间的间距为2个单位。在每个运动传感器旁边放置一个【与门】组件。将【与门】组件和传感器连接起来。
步骤2 安装振荡器和两个继电器。从振荡器引出导线连接到每个继电器的每个信号输入端。将继电器的信号输出端与上一步安装的AND组件相连。导线来自哪个继电器以及哪个信号端口并不重要,重要的是每个AND组件的输入端都有一个信号输出端与之连接。振荡器频率(绿色圆圈标记处)是信号通过整个系统的频率。100完全足够,但也可以尝试调整这个数值。
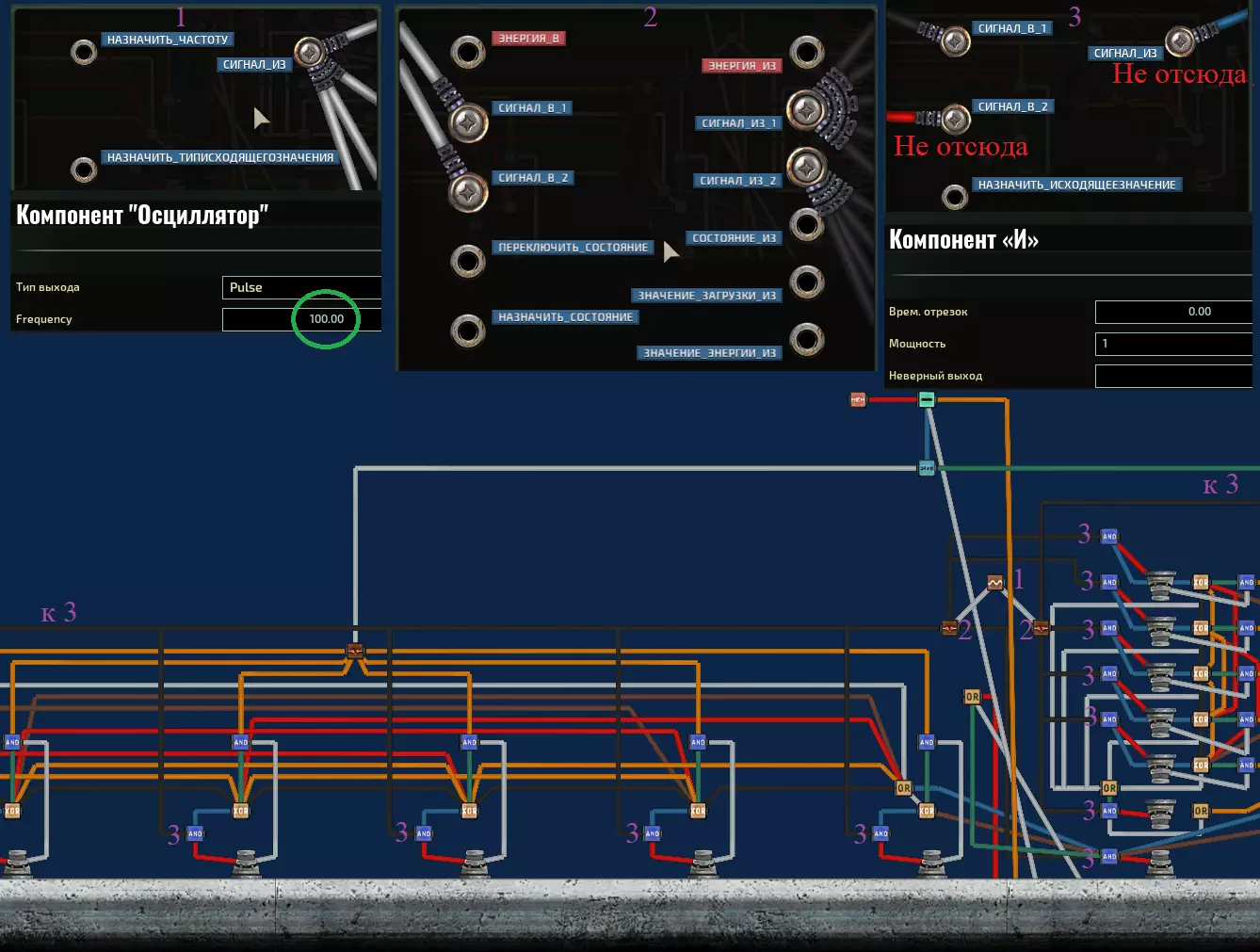
步骤3 注意:此处描述的是6个垂直传感器和13个水平传感器的连接方式。传感器数量的变化会导致用于增加最大可能导线数量的OR门被添加或移除,因为每个端子最多只能插入5根导线。 在除中央水平检测器之外的每个水平检测器以及除第一个垂直检测器之外的每个垂直检测器旁,设置XOR(2)组件。将来自与探测器相邻的与门(AND)的导线连接到它的端子(1)。在第一个垂直探测器旁边,将异或门(XOR)替换为或门(OR)(7),并以同样方式将来自相应与门的导线连接到该或门(6)。在第一个非中央水平探测器的两侧,各额外放置一个或门(OR)组件(3)。将来自相应异或门(XOR)的导线连接到该探测器的其中一个输入端子(2)。在每个检测器(中央检测器和第一个垂直检测器除外)旁边设置【与门】(4)。将对应【异或门】(2)的导线连接到其一个端子,另一个端子连接对应检测器(10)的导线。从连接中央检测器的【与门】(5)引出两根导线至两侧:第一根连接最近水平检测器的【异或门】(2),第二根连接其对应的【或门】(3)。在第一个垂直探测器旁边放置另一个或门(8),并将相应与门(6)的线路连接到该或门。从另一个或门(7)引出线路,连接到每个上级异或门的端子。在中央水平传感器旁边安装另一个或门(9),并将相应与门(5)的线路连接到该或门。在该组件上设置数值为90,并引出两条线路:一条连接到位置端子,另一条连接到呼叫端子。AND(4)组件和OR(8)组件的黄色标记值将在后续校准中进行修改。
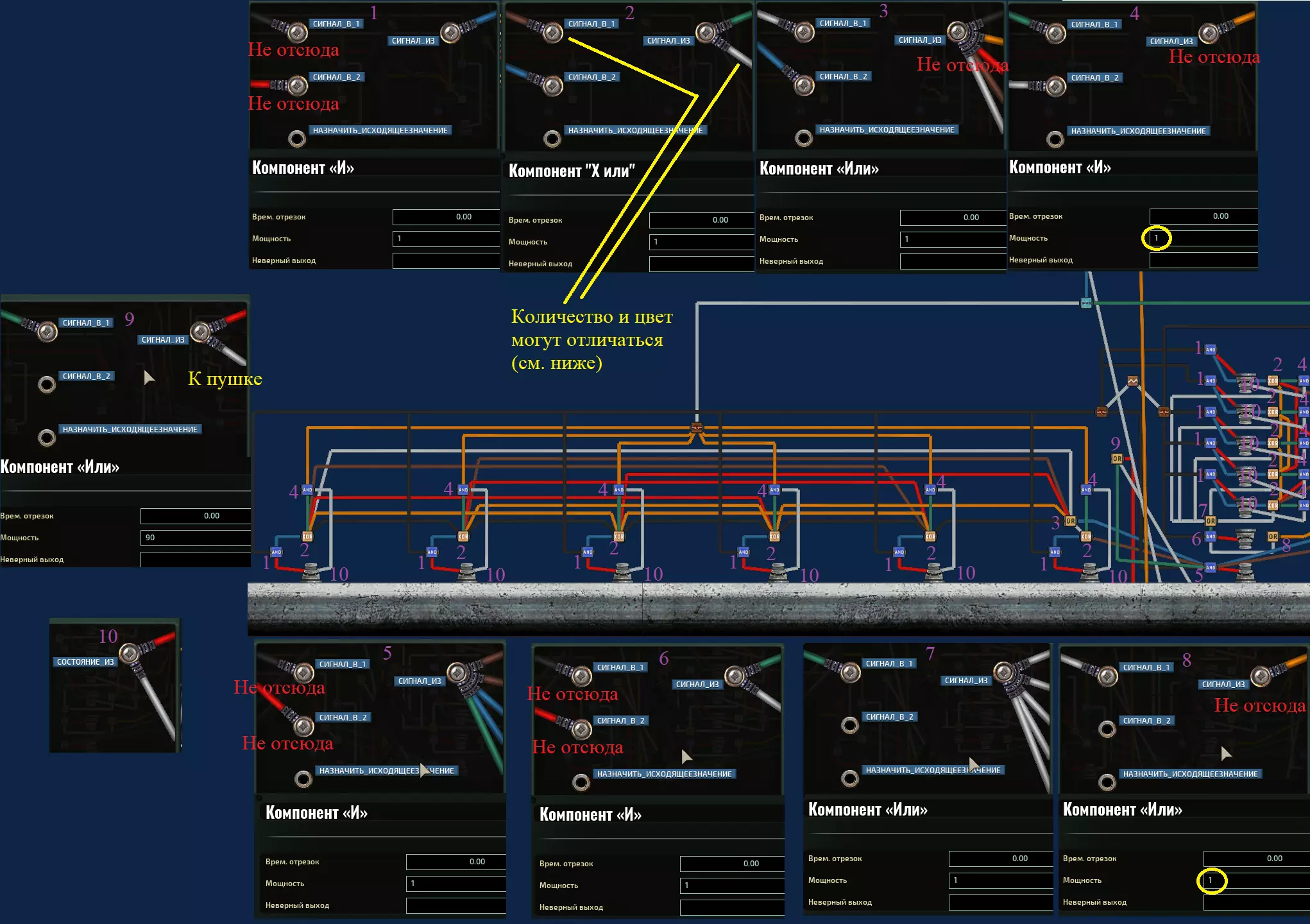
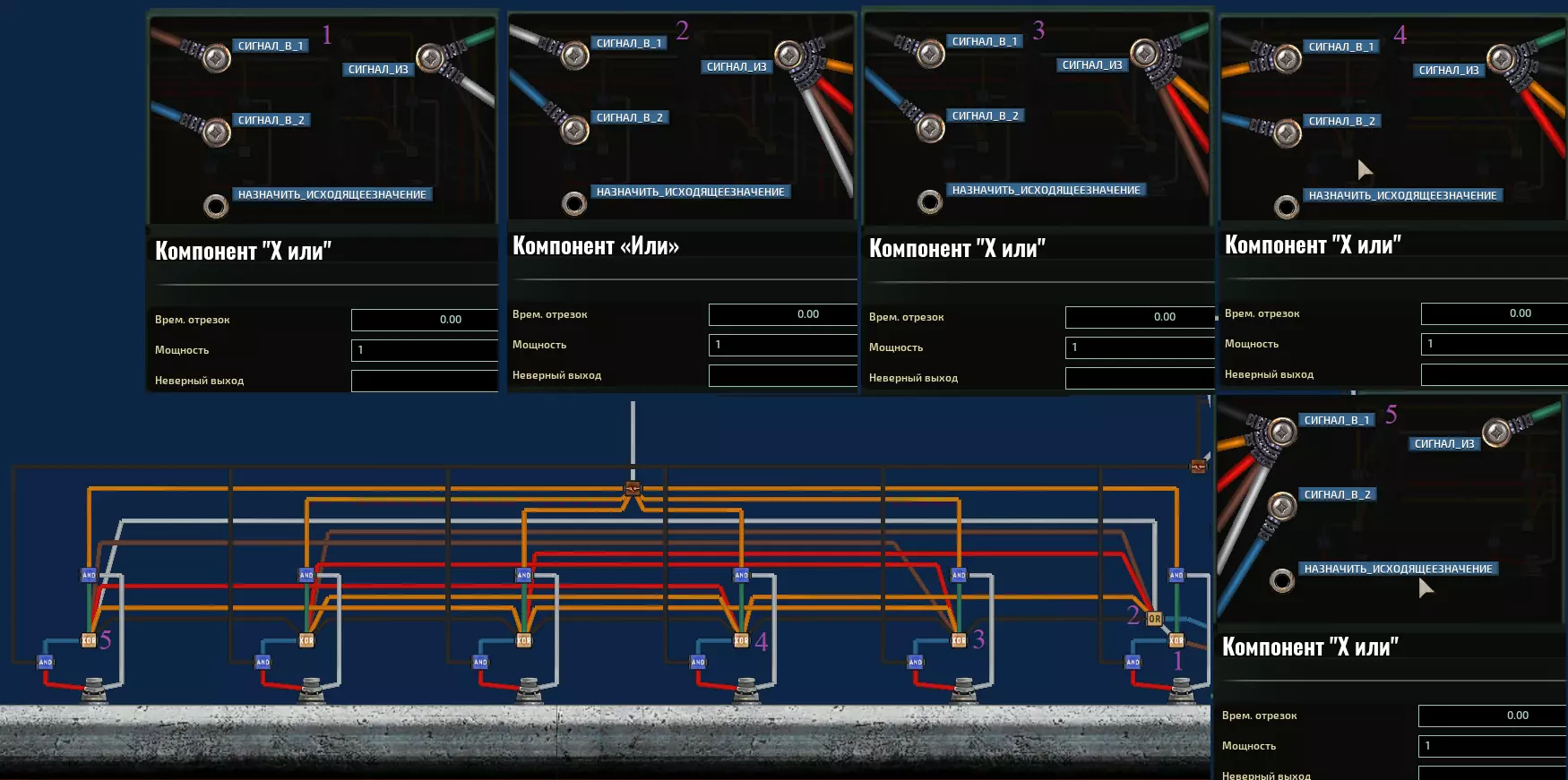
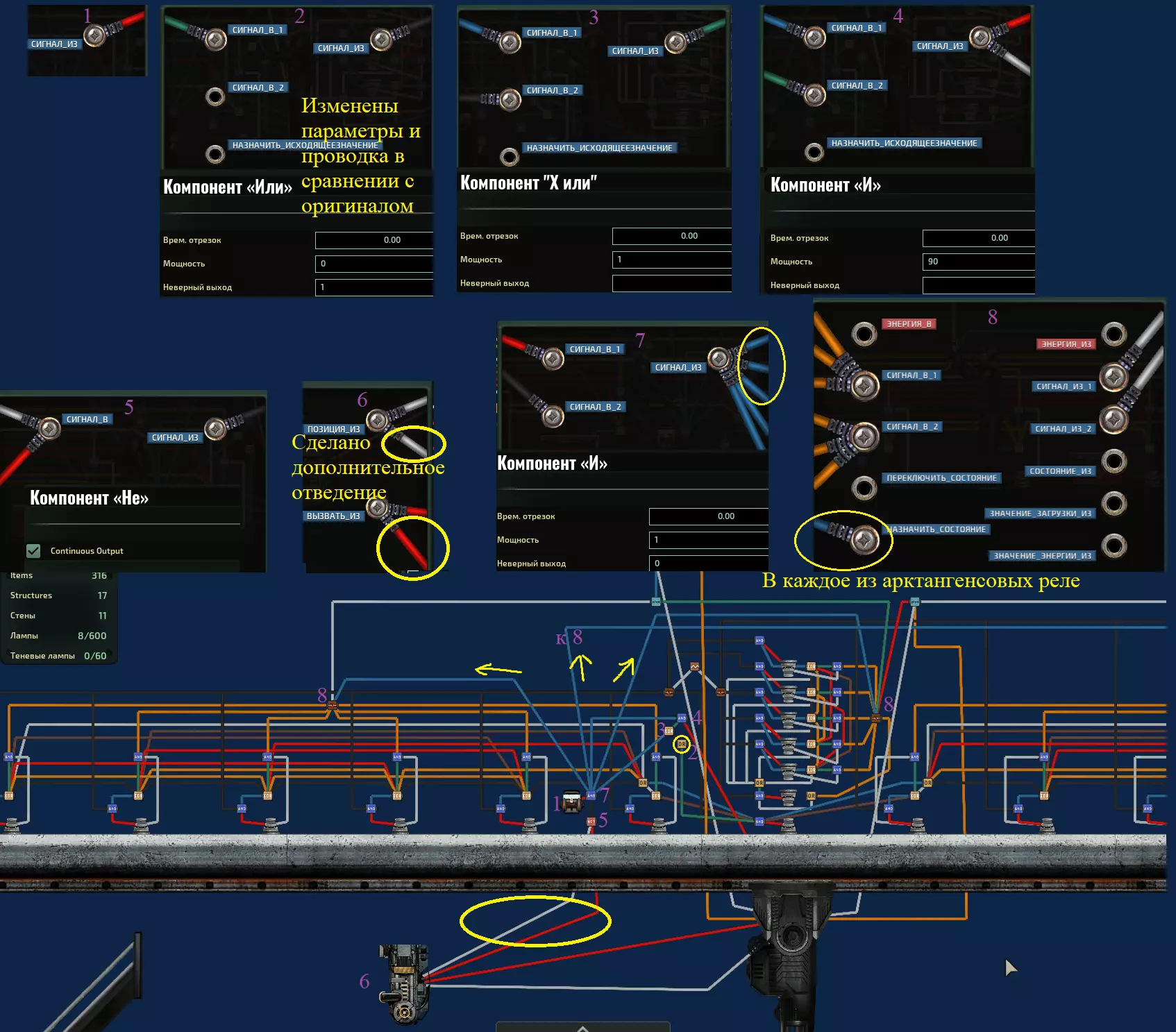
步骤4 现在我们来连接异或门(XOR)。我们的任务是,当激活任何一个离中心更近的探测器时,所有离中心更远的探测器发出的信号都会被中断。也就是说,每个离中心更近的异或门都需要连接导线到每个离中心更远的异或门。可以直接连接,也可以通过或门(OR)进行转接。中间的水平探测器和下方的垂直探测器的情况略有不同。它们在之前的步骤中已经连接好了。示意图显示了水平模块的连接方式。黑色导线连接到相邻的异或门(XOR)。橙色导线隔一个连接。红色导线隔两个连接。棕色导线隔三个连接。白色导线隔四个连接。由于导线数量的限制,离中心最近的探测器通过上一步连接的或门(OR)发送其导线。对于垂直模块,除白色导线外,该配色方案保持不变。白色导线仅用于通过或门(OR)将所有其他部件与下方传感器连接。图中未详细展示所有异或门(XOR)的连接方式,但连接模式清晰,关键是避免混淆。
