换一换
换一换 





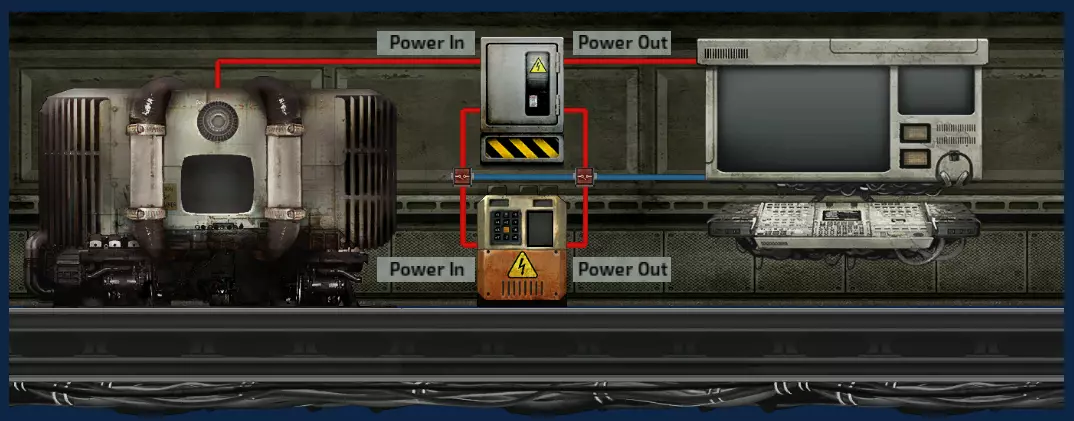
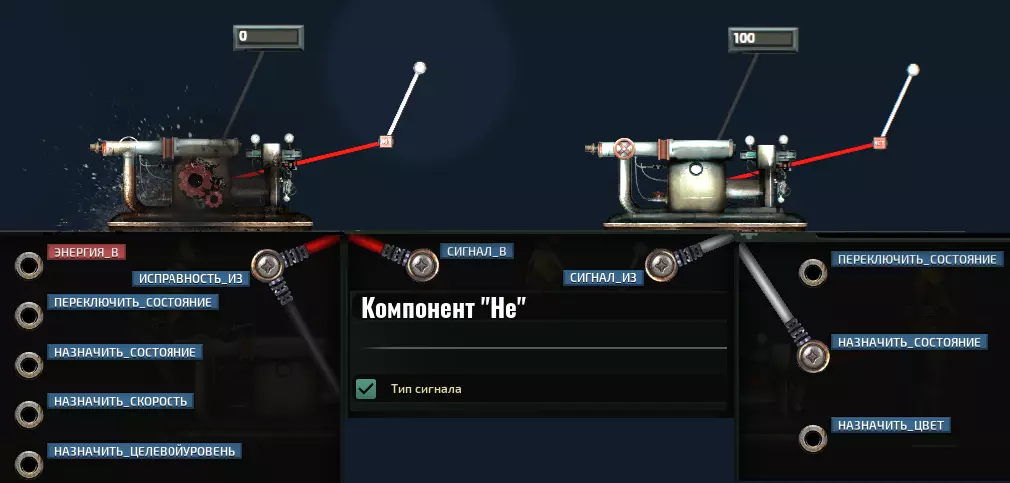
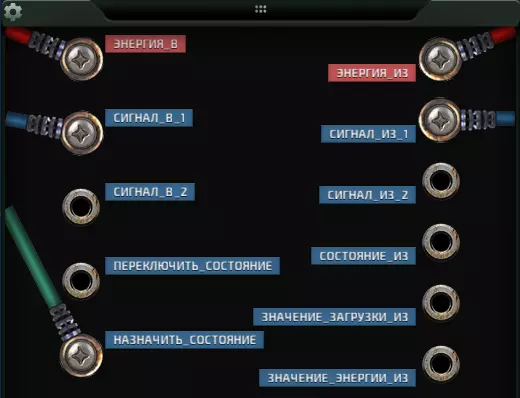
让我们详细了解每个组件的工作原理。同时,我们也将学习如何研究组件的工作方式。 引言 本指南尚处于开发阶段……目前我们只讨论一些特别有趣的组件。撰写本文主要是为了给自己留下一些基础知识的备忘。 接口类型 所有组件都会接收和/或发送逻辑信号。【继电器】组件是个例外,它还能传输电流,但这是另一回事了。当你用螺丝刀打开组件时,会看到用于连接电线的接口。左侧通常是接收信号的接口,它们通常被称为【信号输入】(“信号”一词可能会被某个有实际意义的名称替代)。右侧则是发送接口,即信息从组件输出的接口,相应地被称为【信号输出】。这是漏洞还是特性,很难说。这个组件的奇特特性可以用来判断空信号。空=空?——无论如何都是空。组件:【与门】(AND)、【或门】(OR)即使导线是从右侧延伸过来的,但如果信息需要传入组件内部,就必须连接到左侧接口。 任何接口都有一个重要限制:其上连接的导线不能超过5根。 通常情况下,多个导线会连接在输出端上,此时信号会简单地复制到所有导线中。 有时输入端会连接两根导线,这种情况下信号只能从其中一根导线传入。如果有两个或更多导线同时输入信号,则只会选择其中一个信号。说实话,我始终没弄明白从多个输入导线中选择信号的原理,所以最好避免这种情况。 信号类型 信号可以是:空信号(即完全不存在) 可以是数字 可以是字符串 严格来说,所有数字都可以转换为字符串。因此,可以假设所有非空信号都只是字符串。如果这些字符串具有特定格式(例如“123.456”),组件可以将该字符串转换为数字,计算结果,然后再次以字符串形式输出。典型的信号是“1”和“0”,分别对应真和假。不过匹配的完整性取决于组件,因此空信号通常也是错误的。 所谓的颜色信号(承载颜色信息)只不过是由四个0到255的整数组成的字符串,这些整数用逗号连接在一起。 格式为RGBA(红、绿、蓝、Alpha通道) 示例: "255,0,0,255" - 鲜红色 "0,255,0,255" - 鲜绿色 因此,几乎任何组件都可以输出颜色信息。== 组件 == 约定 许多组件的基本构造相同。因此,我引入了一系列符号,以便能更标准化地进行说明。 空无信号 - 即空信号,或简称为空。 当接口(输入端)未连接导线时,本质上也是空信号,因为确实没有信号(没有导线哪来的信号呢?)。【成功】许多组件中可以指定输出信号的精确值。该参数通常被称为“输出”,有时也叫“功率”。由于我们也将导线本身称为输出,因此我会将此类值称为带引号的“成功”,或简称为“是”。它可以是数字或字符串。 【失败】相应地,“错误输出”我会称为带引号的“失败”,或简称为“否”。【失败】有时参数值为空字符串表示空信号。这取决于组件类型。通常会在悬浮提示中明确说明。我会用括号标注这种情况。 组件 - 等于 比较两个信号。如果它们相等,则输出【成功】,否则输出【失败】。 当出现空信号时,问题就开始了。当一个输入端有信号,而另一个输入端无信号时,第一个信号会与第二个输入端的上一个信号进行比较。 5=5?--> 是。 5=空?--> 还是是,因为之前比较的是“5”和“5”。 6=空?--> 否,因为之前第二个输入端是“5”。 空=6?是,因为第一个输入端刚刚是“6”。 如果两个输入端均为空信号,那么输出端也会是空,即使设置了错误的输出!