自动炮塔制作 第二部分 步骤5 现在需要将每个已连接的异或门(XOR)组件与门(AND)(1)连接到其对应侧的继电器(3、4)。继电器的哪个信号端口均可连接。对于垂直坐标模块,还需将下方检测器的或门(OR)组件(2)连接到继电器(4)。然后安装两个反正切组件——分别用于左侧(5)和右侧(7)水平坐标模块。接收到信号【в_Х】时,从对应侧继电器(3)的两个信号输出端引出导线。接收到每个反正切组件的信号【в_Y】时,从垂直坐标模块继电器(4)的两个信号输出端引出导线。后续连接方式取决于火炮在空间中的朝向。在所示情况下,向左侧模块添加减法组件(8)和值为180的内存组件(6)。减法组件的上部端子(8)连接着来自存储组件(6)的导线。下部端子则连接着来自相应反正切组件(5)的导线。减法模块左侧的导线和反正切组件右侧的导线分别连接到火炮的方位和俯仰端子。连接已完成,接下来进行调试。
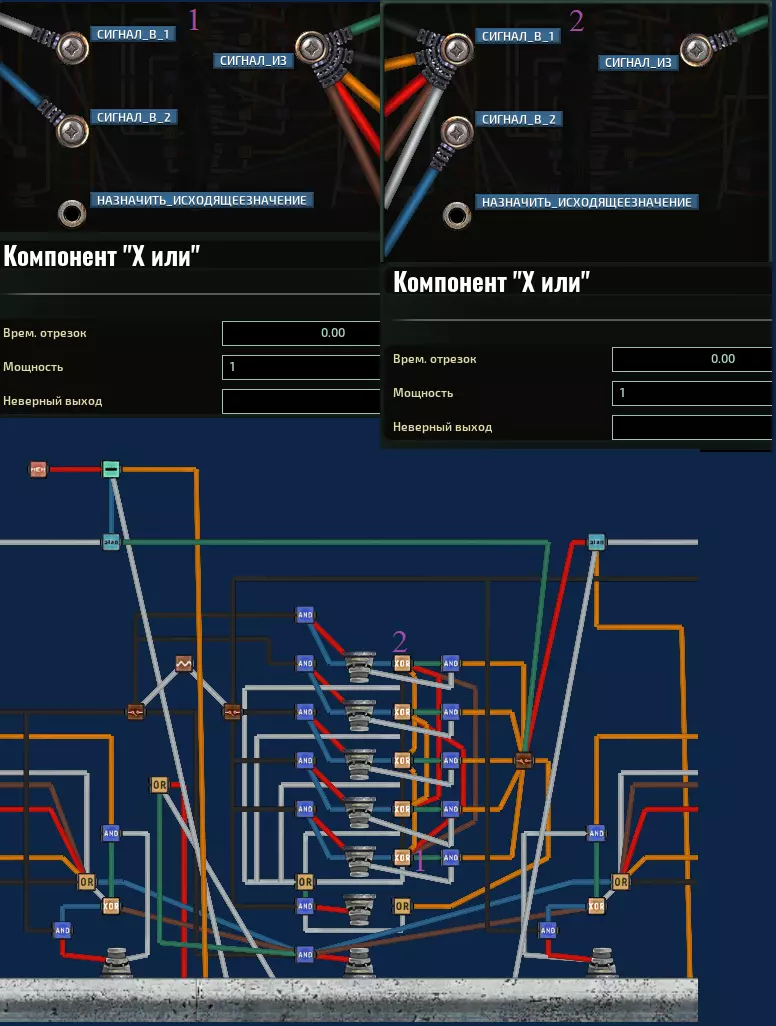
校准 校准是指调整与【与门】和【或门】(位于垂直坐标模块中)以及运动探测器相关的参数(参见步骤3中的黄色标记)。在每种具体情况下,校准都必须独立进行。在这种情况下,建议将【或门】的值直接设为零或非常接近零,以便在敌人靠近船体时,火炮能处于水平位置。可以通过均匀增加数值或向远离中心的方向梯度增加数值来设置与门(AND)的网络值。运动传感器的数值设置方式类似。将所有运动传感器的检测目标设为仅怪物,并勾选忽略尸体选项。注意坐标轴的偏移问题。图中展示了两种关闭系统的方式:强制关闭——通过抬起操纵杆,以及自适应关闭——当有人站在与火炮相连的潜望镜后时。与标准版本相比,中央传感器“或”门的信号现在不会直接发送到火炮,而是先切换到“异或”门和“与”门,然后才发送到火炮。此外,信号本身已从0更改为90,并添加了错误信号1。并且,与杠杆相连,再与三个继电器的【设置状态】节点相连,这些继电器通向反正切函数。来自火炮潜望镜的【位置】和【呼叫】信号已额外连接到已安装的非门组件。其他改动不影响标准线路图,具体如下:非常希望传感器的探测区域不要覆盖到潜艇本身,否则炮塔可能会对处于盲区的敌人,甚至只是宠物进行攻击,从而浪费弹药。下面是经过设置(尽管并非完美)的炮塔工作示例。武器射击功能尚未启用。在示例中,运动传感器的检测区域未进行偏移,正如上文所述,这并不好,需要在真实潜艇环境中进行修正。示例参数:与门:垂直方向 - 从下到上为1至5,水平方向 - 从中心到边缘为1至6。所有水平运动传感器的X轴偏差为100,Y轴偏差为1000。垂直运动传感器的X轴偏差为1000,Y轴偏差从下到上依次为250/350/600/800/950/1000。上部Y轴也有-80的偏移。再次说明,这只是非常粗略的校准,需要根据具体潜艇上的具体武器以及传感器的具体位置进行大量修改和调整,以确保探测区域超出潜艇范围。此处仅作为示例。 安装说明: - 校准时,X轴设置为负值会使探测区域向左偏移,正值则向右偏移。按Y键,负值表示向下,正值表示向上。无法将探测区域从探测器移开,使其完全不接触探测器。不知道这是bug还是有意设计的。因此,如果你将散布设置为100,那么向任意方向的最大偏移量就是100。如果设置为1000,那么偏移量也可以设为1000。当尝试输入更大的值时,它会自动切换为当前散布下的最大允许值。存在一个漏洞可以改变这一情况。如果先将散布值调到最大,然后将偏移量设置为所需数值,接着再把散布值调整到小于该偏移量的数值,那么偏移量就不会发生变化,并且探测器甚至会正常工作!也就是说,如果你向它请求,比如说灯泡,那么靠近它时,灯泡会先亮起,然后熄灭,这样你就能靠近它而不会被点亮。但这只在更换区域前有效,所以不建议在炮塔探测器上使用这个功能,除非你想每次都更改它们的数值。在XOR门封锁阶段,可以通过为每个XOR门添加OR组件来减少导线数量。每个OR组件将接收来自对应XOR门的导线以及前一个OR组件(若存在)的导线,其输出则连接到下一个OR组件(若存在)和下一个XOR门的封锁输出端。不过,这种方法在减少导线数量的同时会增加组件数量。当使用更多的运动传感器时,必须采用这种方法,因为端子上的导线数量将超过最大值。大幅减少导线数量的方法可在下方章节查看。 - 能够关闭自动控制可能会很有用。
即使进行了完美校准,由于第一条评论中描述的问题,仍会有一小部分探测区域覆盖到潜艇。如果怪物进入该区域,或者船上有宠物,炮塔就会开始空射。因此,强烈建议在舱室中央再放置1-2个运动探测器(具体数量取决于主探测器的探测范围长度),将其校准为探测范围恰好覆盖整个舱室,设置为检测怪物并勾选忽略尸体选项,然后将它们直接连接到上文提到的非门组件上。这样,当该区域出现怪物时,炮塔就会关闭。还可以额外安装信号装置。 - 可以建造不会被附近探测器阻挡更远目标的炮塔,这样甚至可以在其中加入运动探测器区域之间的坐标重新计算功能,如果多个探测器同时触发,这将提高精度。但当出现两个或更多目标时,炮塔很可能会直接向目标之间的位置射击。所提供的方案也并非完全没有这一缺点,但出现此类情况的概率显著降低,且需要敌人处于特定位置。如果不直接从北极星组件和减法组件引出线路,而是添加一个异或门(XOR),将北极星组件的信号连接到其两个输入端,仅将减法组件的信号连接到其中一个输入端,再将异或门的输出连接到新增的或门(OR)组件,或门的另一个输入端直接连接北极星组件的另一根线路,最后从或门的输出端引线到炮位,那么就不会出现炮塔无法她明白,需要射击的目标将会变得极为罕见且非常短暂。然而,要完全消除这种可能性,只能通过创建一个运动传感器矩阵,让每个传感器凭借优先级,本质上不是负责一个区域,而是负责一个特定的方块。这也会提高射击精度。不过,我认为这样的系统已经是过度设计了。 创建自动炮塔。简化连接示意图 以下是探测器与继电器的简化连接示意图。不再采用“点对点”的阻塞式连接,每个探测器会在数据流的共享数据包中添加其独特的信息标记,而正则表达式搜索组件则会分析该数据流,并对特定数据包做出信号响应。同时,流信号中的每个数据包都是唯一的,且只能激活一个检查组件。例如,在所示的示意图中,组件4就是如此。组件4仅响应1000信号,该信号对应仅激活最后一个探测器的情况。而组件4.1则会响应任何以1结尾的信号,即第一个探测器被激活时。
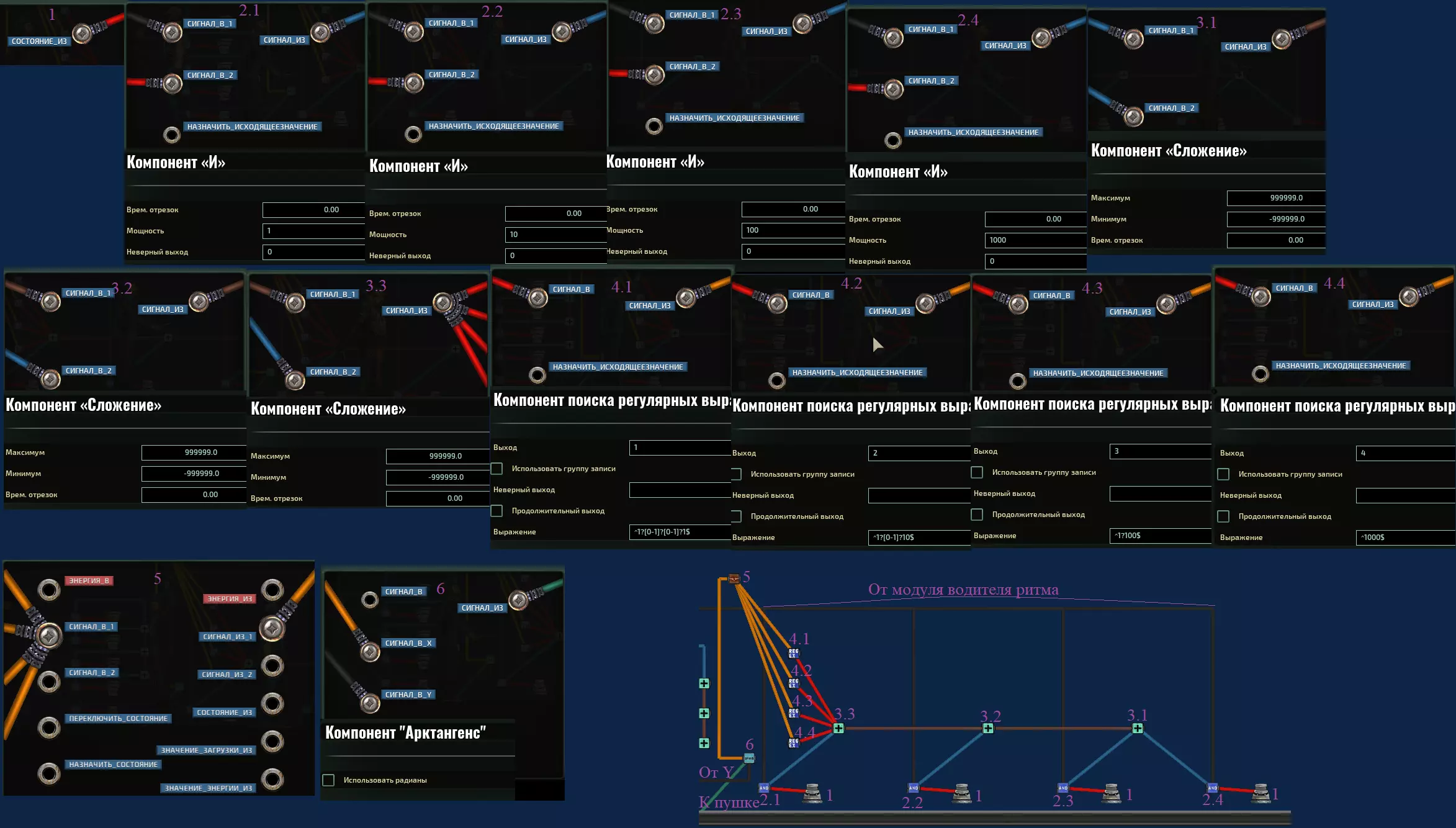