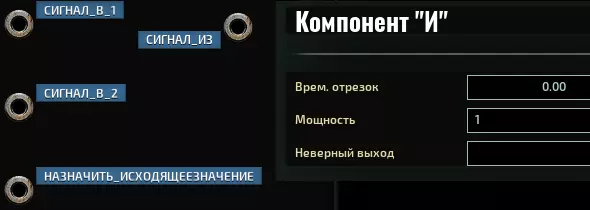
【与门】组件在两个输入均为真时输出【成功】,但当至少有一个信号为假时输出【(失败)】。 假信号包括【0】和空信号。 真信号指其他所有信号,例如【1】、【5】、【hello】以及空字符串【""】。 因此,两个空信号输入时会输出【(失败)】,这与【等于门】组件不同。 示例: 1 和 1?--> 是。 1 和 2?--> 是。 1 和【hello】?--> 是。 1 和 0?--> 否。 0 和【hello】?--> 否。 0 和 0?--> 否。 1 和空?--> 否。 空和空?--> 否。否。 【或】组件(OR)的作用类似,且具有相同的设置。 1和1?→ 是。 1和0?→ 是。 1和空?→ 是。 0和0?→ 否。 需要说明的是,该组件只有两个输入,这是一个严重的限制。通常,当需要“合并”多个信号时,可以在一个接口中连接多根能够接收“1”或空值的导线(但不能是“0”,否则无法确定哪个信号“胜出”)。每个接口有5根导线,总共最多10根导线。
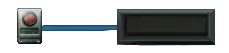
【内存】组件 该组件拥有内部数值,并会持续将其输出。在游戏中可以使用螺丝刀手动设置该数值。 注意!空字符串指的是长度为零的字符串,而非无信号。大多数组件会将其识别为非数字字符串。 内部数值不能为空。默认情况下,制作或购买后,内部值为空白字符串。 【输入信号】用于接收信号以更改内部值,但并非必需。如果需要常量,可以直接指定并仅使用输出端。 示例:此处每个新示例都是对前一个示例的修改。第一个例子——在购买或制作后立即进行: 空值——>""(空字符串,默认值) 手动设置为"123" 空值——>"123" "234"——>"234"(内部值已更改) 空值——>"234"(输入信号消失,但内部值保留) 如您所见,空信号不会改变组件的内部值。任何其他非空信号都会被记录到内存中,然后传输到输出端。由于内部值不能为空,该组件【始终】会在输出端传输某些内容。 【锁定状态】这一功能并不常用。它本质上是另一个内部值,用于指示是否忽略【输入信号】。 “1” - 接收输入端的信号。 任何其他信号 - 忽略输入端的信号。 空值 - 不更改此参数。如果此前为“1”,则输入端的信号将继续被接收;若为其他信号(例如“0”或“hello”),则将继续被忽略。 以上是关于【信号输入】接收信号的示例。假设我们发送“0”至【锁定状态】,从而禁止更改信号: 空值 ---> ""(空字符串,默认值) 手动设置为“123” 空值 ---> "123"(因为我们直接编辑了组件,而非通过信号) "234" ---> "123" 空值 ---> "123" "hello" ---> "123" 不过,输出结果无论如何都不会是空信号。 文本屏幕 直观显示输入端接收到的信号。如果输入为空信号,文本不会发生变化!因此,使用文本屏幕来检查组件工作状态并不容易。当组件停止通过线路输出信号时,屏幕不会显示出来。 例如,将一个全新(购买的)屏幕安装在墙上,并通过线路连接到脉冲按钮,起初屏幕上会显示空白(空字符串),按下按钮后会显示“1”。但此时按钮不会再输出任何信号:
可以对【内存】组件进行类似实验。在游戏中修改该组件的数值,文本屏幕上的数值也会随之变化。然后断开导线,屏幕上的数值会保持不变。当然,没有导线的情况下,后续对【内存】的修改将不再生效。
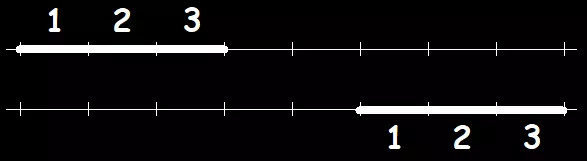
由此可以得出结论,文本屏幕具有内在价值,就像【记忆】组件一样,在没有输入信号时也不会发生变化。 【非】组件 仅有两个接口:信号输入和信号输出。 显然,该组件会让信号通过自身并将其反转。 将真转换为假 将假转换为真 有两种模式,由【信号类型】复选框设定(可在游戏中实时更改)。当复选框关闭(默认状态)时: - 假对应“0”和空字符串 - 真对应其他任何信号 - 输入为空时输出为空 - “0”→“1” - “1”→“0” - “2”→“0” - “hello”→“0” - “”→“1” - 空→空 当复选框开启时: - 假对应“0”、空字符串和空信号 - 真对应其他任何信号"0" ---> "1" "1" ---> "0" "2" ---> "0" "hello" ---> "0" "" ---> "1" Пусто ---> "1" 组件 - 延迟 其工作原理非常简单 - 在一段时间(N秒)内延迟所有输入内容,并按相同的顺序和持续时间传输到输出端。 示例(延迟N=5秒): 向输入端依次输入"1"、"2"、"3",每个信号持续1秒,然后输入Пусто。这段时间输出会是【空】,然后再持续2秒【空】,之后会依次显示“1”、“2”、“3”,且显示时长相同。