组装说明: - 校准基于信号检测组件的输出值进行。示例中的校准值仅用于系统功能测试,不应直接应用于最终方案。关于整体系统构建、校准及可能的修改,详见上文指南的两部分内容。- 例如,可以在【regexone.com】学习编写表达式,以便信号检查组件正确处理数据包。 - 可以让炮塔理解目标的移动方向并设置提前角,但要正常工作,需要足够密集的运动探测器,最好是一整个探测器矩阵。然而,就像矩阵系统本身一样,我认为这并没有太大意义,因为效率的小幅提升和消除小漏洞并不值得花费精力、时间和组件来开发和安装这样的系统。 武器切换 该方案最初版本的作者是用户Max在我偶然发现这个方案之前,我曾尝试用“更多”组件来创建方案,但这个方案要紧凑和方便得多。当将火炮旋转到特定角度(建议设置在射击线附近的几个角度)时,选定的武器会切换为相邻的武器。这样一来,就无需离开潜望镜去操作旁边的设备,并且可以通过一个潜望镜控制所有火炮(这对于配备多门武器或设有独立舰长潜望镜的潜艇非常实用,例如【The Iroh】)。在Max提供的方案中存在一个问题:当切换相距较远的火炮时,在屏幕切换过程中,光标可能会误触切换线路。切换到另一门炮时,会直接跳转到下一门(或上一门)炮,这使得难以选择到所需的特定火炮。我对线路图稍作修改,解决了这个问题。以下是修改后的线路图。 每门火炮都需要安装一个标准模块。该线路图描述了单个模块的构造及其与相邻模块的连接方式。将潜望镜位置和呼叫端子(2)的电线引至继电器的第一和第二信号端子(3)。位置和呼叫的电线可从信号输出端子直接连接到火炮(10)。还需将位置电线连接到每个正则表达式搜索组件(6)的输出端、延迟组件(4)以及下方的AND组件(5)。从延迟组件(4)引出电线连接到下方AND组件(5)的另一个端子。从它引出导线连接到每个侧面的AND组件(7)。将每侧的正则表达式搜索组件(6)引出导线连接到对应侧AND组件(7)的空闲端子。从每侧的AND组件(7)引出导线,连接到继电器(3)的“切换状态”端子,以及与该侧相邻的另一门炮模块的同名继电器端子(8)。不要忘记,与我们正在讨论的模块类似,最终必须从侧面组件和与其相邻的模块引出电线(9)。还需要添加一个小技巧:我们需要确保始终只有一个继电器处于开启状态,其余的则关闭。因此,安装按钮(1)并从该按钮引出电线连接到除一个之外的所有继电器(8)。那门炮,如果其继电器没有连接按钮的线路,那么在进入潜望镜时会首先开启。完成安装需要按一次按钮。之后可以完全取下按钮(但不确定设置是否会在回合之间保留,所以最好的解决办法可能是将按钮换成杠杆并将其按下)。
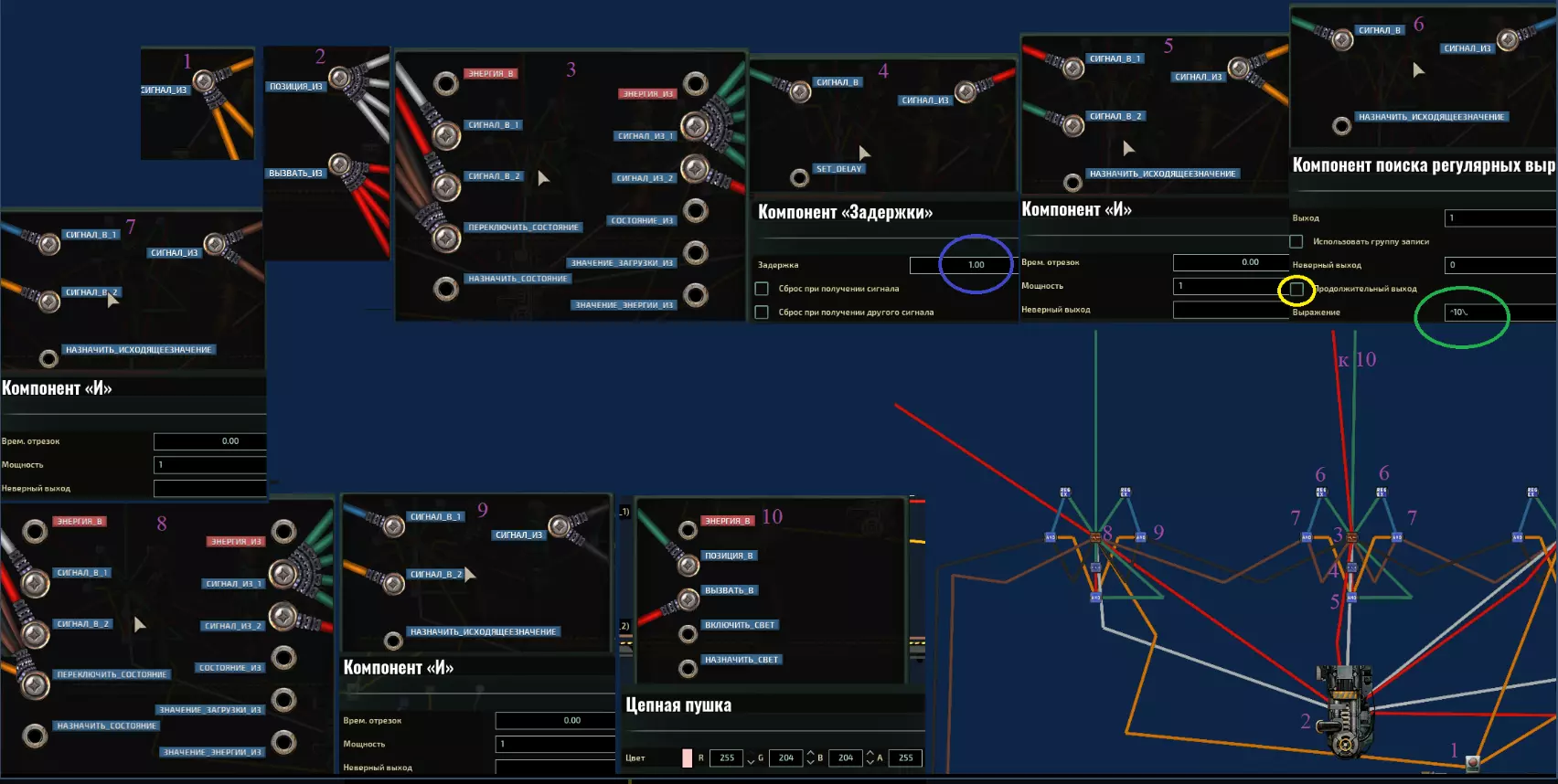
系统设置通过为正则表达式组件设置正确的角度来完成(该位置用绿色椭圆标记)。

将它们的角度设置为比对应火炮的极限旋转角度稍大一侧和稍小一侧。记住,在潜渊症中角度是按顺时针方向增加的。需要正确设置所需角度 - 记录格式为“^X .”,其中X是相应的角度。例如“^185 .”或“^10 .”。理论上,为了方便,可以设置例如大于某个值的角度范围,或其他表达式。为此,最好了解该组件的工作原理。例如,可以在这里学习: 组装说明: - 更改延迟值(蓝色圆圈标记处)可以增加或减少切换火炮后不进行新切换的时间间隔。通常情况下,请务必检查图片上的参数是否与您的组件参数相符(我在此处列出这些参数并非没有原因),但在这个示例中,需要特别注意的是,正则表达式搜索组件上的【持续输出】复选框必须取消勾选(该位置已用黄色圆圈标记)。该方案更适用于独立的船长潜望镜,因为如果将其安装在特定火炮的潜望镜上,当你从该潜望镜切换到另一门火炮后,下次再进入该潜望镜时,你会被传送到之前退出时的那门火炮,而非原本安装该潜望镜的火炮。因此,如果要将该方案安装在特定武器上,需要进行调整或小心操作。同时可以尝试移除按钮。“幸运阿滕伯勒”连发系统

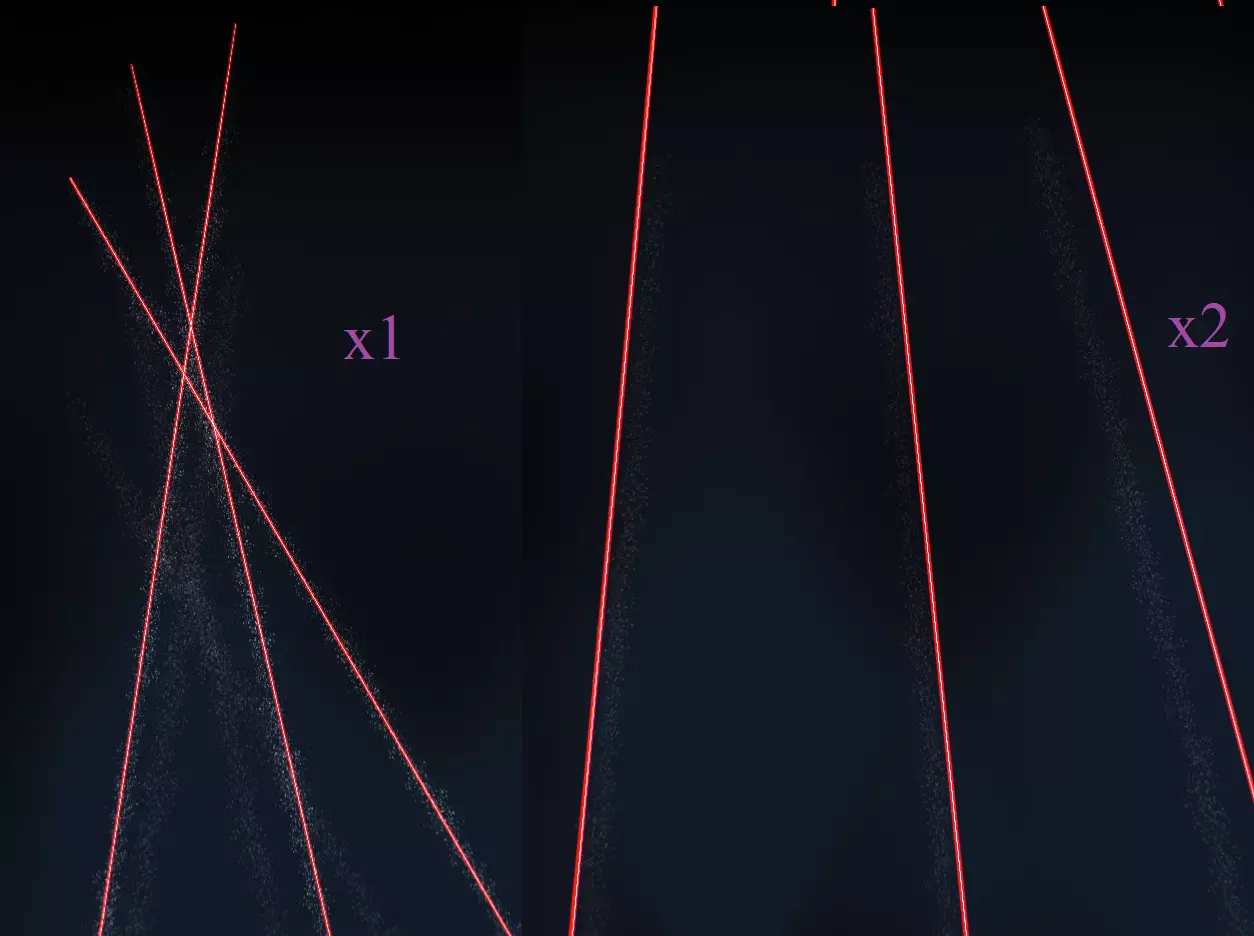
剧透!在与最终 Boss 的战斗中自动武器系统的实际应用 展示装置的工作原理。为了进行演示,使用的不是手动控制,而是基于 X 坐标的电压三角形,并乘以内存组件中的数值。在实战中,人员可以精确地将武器瞄准位于更远距离的目标。 这是矮人工程智慧的巅峰之作。配备此系统的舰船能够从船长终端直接操控所有可用武器,对远超潜望镜探测距离的目标进行精准射击。瞄准通过在船长终端的声呐屏幕上移动向量来实现。向量的末端是所有武器火力的汇聚点,即瞄准焦点。按下船长终端上的按钮可大幅增加焦距。这能显著提升瞄准射击的射程,但会略微降低射击精度和密集度。射击通过终端上的按钮进行。按下另一个按钮后,自卫武器可以切换到持续射击模式,在此模式下,当声呐屏幕上的瞄准向量移动时会自动进行射击。当目标位于武器的射击扇区之外时,无法对目标进行射击的武器将不会开火。建议与激光炮配合使用,以消灭深渊怪物和大型目标,或击退小型目标集群。通过拉杆激活系统。理想情况是船上有两个船长终端(例如在【The Iroh】上),这样可以直接连接系统。否则,就必须在操纵杆上额外设置从该终端禁用船舶控制的功能。这样一来,要么只能趴在地上战斗,要么就得设置船舶姿态自动保持系统,甚至在不使用终端的情况下控制其航行。
线路的主要部分从船长终端获取方向向量,将其坐标转换为角度并传输给武器。此外,线路中还包含: - 弹道修正模块,该模块根据武器在船体上的位置来校正武器瞄准。需要手动设置修正值(见下文)。用绿色椭圆标记。

瞄准镜模块,激活后可增加瞄准射击的距离。但声呐屏幕上的向量长度不会增加,因此需要在脑海中补全瞄准线和实际向量的末端,这会对精准度和密集度产生轻微影响。用黄色圆圈标记。
射击模块,可实现按下一次射击按钮发射激光连射。将组件10的延迟时间增加(见下方示意图,橙色圆圈标记处),能够提升单次按下按钮后的射击次数。蓝色矩形标记处。- 【安全锁模块】:当目标不在武器射击扇区内时,防止武器开火。以绿色矩形标记。 - 【持续射击/就绪射击模块】:可激活一种模式,在此模式下,当声呐屏幕上的瞄准向量移动时,武器将持续开火;当瞄准向量静止时,射击停止。以紫色矩形标记。
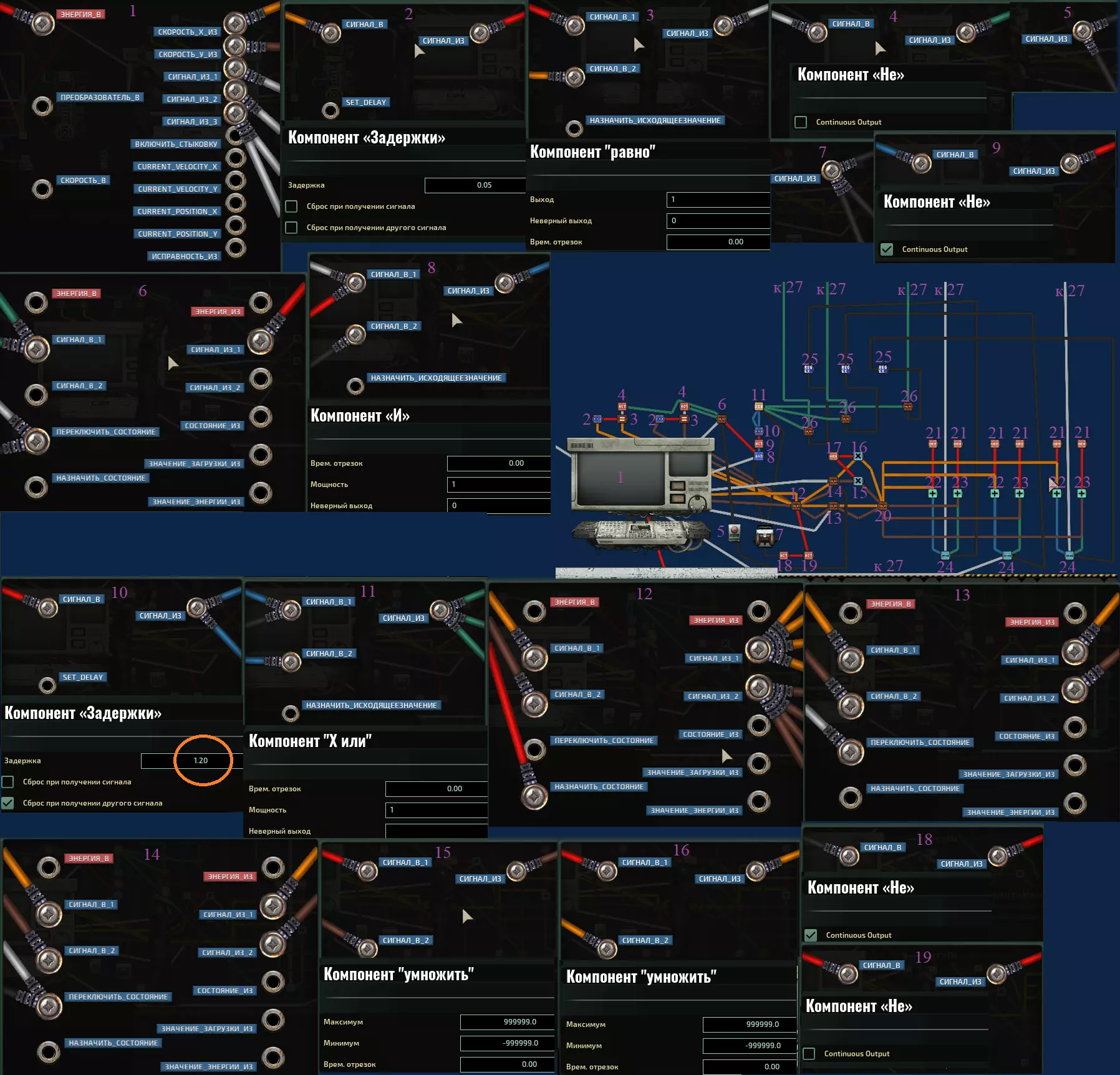
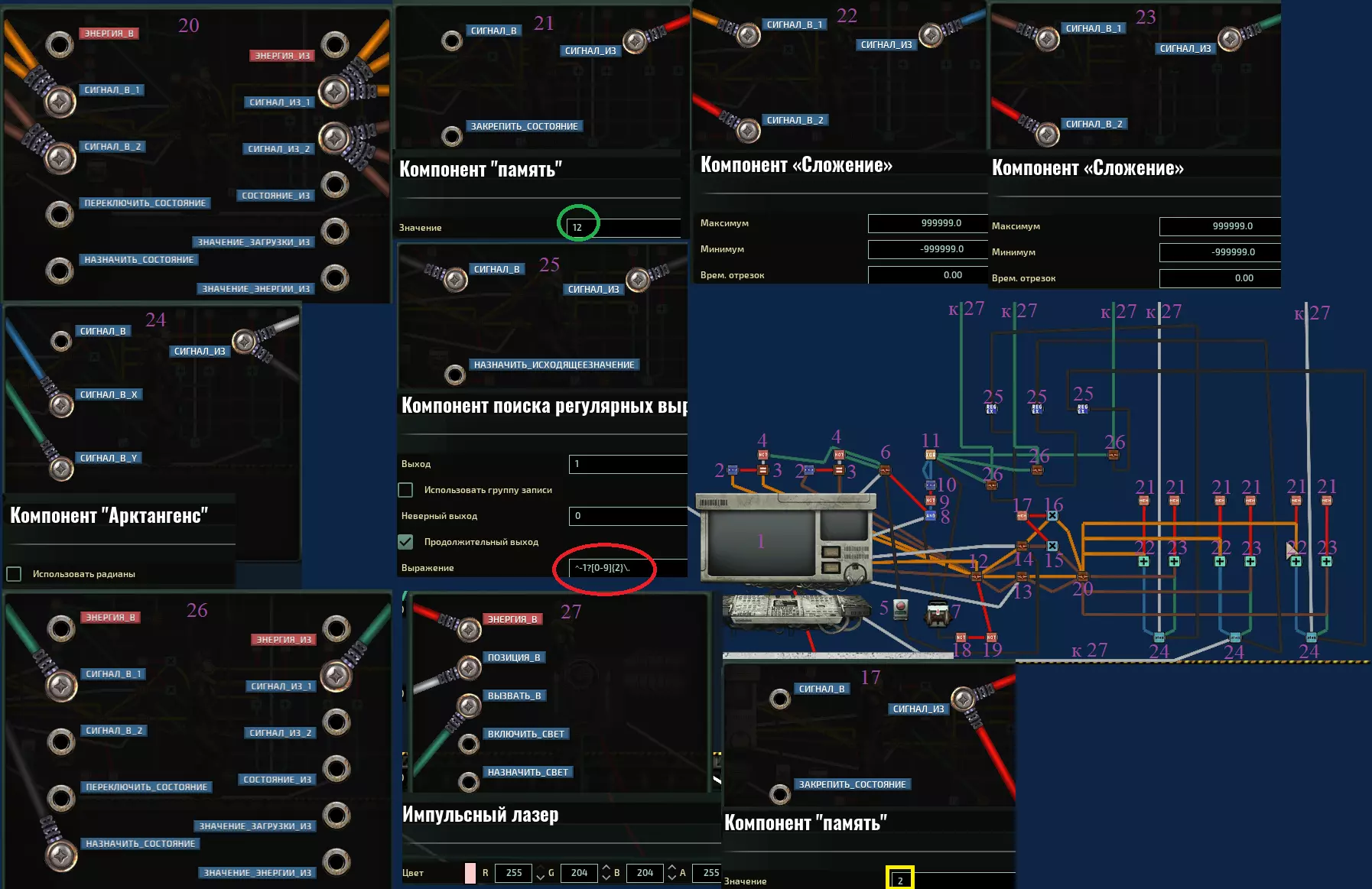
线路图组装 橙色导线传输X坐标信息,棕色导线传输Y坐标信息。从终端的X和Y位置(1)引出导线,连接至继电器的信号输入端(12)。从第一个信号输出端引出X导线,连接至延迟组件(2)和比较组件(3)。同样,从第二个信号输出端引出Y导线,连接至另一组延迟组件和比较组件。从延迟组件(2)引出导线,连接至比较组件(3)。从【等于】组件(3)引出导线连接到【非门】组件(4)。从每个【非门】组件(4)各引出一根导线连接到继电器(6)的信号输入1。将继电器(6)的状态开关连接到终端(1)的第一个信号输出端和按钮(5)。从继电器(6)的第一个信号输出端引出导线连接到【与门】组件(8)。