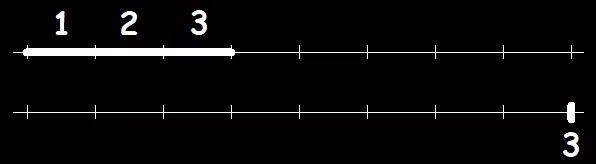
接收信号时重置 此复选框的效果会影响整个组件的工作。只要输入端存在信号,以及信号结束后的N秒内,输出端会持续输出空信号。 显然,空信号也会重复,因此在最后一个信号结束N秒后,会出现一个脉冲(单次)信号,随后是无限的空状态。示例(延迟N=5秒): 输入“1”,然后“2”,然后“3”,每个信号持续1秒,之后为空。 在此期间将一直为空,之后输出端还会为空5秒,随后出现持续1个滴答(约0.017秒)的信号“3”,然后再次为空。
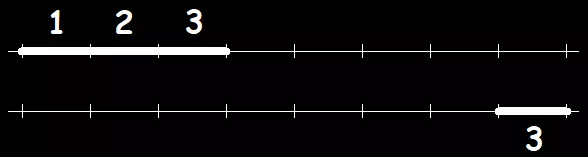
这用于将持续信号转换为脉冲信号。例如,用于切换设备状态。 收到其他信号时重置 此复选框的效果会影响整个组件的工作。在开始接收其他信号后的N秒内,输出端会持续输出空信号。 示例(延迟N=5秒): 向输入端依次输入“1”“2”“3”,每个信号持续1秒,之后为空信号。这段时间内会显示【空白】,之后再持续4秒【空白】,然后在1秒内显示“3”,接着再次变为【空白】。
另一个例子:
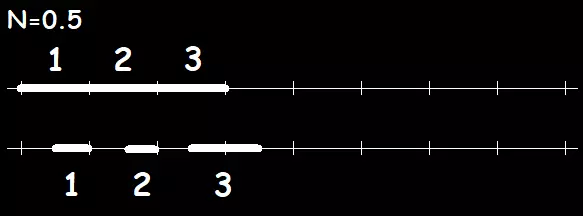
这是为了平滑信号的“波动”。例如,如果信号频繁变化,该组件会在一段时间内忽略这些信号(并输出【空】),当信号稳定后,会稍作等待并输出最后的信号。 这两个复选框可以同时勾选,但显然第一个复选框的优先级更高。因此,如果勾选了第一个,第二个就不再重要了。 组件 - 【WiFi】 默认情况下,该组件会接收同一频道上的无线信号。但当线路输入有非空信号时,该组件会立即暂时转变为发射器。此时它将停止接收信号(线路输出端将始终为空白信号)。 作为发射器,该组件会向同一频道上的所有同类组件发送信号。但显然,仅限在WiFi作用范围内的组件。 范围(仅在编辑器中)距离以厘米为单位!它仅在激活状态下传导电流和信号。 能量输入 =====> 能量输出 信号输入1 ----- > 信号输出1 信号输入2 ----- > 信号输出2为了大致了解角色身高,设定为175厘米。如果在潜艇编辑器中启用网格(Shift+右键点击),角色身高将显示为11个单元格,因为每个单元格等于16厘米。此外,在编辑器中可以按住Alt键,然后拖动鼠标左键,用测量线来测量距离。 默认情况下,范围显示为20000,即200米。WiFi的距离应该大致是这个数值,不过它的穿透能力很强,尤其是在洞穴内部,不太符合现实情况。声呐 如果通过WiFi传输声呐信号,当超过特定阈值时,显示器上会显示【弱信号】字样,但数据仍会继续传输。显然,在更远距离时会变为【无信号】。 信号检查组件 接收输入信号并将其与内部的【目标信号】值进行比较,该值可以为空字符串。内部值不能为空。如果信号与内部值匹配,则显示【成功】,否则显示【失败】。 例外情况:若输入为空,则无论是否指定“错误输出”,结果也为空。 空值?——> 始终为空。 内部值也可通过逻辑修改,将其输入【设置目标信号】。若未向该接口输入任何内容(即空值),则将使用旧值(手动设置或通过线路设置的值)。请注意,当参数值为空白字符串时,“(成功)”和“(失败)”这两种结果都可能会发出空信号。遗憾的是,这一点在弹出提示中完全没有说明。 示例中我们将使用目标信号=3(即内部值)。 0?——否 1?——否 2?——否 3?——是 4?——否 空白?——无论如何都是空白。 组件:“+”、“-”等。 即对数字进行算术运算。输出限制需指定最大值和最小值。默认值为999999.0和-999999.0,暂时保持不变。 不同组件的特性示例: 加法(“+”) 空值 + 空值 ---> 空值 “1” + 空值 ---> 空值 “1” + “1” ---> “2” “1” + “6” ---> “7” “1” + “6.5” ---> “7.5” “1” + “6.000001” ---> “7.000001” “1” + “6.”"0000001" ---> "7"(超出计算精度范围) "1" + "-6" ---> "-5"(负数也是有效的数字) "1" + "hello" ---> "1"(非数字被视为"0") "1" + "" ---> "1"(空字符串也视为"0") "1" + "7abc" ---> "1"(非完整数字被视为"0") "1" + "7,7,7,7" ---> "1" "1" + "7." ---> "8"(可以保留末尾的小数点,不算错误) "1" + ".7" ---> "1.7" "0.1" + "0.2" ---> "0."3英寸(结果似乎进行了四舍五入) 乘法“5”ד5”→“25” “123456”ד123456”→“999999”(触发了限制器) “123456”ד0.123456”→“15241.383”(正确结果应为15241.383936,存在精度限制) “0.123456”ד0.123456”→“0.0152413845”(正确结果应为0.015241383936,存在精度限制) 由此可知,精度限制为7位数字。 