将终端(1)的第二个信号输出端连接到【与门】组件(8)的同一个端子,另一个输入端连接到杠杆(7)。关于如何为正则表达式搜索组件编写公式的详细信息,请参考相关教程。 在组件21上,绿色标记的是火炮的修正坐标值(X或Y方向)。为了系统正常工作,每门火炮的每个坐标都需要手动计算该值。关于修正值的计算方法,可以在接下来的章节中查看。 校准火控系统将与门组件(8)的输出连接到非门组件(9),再将非门组件(9)的输出连接到延迟组件(10)。从延迟组件(10)引出导线连接到异或门组件(11)的每个端子。另外,从杠杆(7)引出导线连接到异或门组件(11)的其中一个端子。将杠杆(7)与非门组件(18)连接,非门组件(18)再与另一个非门组件(19)连接。从非门组件(19)引出导线连接到继电器(12)的状态目标端子。将继电器(12)的X和Y导线分别连接到继电器(13)和(14)的对应输入端。我们还将来自终端(1)信号输出3的导线连接到它们的状态切换端子上。我们还将来自按钮(5)的导线引至继电器(14)的同一端子。将继电器(14)的X信号输出连接到乘法组件(16),Y信号输出连接到(15)。将来自存储器组件(17)的导线引至乘法组件的空闲端子。将继电器(13)的坐标输出与继电器(20)的相应输入相连。我们还将带有X信息的乘法组件导线连接到X输入端(16),将带有Y信息的导线连接到Y输入端(15)。然后,我们为1号武器分别连接1根X导线和1根Y导线到加法组件(X对应22)和(Y对应23)。此方案使用了三个武器。将个人记忆组件(用于根据火炮位置校正火力)的导线连接到每个加法组件的空闲端子(21)。将每对加法组件与反正切组件的相应输入端相连。从每个反正切组件引出两根导线:一根连接到相应火炮的位置端子(27),另一根连接到相应的正则表达式搜索组件(25)。从它连接到继电器状态的目标端子(26)。从XOR组件(11)通过导线连接到每个继电器(26)的其中一个信号输入端,而从它们的信号输出端连接到相应武器的触发端子(27)。务必检查所有组件上设置的值是否正确,但以下圈出的部分除外——关于它们的说明如下:如前所述,在组件10上,可以增加时间并调整它,以便按下一次按钮能发射不止一发子弹(位置已标记)(橙色圆圈)。 在组件17上,黄色方块标记的是瞄准镜头的倍率——这是声呐屏幕上虚拟向量被拉长的倍数。例如,如果设置为2,那么武器向量长度的一半会被视为已达到最大长度,而设置的最大长度则会被视为两倍长。在组件25上,红色椭圆形标记了武器将进行射击的区域。当向量超出允许角度范围时,武器将停止射击(例如,当你将潜艇另一侧的所有武器都连接到火控系统,并试图从这些武器向敌人开火时,这样可以防止火炮因撞到潜艇墙壁而无法射击)。
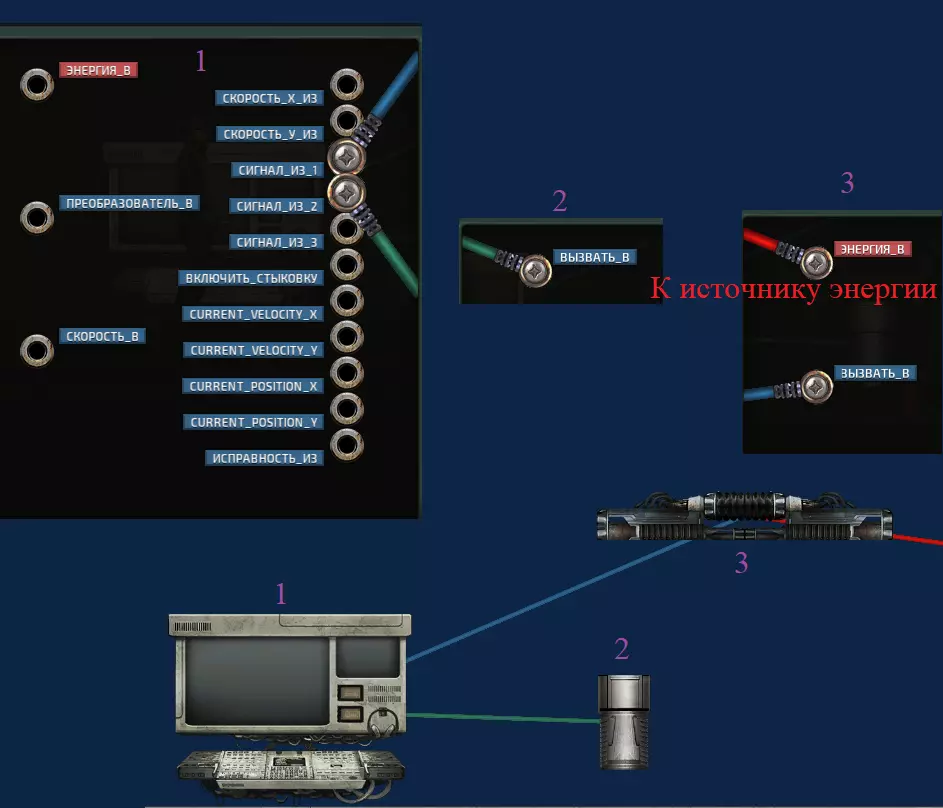
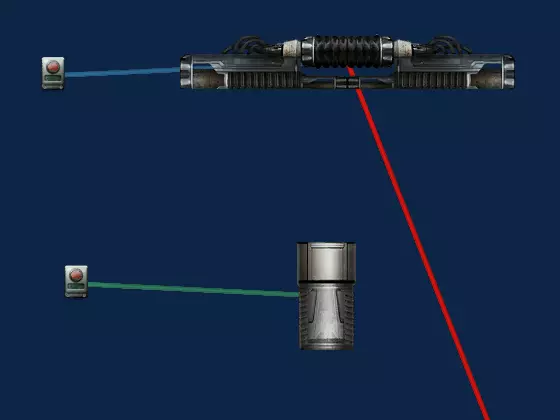
我们的装置究竟是如何运作的?其原理其实就是简单的向量叠加。已知从坐标原点到怪物的向量,以及从坐标原点到炮塔的向量,我们就能求出从炮塔到怪物的向量,从而瞄准并射击。 坐标原点到瞄准点的向量坐标由终端通过其X和Y输出端提供。而炮塔的坐标现在则需要我们自行计算。首先需要说明的是,坐标中心是终端上的一个抽象点,我们的控制向量就是从这个点延伸出来的。若要找到炮相对于该点的坐标,请按照以下说明操作: 1. 连接两个屏幕到终端。一个连接到X输出,另一个连接到Y输出。

2) 让另一个人拿起声呐信标,将其紧贴炮座底部(尽可能靠近),然后开启。 3) 打开船长终端。声呐信标在终端上显示为红色方块。 4) 将声呐缩放到最小倍率,然后在声呐界面上,将控制向量末端的方块与声呐的红色方块对齐。在此缩放比例下,坐标轴上的5个单位值约等于1米。不过我们不需要这个知识。 5) 从显示器上读取X和Y值。这就是修正坐标。将它们输入到该火炮相应的内存模块中,并【反转数值】(毕竟我们是在减去向量)。


为完成安装,请按一次外部按钮以确保系统正常运行。这将反转继电器。之后,按钮可以完全移除(如果反转状态在任务之间保持不变)。系统的开关通过改变杠杆位置来实现。 安装说明: - 注意!关于声呐【MINIMAL】增幅的说明很重要。建议在最小放大倍数下进行设备的校准和操作。原因是声呐屏幕上的向量长度是绝对的。这一点可以通过设置向量并改变声呐的缩放比例来验证。因此,如果校准和操作时声呐的放大倍数不同,系统将无法正常工作。可以为不同的距离设置多个校准值,并通过按钮在这些校准值之间切换,同时改变声呐的探测距离。这样能够更精准地击中较小尺寸的目标。但此类改装会使线路更复杂,且需要更多的校准时间。- 如果需要,可以添加一个小型模块,当有人站在炮塔的潜望镜前时,该模块会将炮塔移出系统控制范围,就像我们在创建指南中所做的那样。 - 电工的技能和弹药箱可以提高武器的射速。而且这似乎对所有连接到终端的武器都有效,前提是你通过终端进行射击。- 如果你在闪电方面有困扰,但又想要三激光,并且你是个经验丰富的电工——那么每次任务结束后制作一个闪电棒。借助技能你会额外获得两个。现在把它们拆解掉。每回合+2闪电,这还不错。 - 在下一部分内容发布前,我会分享一个更具粉丝向的连发系统开发方案。两个潜望镜由两个操纵杆控制。火炮(示例中只有一门,但通过简单校准可以添加新的)会向探照灯光束的交点射击,前提是两名射手都按住了射击按钮。关于该系统的工作原理以及如何校准的说明,可在使用说明和附带的图片中找到。这个想法是由NekooTrap提出的。 现在这是机械装置 注意!这是搞笑板块。只有小丑电工才继续往下读。 奥格拉夫是怎么说的来着?

当失业的安全官(SBшник)遇到船长正用控制台操控所有武器开火时该怎么办?答案是——操控船只。下面提供的只是一个原理示意图,仅用于说明核心操作思路。按下操纵杆即可激活手动(没错,你懂的,手动操作,嘿嘿)潜艇控制模式。 当角色站立或举起双手时,水泵会开始排水,潜艇随之开始上浮。当角色坐下时,水泵会抽水,船只随之下降。处于前部传感器区域会给引擎提供正向动力,处于后部区域则提供反向动力。因此,船只确实可以通过角色的身体来操控!
组装建议: - 建议安装一个指示灯,用于显示水泵是否正在排水。甚至可以进一步安装一个类似速度显示屏的水位记录屏幕。可以让水泵维持特定的水位,而不仅仅是抽水或排水。总的来说,需要为它们引入正常的自动控制系统。- 可以将多个运动探测器排成一排,这样在它们之间移动时,就能为各个方向设置合适的发动机功率。但建议不要设置过大的行程,以免发生碰撞。 - 若想大致了解周围环境,可以使用手持声呐,不过其探测范围非常有限。在中控台整理线路时,我发现了浅色电线、黄色电线和漂亮的紫色电线。