关于乘法的情况已经明确,没有其他问题。 除法“1”/“0”→空 “1”/“0.00001”→空 “1”/“0.0001”→“10000” “1”/空→空 “1”/“3”→“0.”33333334"(再次达到精度极限) 正弦("sin")空值 ---> 空值 "0" ---> "0" "90" ---> "1" "270" ---> "-1" "45" ---> "0.70710677" "hello" ---> "0" 其他算术运算也应按此规则运行。即无效字符串会转换为数字"0"。当任何输入接收到空值信号时,输出也会为空值。诸如除以零之类的错误也会转换为空值。 继电器 接下来我们来介绍最有趣的组件之一。
而这种活动状态的存在使得该组件类似于灯泡、门和舱口这类装置。 从电路角度来说,该组件允许电流通过,但其最大电流为1000。因此,借助这些组件,可以减少灯泡和小型泵的接线板使用数量。 多个继电器可以串联起来,更准确地说,是连接成一种“树状”结构。但显然,第一个继电器将为所有受其供电的设备以及其他继电器设定总功率限制(1000)。 从逻辑上讲,信号2会直接进入输出2,不会与任何东西混淆或叠加。也就是说,这相当于一个“2合1”继电器,但具有统一的开关控制。 切换状态:接收脉冲信号并将活动状态切换为相反状态。 “0”和空值:无任何反应。在潜艇编辑器中可以设置机械开始维修的阈值,通常该阈值为80%。但也有例外情况,例如小型泵的阈值可能因潜艇设计而异。 几乎所有机械都遵循以下规则:当状态低于100%时,机械的工作效率会下降,同时能耗会增加。“惩罚”为每10%损伤对应5%,但不适用于“安全”损伤范围内。以发动机为例: 完整度 消耗 速度 100% 100% 100% 90% 100% 100% 82% 100% 100% 80% 110%(+10%) 90% 78% 111% 89% 77% 111.5% 88.5% 70% 115% 85% 60% 120% 80% 50% 125% 75% 40% 130% 70% 30% 135% 65% 20% 140% 60% 10% 145% 55% 1% 149.5% 50.5% 0% 无法工作 无法工作 也就是说,如果发动机正常消耗为2000,那么在20%状态时它将消耗2800,且最大速度会降低40%。类似地,【氧气发生器】的消耗增加、产出减少,【水泵】性能下降,【显示器】显示效果变差,【电池】续航能力降低,【制造机】运行速度变慢等等。 这种影响是持续性的。这意味着如果【状态值】返回50,实际数值可能是50.38465或49.72845,而公式中使用的正是这个精确数值。 因此,例如发动机的最大消耗量可能会每0.增加1W。2秒,当他在水中时。 反应堆 原版潜艇的反应堆特性 名称 等级 功率 起火 熔化 消耗 獾 1 4200 18 45 0.2 独角鲸 1 3000 10 30 0.2 姥鲨 1 3500 10 30 0.3 骆驼 1 5200 20 120 0.2 驼背鲸 2 3100 10 30 0.2 姥鲨-2 2 4000 10 30 0.3 方位角 2 3500 10 30 0.2 台风 2 5000 10 30 0.25 齿轮 2 4800 20 120 0.2 R-29“货车” 2 5200 18 40 0.2 铍 3 6500 7 20 0.3 鮣鱼 3 5000 8 20 0.3 台风-2 3 5200 15 90 0.2 锅 3 5000 15 90 0.3 温特哈尔特 3 8500 20 120 0.3 “等级” - 潜艇等级(1、2或3),影响其购买地点和升级限制。【功率】- 最大能量输出(无法超过此数值)。 【起火】- 温度达到6482°C后,经过多少秒开始起火。 【熔化】- 温度达到7965°C后,经过多少秒开始熔化。 熔化意味着核爆炸(在本游戏中为同义词)。 【消耗】- 燃料棒消耗的速度。其消耗速度仅取决于裂变反应。多根棒状物共同分担消耗,因此每根的消耗速度都会变慢。 消耗品“1”以及其他任何字符串(包括空字符串)会切换状态。 如果输入持续信号(例如“1”),继电器会反复切换。继电器会每秒60次(每个游戏刻)进行开关切换。