但在物品栏中,它们都堆叠在一起,并且显示为同一种标准颜色。只有在安装时才能看到它们的真实颜色。 另外还有一点需要注意。请注意你安装的组件。当组件被拆下后重新安装时,它们会【保留】在拆卸前设置的参数。例如,在物品栏的同一个堆叠中的所有运动传感器,理论上可能具有完全不同的检测区域设置。如果您在电路中安装了之前调整过的组件但未更改其参数,而这些参数被设置为非默认值(例如,AND门的错误输出端显示为0而非空值),这可能就是电路工作出现问题的原因。在部分潜艇上,例如【Iroh】号,设有两个船长控制台。这种情况较为罕见,因此未将其单独列出,但必要时可以直接从武器舱设置备用控制区。无需构建复杂系统,只需将X控制台连接至引擎,Y控制台连接至水泵即可。潜艇的操控会变得稍差(至少是因为水泵会根据移动方向不断尝试排空所有水或完全注满压载水),但这已经足够了。最好再设置一些按钮或断路器,当使用一个终端时,另一个终端会被禁用,以避免指令冲突。 - 借此机会,我要向【The Iroh】潜艇的创作者们表达我的钦佩之情。你用电池、灯泡、排水阀和垃圾桶制造的“磁场”简直是工程学的奇迹。希望你能从这份指南中有所收获。——你觉得我明白你说的话了吗?——嘿嘿,不重要,重要的是它能正常运作!——这里写了什么?——具体是什么我已经搞不懂了!但大体上是关于世界如何运转的。(来源: Винтики)我再说一遍,这是极其低效、荒谬、不便且毫无意义的潜艇操控方案。但这可能会很有趣! 如何有格调地恶作剧 鉴于主题的广泛性,我创建了一份单独的指南,其中描述了利用电力进行破坏活动的方法。无人机返回潜艇系统 在本部分,我不会使用图片,而是提供工坊中已完成的作品,你可以方便地点击查看并了解该系统的工作原理,这里将描述其一般原则。 我们希望无人机能够自动返回潜艇(既可以通过指令直接返回潜艇,也可以在超出wi-fi网络覆盖范围时返回覆盖区域)。导航终端上有一些很少有人使用的端子:【当前位置_X/Y】。通过连接屏幕,我们可以利用这些端子,用无人机的坐标减去潜艇的坐标,从而得知两者之间的坐标差。这样,我们就能根据潜艇的坐标,始终知道无人机需要返回的精确坐标点。将该点的坐标与无人机当前坐标进行对比后,向发动机或泵发送可使其靠近潜艇的数值。原则上,如果再使用“X/Y当前速度”端子,就可以非常精确地计算所有内容,确保靠近潜艇甚至对接过程始终顺利。但我比较懒,所以只做了简单的防撞保护。它虽然不能总是完全避免碰撞,但可以减轻冲击力,还能帮助避开靠近潜艇路径上的障碍物(同样,如果有需要的话,甚至可以用它来编写避障算法)。为了让潜艇能够返回Wi-Fi覆盖区域,当无线组件失去信号时,需要发出一个短时脉冲来启动返回系统,而当回到覆盖区域时则关闭该系统。并且,这个信号的生成必须直接在无人机上进行。我选择导航终端的正常工作状态作为信号,将其接入无线组件(不过任何组件发出的持续信号也可以)。而无人机上,当该信号消失和出现时产生的瞬时信号,是通过NOT、OR和XOR组件的组合生成的,这个信号会激活返回系统本身。 这里可以通过螺丝拆解整个系统。请注意查看注释。这是一架无人机,除了该系统外,还内置了角色跟随系统和文本控制系统。 补充说明: - 趣闻:在编辑器中可以将导线颜色更改为工程师标准调色板之外的其他颜色。但游戏中本身也存在其他颜色的导线。