不要这样做,这并不好。 【设置状态】空 - 无任何操作。 “0” - 关闭继电器。 “1”以及其他任何字符串 - 开启继电器。 这可以是持续信号。 即使切换信号:“1”、空、“1”、“2”等也可以。这不会改变任何事情。继电器将会被激活。只有“0”才能关闭这个接口。 状态_从“1”表示已激活,否则为“0”。 负载值_从显示连接到继电器的所有设备的总功率需求。例如,如果连接一个功率为2500的引擎,并且在舰桥上选择最大向右行驶方向,那么该值将显示为2500,即使由于功率不足引擎实际上无法运行。毕竟继电器的输出功率不超过1000,而发动机正常工作通常至少需要所需功率的一半。但如果将“完全向右”改为“向右一半”,那么输出端的这个数值就会达到1250,尽管发动机仍然会以1000的功率运行,但还是会功率不足。 【能量输出值】这个数值等于继电器输出的功率。它不能超过1000。在之前的例子中,假设输入的能量足够,那么输出将会是1000。而如果将功率为2500的发动机直接通过三个继电器连接能量,并在舰桥上按下“全速前进”(向左或向右均可),那么每个继电器的输出能量约为833。如你所知,负载仍为2500。此时发动机不会出现能量不足的情况,因为三个继电器的总功率可达3000。和【加载值】一样,这是一个逻辑信号,也就是数字。不要与红色名称的能量接口混淆。 拆解潜艇:当你在游戏中从潜艇上卸下该组件时,它可能处于关闭状态。请注意,此状态会保存在物品栏中。你可能会把这个组件放进箱子,保存游戏,然后过很久才想起它。之后你可能会想直接像通过三通管那样给它通电,但它不会工作。要启动它,需要将电线与【记忆】组件或按钮配合使用。或者可以仔细留意你在潜艇上组装组件时的状态。新制造的(刚在制造机上生产的)和商店购买的(刚买到的)组件默认处于激活状态。== 机制 == 大多数机制都有相似的输入和输出,我们不会每次都重复解释: 【能源输入】如果存在此输入,则机械(装置)需要供电,否则无法运行。 在基板编辑器中可以设置装置运行所需的最低功率水平,即使效率较低也能运行。大多数装置的此值为50%。对于泵类设备,这个数值通常为30%。 举例: 某设备需要100单位功率。 所有设备总功率需求为2000单位。 反应堆(可能还有电池)输出700单位功率。 这意味着该设备将无法运行,因为它只能获得35单位功率,但潜艇上的泵仍能正常工作。 【状态值】:0到100之间的整数,表示机械的完好程度。 0 - 机械损坏。 100 - 机械完全修复。
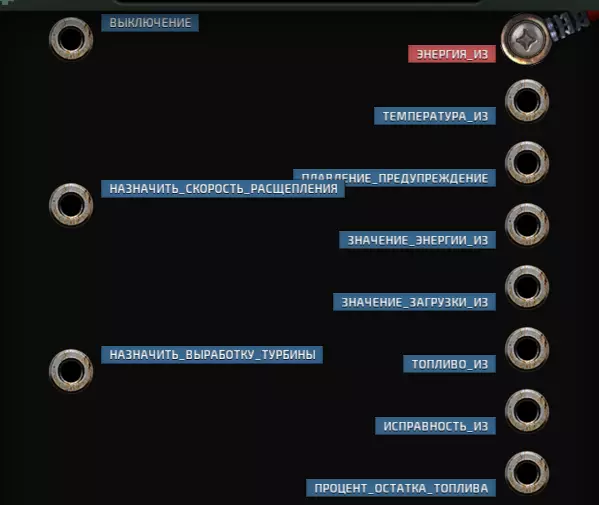
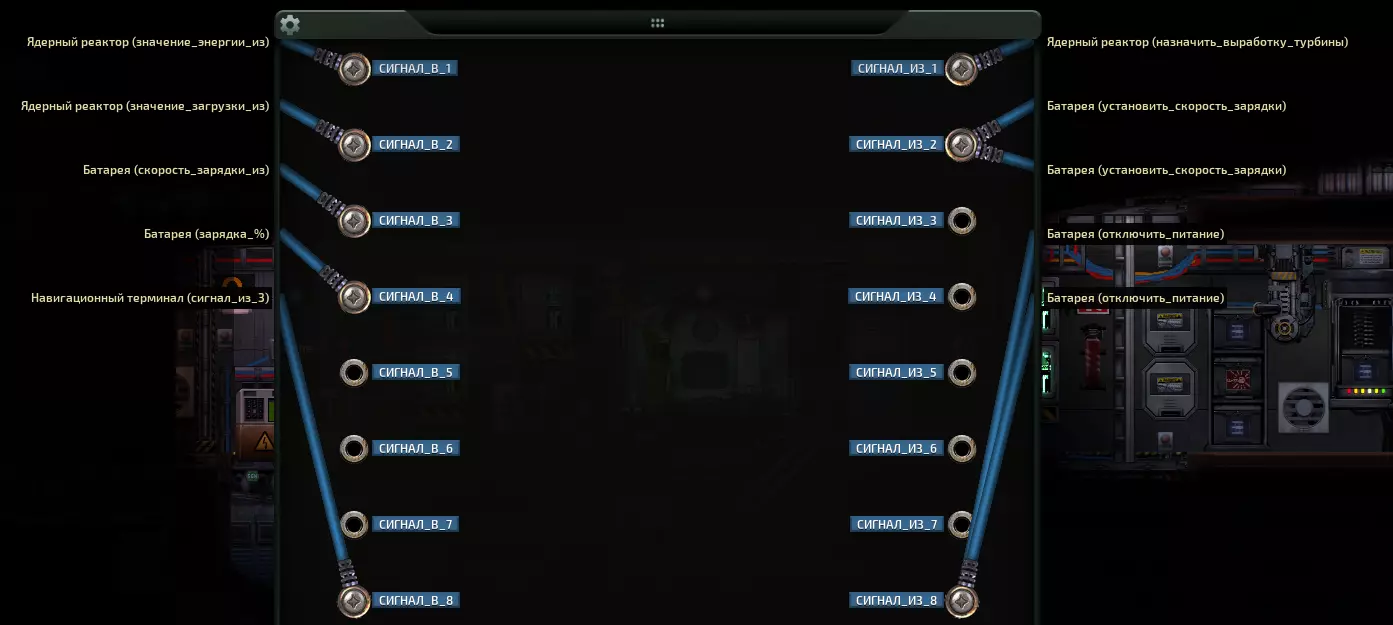
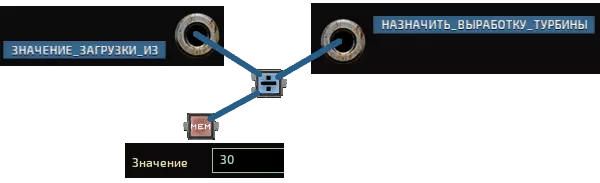
能量输出:当有控制棒时,反应堆会产生电力。能量显然是通过这条线路从反应堆输出的。其中存在一些细节,例如低温会设定一个限制。但这里我们不涉及这些细节。安装两到三根控制棒可以快速解决这个问题。 例外情况是,这个接口只能连接一条线路,真可惜。因此很明显,他必须前往最近的电缆箱。 温度_是0到10000之间的整数。 5000是自动系统运行时的平均温度。 5400被认为是理想情况下不应超过的危险阈值。 6482之后会启动起火计时器(见表)。 7965之后会启动熔化计时器(见表)。设备所需的电量(图表中的白色线条)应与反应堆的输出电量(图表中的黄色线条)保持一致。因此,计算公式通常为:输出功率=负载×100÷最大功率。以迪尤戈尼级潜艇为例,如果设备需要2000单位电量,而我们知道反应堆的最大功率为3000单位,那么需要将数值设为66.6666。【熔化警告】持续信号,即使反应堆已关闭。当熔化计时器启动时为1,否则为0。漏洞:尽管这是输出端,但可以将其用作输入端并发送信号。这将导致反应堆警报启动。此时警报将独立于反应堆状态运行,甚至在反应堆关闭时也会触发。 【能量输出值】0到最大功率之间的整数。持续信号,即使反应堆已关闭。 显示反应堆输出的能量(通过线路)。 详情请参见组件【继电器】。 最大功率受多种修饰符影响!在为反应堆编写逻辑时请注意这些修饰符。 负载值来自0到最大功率之间的整数。 持续信号,即使反应堆已关闭。显示所有通过线路连接的设备(即通过所有接线盒、继电器等)所需的总能量。 有关详情,请参见【继电器】组件,此处操作方式相同。 【燃料棒】整数,范围为0到600。 即使反应堆关闭,信号也持续存在。 显示燃料棒的“热势能”(实质上是它们的额定功率)。【热稳定性】 铀棒:80 钍棒:100 雷暴棒:150 不稳定雷暴棒:150 (同时标注了耐用度——即持续工作时间) 铀棒:100 钍棒:200 雷暴棒:150 不稳定雷暴棒:400 在燃料棒“燃烧”过程中,总数值不会发生变化。两根二手铀棒在该线路上会显示160,铀棒加钍棒则会显示180。当然,当某根燃料棒耗尽至0时,它将不再被计入。 【燃料剩余百分比】 数值范围为0到400。 这是所有燃料棒百分比的总和。不管具体是哪种燃料棒,百分比就是百分比。不过这里要说明的是,【燃料棒】的【耐久度】越高(详见表格),它在反应堆中“燃烧”的时间就越长。 如果有多个燃料棒,它们的消耗速度会更慢。因此,两根【铀燃料棒】从200耐久开始消耗,会比一根100耐久的燃料棒慢两倍。【关闭输入】当反应堆处于自动控制模式时,接收到任何信号(当然,除了空信号)都会关闭反应堆。而在手动模式下,该线路上的所有信号都会被忽略,这正是手动模式的特点。 【设置裂变速度】取值范围为0到100,可为小数。将裂变速度滑块设置到所需位置。这是为了以另一种方式实现反应堆的自动化。滑块会缓慢移动到目标水平。如果处于手动模式,玩家可以手动移动滑块,速度会快很多。两者互不影响。但如果设置为自动模式,这种原版自动功能将无法工作,且玩家无法手动调整滑块。【设定涡轮机输出功率】与【设定反应堆功率】功能相同(数值范围0-100),但该功能用于设定涡轮机的输出功率。 这通常是玩家为反应堆编写控制逻辑时首先会实现的自动化功能。如果电力不足,设备将无法正常运行;而电力过剩时,设备和电缆盒则会迅速损坏。显然,涡轮机的输出功率应与电力负载相匹配。
全面分析如何改进反应堆超出了本指南的范围。 氧气发生器 默认功率为1000。潜艇作者可以修改此数值,但通常不这么做。 【氧气发生器】产生氧气并将其输送至所有(已连接的)通风出口。它有一个内部氧气生成值,默认值为400,但潜艇作者可以在编辑器中根据自己的意愿进行设置。一个人的氧气消耗量约为7。 已经计算过了吗?是的,大约可以供57人使用。但事情并非看起来那么简单。 氧气只会分配到有通风出口的房间,并且是按舱室体积(即面积,因为游戏是2D的)成比例分配的。舱室的氧气含量不会影响氧气的分配。舱室之间若有敞开的门或舱口,自然会导致舱室间的氧气迅速平衡。 示例: - 氧气被平均输送到两个舱室; - 第二个舱室的体积是第一个的10倍; - 整个团队(8人)聚集在门关闭的第一个舱室内。 此时,第一个舱室的氧气生成量将是总量的1/11,即约36单位,而非400单位。由于舱门关闭,第二个舱室的氧气无法进入第一个舱室。即便第二个舱室有100%的氧气且无人使用(即无人呼吸)也无济于事。因此,第一个舱室的氧气生成量仅够36/7——大约可供5人使用。由于队伍有8人,所以如果其中至少3人不戴上氧气面罩或潜水服,他们很快就会窒息。 排水量
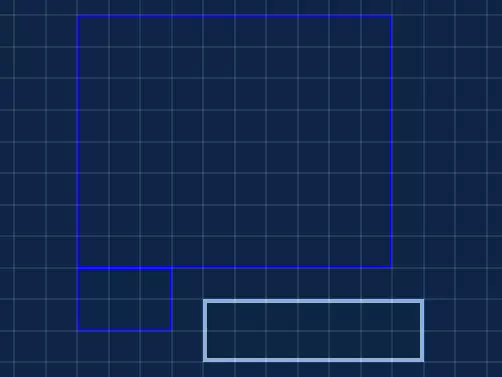
总排水量等于所有舱室面积的总和。潜艇达到平衡状态时,水量恰好为总排水量的7%。这意味着理想的压载舱容积应为14%,此时平衡水位将是压载舱50%的填充量(见图)。否则,平衡水位将会不同。如果差异较大,潜艇作者最好在控制台属性中明确注明这一点,以便玩家发送带有偏移量的目标深度。 排水量失衡:如果压载水舱的总体积小于7%,潜艇将无法下潜。这属于潜艇作者的失误。但即便如此,在实际游戏中也可以通过手动向某个舱室注水来解决。当舱室持续充满时,它会影响压载水舱的平衡水位。此外,如果某个舱室中装有泵,也可以将其改造成压载水舱。小型泵同样适用。需要像连接其他压载水泵一样为其连接线路。与压载舱的唯一区别是,它不会被标记为“潮湿”,此选项在实际游戏中不可用,因此NPC会随意进入其中闲逛。 显然,被改造成压载舱的舱室越多,下潜和上浮的速度就越快。然而,这也会导致压力变化更为剧烈。而且,并非每个舱室都适合注水,有些舱室内可能装有易被水损坏的机械装置。在某些情况下,泵的位置可能远高于地面,或者舱室的形状可能不规则(不是矩形),但这些都是罕见情况。如果“弯曲”舱室的各个部分相互连接,那么它会被视为一个整体。如果没有这种连接,泵将只填充它所在的那个舱室。这也是为什么当舱门打开时,压载舱注水时水不会溢出的原因。接驳艇 已接驳的接驳艇会改变整体排水量,因此压载系统会进行相应调整。为避免平衡水位发生显著变化,接驳艇的体积应远小于潜艇体积,这样其接驳与脱离操作的影响就不会太明显。 与其他潜艇接驳 大型潜艇之间的接驳原理类似。它们会如同拼接在一起,从而使排水量合并为一个整体。如果仅使用一艘潜艇的水泵,理论上在完全排水时可能不足以实现下潜。每艘潜艇都有其独特的操控逻辑。因此,如果第二艘潜艇处于自动驾驶状态,那么在尝试下潜时,它会试图排空自身的压载水,也就是会与主潜艇的操控产生对抗。为避免这种情况,需要在第二艘潜艇上使用手动控制,并将压载舱注水至50%。两艘潜艇的连接体虽然会非常迟钝,但仍然能够上浮和下潜。 导航终端
【速度X_IZV】手动控制的工作方式如下: 1. 船长点击声呐上的某个点,在那里设置一个红色方块。这个方块设定一个从-100到100的整数目标值。 -100表示“全速后退” 100表示“全速前进” 0表示“完全停止” 2. 之后,某个箭头会相当快速地滑向这个方块。在它滑动期间,输出值会平滑变化,并且可能不是整数。当指针到达方块时,数值会变为整数。 通常线路会直接连接到发动机。但工程师完全可以用自己的逻辑截获这个数值,并对其进行某种数学处理。:) 【Y轴速度】类似,只是表示红色方块在垂直方向上的位移,并且线路相应地连接到压载水泵的“目标液位”接口。同样,工程师完全可以将任何带泵的房间改造成压载舱。只需要一些电线,无需任何特殊技巧。但这不一定能改善潜艇上的生活。 信号_1、信号_2和信号_3:如果电线连接到接口,船长就会获得相应的按钮。可以按下该按钮,它会发出脉冲信号“1”,就像普通按钮一样。 遗憾的是,只能在潜艇编辑器中为按钮命名。启用对接功能 当电线连接到此处时,靠近可对接位置后,终端右侧会出现红色按钮。按下该按钮将发送“1”脉冲。 接口设计巧妙。虽然看似是输出信号,但实际上通过这根电线会接收来自对接舱门的信息。否则按钮如何知道何时出现、何时闪烁呢?这也取决于终端连接到哪个具体的对接舱门(如果有多个舱门的话)。当同时连接两个对接舱门时,其中任何一个都可能向该接口反馈可能的对接情况。 信息接口显示速度以及垂直和水平位置。输出为实数,小数点后不超过4位。 转换器接口通常此接口不工作。同时使用终端内置的声呐以及所有相关功能。要使接口正常工作,需在潜艇编辑器中勾选【使用转换器】选项。
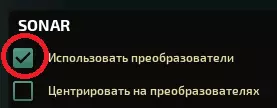
可以根据需要勾选【以转换器为中心】选项。遗憾的是,游戏过程中这两个选项均不可用。

它是如何运作的?会出现新的机制。需要连接外部声呐。如果声呐未连接或断电,终端上会显示【无信号】。如果声呐在小型潜艇(通过WiFi连接)上,且小型潜艇距离较远,会先显示【信号微弱】,之后变为【无信号】。 接口设计也很特别,因为声呐的开关是在终端上操作的,尽管这看起来像是一个接收接口。也就是说,这又是双向的信息交换。 速度_V(???) 将转向控制速度设置为指定值。信号必须包含X速度和Y速度,用逗号分隔。例如,“-40,30”。 正如您所记得的,在每个方向的输出端,速度在-100到100之间变化。 状态显示器 当提供能源时,显示潜艇的舱室地图、机械状态以及其他信息。在潜艇编辑器中可以设置是否需要探测器来显示信息,以及具体显示哪些信息。
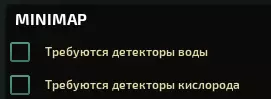
使用上述设置时无需任何传感器。监控器会以类似心灵感应的方式得知所有舱室的水位和空气水平,即便舱室内没有传感器。例如,“迪尤贡”号潜艇就采用了此类设置。其他潜艇可能更为复杂,但通常会预先安装部分传感器。 【水数据接口】请在此处连接所有水传感器,可通过继电器连接。只需确保线路(直接连接或通过继电器)连接到此接口即可。逻辑信号相互覆盖的规则在这里不适用。直接连接,信息就会显示在地图上。 毕竟如果从线路中获取数值,那会是一个数字。但不知为何,显示器还能知道信号来自哪个具体舱室。这只能说是魔法了。 【空气数据】同样可以在这里连接来自特定舱室的空气传感器。 小技巧
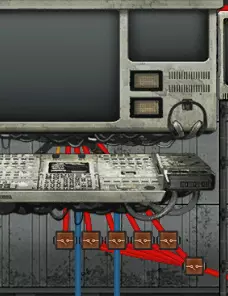
给低功率重要设备的一个小技巧。你可以通过增加连接到其电源接口的电线数量,来提高它们的能源消耗优先级。 右边的截图是导航终端的这种技巧示例。它连接了5根电线,这使其在能源分配系统中的“重要性”提高了5倍。实际上是通过同一个继电器连接的,这一点并不重要。屏幕上还有5个继电器,它们并非必需,因为可以从一个继电器引出所有线路。即使反应堆输出500单位电力,而总耗电量为2000单位,控制台仍然可以正常运行。比如,泵可能无法工作,因为它们至少需要30%的电力,而控制台却可以。状态显示器也可以采用类似的方式处理。 不过,泵也可以通过这种方式进行改进,但这样一来,控制台获得的电力就会减少……这真是个两难的选择。发动机 本质上有一个重要的逻辑接口: 【设定功率】接收-100到100之间的数值,其中-100表示完全倒车,100表示完全前进。 最大能耗在潜艇编辑器中固定设置(每艘潜艇都有其特定值)。 实际能耗取决于功率。例如,40或-40意味着发动机以40%的功率运行,因此能耗也为最大值的40%。同时,发动机运行所需的基本阈值也会降低。通常,阈值为所需功率的一半。但如果发动机需要最大功率的40%,那么最低需求就是这个数值的一半,即最大功率的20%。由于发动机是能源消耗波动的最主要因素,因此经验丰富的船长必须明白,在复杂地形下使用“全速前进”实际上意味着“完全停止”,直到反应堆提升发电量为止,而此时潜艇上的其他设备也会断电,包括导航终端。 潜望镜和火炮 这两个机械装置具有对称的接口。 位置_从
潜望镜会发送一个0到360之间的实数,该数值表示火炮的旋转角度,且该数值并非整数。该数值由玩家在屏幕上放置鼠标光标的位置决定,即玩家可以“发送”任意角度,不受火炮限制的影响。但如果火炮无法旋转到该角度,它会根据自身的方向限制选择最接近的可能角度。因此,即使在这里输入错误的数字也没关系,它会被四舍五入、截断等处理。 【调出】当玩家在潜望镜上按下鼠标左键时,数值会变为“1”,并且这是一个持续信号,直到玩家松开鼠标左键为止。这不是脉冲信号!与玩家点击的按钮不同,这里的信号虽然短暂,但却是持续的。因此,在切换机制中不应发送原始信号,而应对其进行轻微的数学处理。例如,通过带有第一个“重置”开关的延迟信号。 关于具有对称接口【ВЫЗЫВАТЬ_В】的炮,信号的作用是“按住鼠标按钮时持续射击”。即只要信号为“1”就持续射击。 投影仪和摄像头:投影仪中有【ПОЗИЦИЯ_В】。本质上它和炮类似,只是没有射击功能。舱室内有【控制位】,其功能本质上与【职位】相同。 在游戏进行中,无法安装火炮、探照灯、摄像头或潜望镜。例外情况:若预先设有火炮安装位,则可以在升级潜艇时购买火炮,或更换现有火炮。我们认为可以这样做。首先,可以制作一个简单的装置,当你有两个摄像头和一个潜望镜时,通过按下按钮在摄像头之间切换。需要从潜望镜捕捉到“1”信号,对其进行清理,并用它来切换继电器,再通过继电器实现对两个不同摄像头的访问。理论上也可以在火炮之间切换,但意义不大。通过一些巧妙的设计,还能制作出控制火炮开火的开关,让火炮实现自动射击。或者可以设置控制不同旋转角度的按钮(比如每步10度),这样就能在潜艇的另一端操控火炮了。不过话说回来,这样做意义不大,因为操作火炮时视野很重要。但既然有线路可用,就具备实现这种操作的可能性。至于官方工程师兼建筑师会想出什么巧妙的办法,那就是他的事了。 对接舱门 所有原版潜艇的对接舱门都配备了一套组件,以确保其正常工作。让我们来解析这个经典的结构。 为了更清晰地展示,我将终端的输出端涂成了棕色,对接舱门的输出端涂成了橙色。同时,所有组件的输入端都位于左侧,输出端位于右侧。
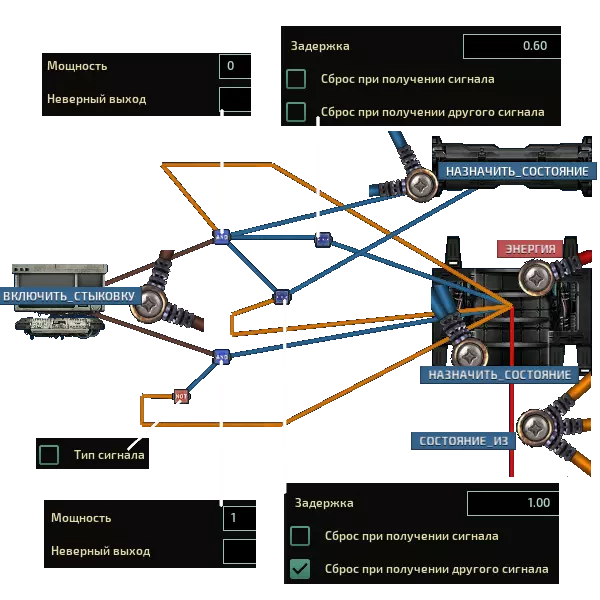
当靠近对接端口时,终端上会出现对接按钮。只有在靠近另一个舱门时该按钮才会生效,但在较远的距离时就会显示。按下按钮会发送“1”脉冲。可以看到,根据当前状态,脉冲会通过【与门】组件从线路图的上部路径或下部路径传输。分离状态(下方路径) 在“分离”状态下,舱门会发送“0”信号,因此信号只能通过下方路径传输。 来自按钮的脉冲信号“1”会直接传输至舱门,这意味着“对接”,即切换至“1”状态(对接状态)并开始在输出端显示该状态。如果对接的是殖民地,将加载新的区域;如果是其他物体,则会与之直接连接。对接状态(上部路径) 与之前类似,在此状态下舱门持续发送“1”信号。因此,终端信号仅通过上部路径传输。 按钮发出的脉冲信号“1”经过上部的“与”组件后变为“0”,并在半秒延迟后将对接舱门状态设为“0”,即发出脱离对接指令。 但这还不是全部。另有两条线路连接至普通的可调节舱门。其中一根导线直接连接。信号“0”表示“关闭舱门”,这在断开连接时立即执行是合理的。 第二根导线同样连接到同一位置,但带有延迟,即同样发送“0”信号,但会延迟1秒。这可能是为了在空间站(关卡重载时)再次发送该指令。然而,在这个延迟组件中,舱门的状态会作为反馈信号输入到其输入端。正如我们所知,状态是持续信号,将其与脉冲信号结合意义不大,但不知为何原版游戏就是这样设计的。 总之,结果就是可调节舱门与对接舱门紧密关联。这就导致了一个问题:当你在实战游戏中想将这个舱门改造成另一个通道时会遇到麻烦。 将舱门改造为通道 我会介绍一个简单的解决方法,复杂的方法则留给你自行探索。需要将所有电线从可调节舱门断开,并将按钮连接到【状态切换】接口。就这样。很简单。问题你之后会感受到。希望解决它们会很有趣。先说一下,外面通常有安装外部按钮的地方,虽然很难摸到。 在实际游戏中,电线与对接舱门连接的问题如下: 当对接舱门处于与任何物体对接的状态时,其相关设置将被锁定。处于分离状态时可以进行改装,但需要打开普通舱门,否则舱门会阻碍操作。解决方法是:先分离,再打开普通舱门(例如通过按钮操作),甚至可以切割掉部分船体,之后再进行你的改装操作。